







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
随着无线传感网络(Wireless Sensor Network,简称WSN)的快速发展,越来越多的应用场景需要对移动用户进行精确的位置定位。在建筑内部,例如大型商场、医院或办公楼,对于移动用户的位置信息的准确获取尤为重要。本文将介绍一种基于动态三角定位法的技术,用于实现建筑内移动用户的位置定位。
动态三角定位法是一种常用的无线定位技术,它利用无线信号的传播特性,通过多个节点之间的测距信息来计算目标节点的位置。在建筑内部,我们可以利用已经部署好的无线传感器节点(Wireless Sensor Nodes,简称WSN)来实现位置定位。这些节点可以通过无线信号的接收和发送来获取目标节点与其它节点之间的距离信息。
在动态三角定位法中,至少需要三个节点来进行测量,通过测量目标节点与这三个节点之间的距离,可以利用三角定位法计算出目标节点的位置。在建筑内部,我们可以将这些节点部署在不同的位置,例如墙壁上或天花板上,以覆盖整个区域。通过使用更多的节点,我们可以提高定位的精确度。
为了实现建筑内移动用户的位置定位,我们需要进行以下步骤:
-
部署传感器节点:在建筑内部选择合适的位置来部署传感器节点。节点之间的间距应该足够小,以确保能够准确测量目标节点与其它节点之间的距离。
-
测量距离:通过节点之间的通信,测量目标节点与每个节点之间的距离。这可以通过发送无线信号并测量信号的传输时间来实现。利用时间差来计算距离,并将距离信息发送给中心节点。
-
计算位置:中心节点收集到所有节点的距离信息后,利用动态三角定位法计算目标节点的位置。这可以通过将距离信息与节点的位置坐标进行计算来实现。
-
更新位置:根据计算得到的目标节点位置,可以将其实时更新到系统中。这样,我们就可以随时获取移动用户的准确位置信息。
动态三角定位法在建筑内移动用户位置定位中具有一定的优势。它不需要依赖额外的设备或基础设施,只需要利用已经部署好的传感器节点即可实现。同时,由于节点部署的灵活性,我们可以根据需要调整节点的数量和位置,以提高定位的精确度。
然而,动态三角定位法也存在一些挑战和限制。首先,传感器节点之间的距离测量需要高精度的时钟同步,以确保测量结果的准确性。其次,建筑内部的信号传播受到墙壁、家具等障碍物的影响,可能导致测量误差。此外,节点的能量消耗和通信开销也是需要考虑的问题。
验分为两个阶段,一是利用灰色预测算法对信号强度进行预测,二是利用动态三角定位法对移动用户的位置坐标进行定位。我们用灰色预测预测了移动用户移动阶段的RSSI趋势,并对移动用户移动时的预测RSSI趋势进行了分析。在移动移动时,灰色终结能够降低rssi的波动。灰预测定位算法实现了较小的平均距离误差.
总的来说,基于动态三角定位法的技术可以有效实现建筑内移动用户的位置定位。这种方法可以在不依赖额外设备的情况下利用已有的无线传感器节点,提供准确的位置信息。然而,在实际应用中,我们需要充分考虑到各种因素的影响,以确保定位系统的可靠性和精确性。
📣 部分代码
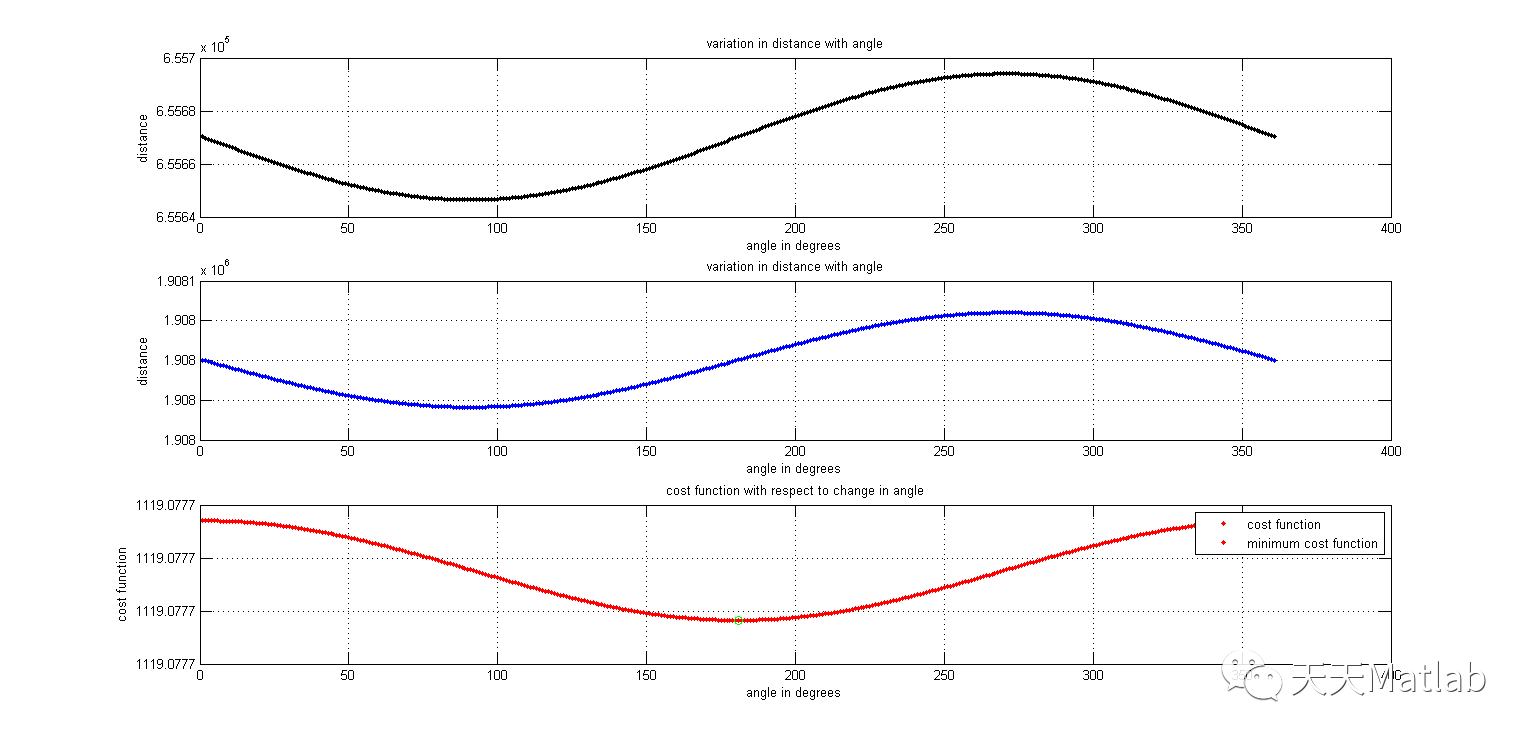
m=1;for i=0:pi/180:2*piif(p==1)D2(m)=sqrt((P(2,1)-d(1)*cos(i))^2+(P(2,2)-d(1)*sin(i))^2);D3(m)=sqrt((P(3,1)-d(1)*cos(i))^2+(P(3,2)-d(1)*sin(i))^2);e2(m)=abs(D2(m)-d(2));e3(m)=abs(D3(m)-d(3));subplot(3,1,1);plot(m,D2(m),'k.');hold ongrid onxlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')subplot(3,1,2);plot(m,D3(m),'b.');xlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')hold ongrid onelseif(p==2)D1(m)=sqrt((P(1,1)-d(1)*cos(i))^2+(P(1,2)-d(1)*sin(i))^2);D3(m)=sqrt((P(3,1)-d(1)*cos(i))^2+(P(3,2)-d(1)*sin(i))^2);e1(m)=abs(D1(m)-d(1));e3(m)=abs(D3(m)-d(3));subplot(3,1,1);plot(m,D1(m),'k.');hold ongrid onxlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')subplot(3,1,2);plot(m,D3(m),'b.');hold ongrid onxlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')elseD1(m)=sqrt((P(1,1)-d(1)*cos(i))^2+(P(1,2)-d(1)*sin(i))^2);D2(m)=sqrt((P(2,1)-d(1)*cos(i))^2+(P(2,2)-d(1)*sin(i))^2);e1(m)=abs(D1(m)-d(1));e2(m)=abs(D2(m)-d(2));subplot(3,1,1);plot(m,D1(m),'k.');hold ongrid onxlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')subplot(3,1,2);plot(m,D2(m),'b.');hold ongrid onxlabel('angle in degrees')ylabel('distance')title('variation in distance with angle')endm=m+1;end
⛳️ 运行结果
🔗 参考文献
[1] 贾子熙,吴成东,张云洲,等.智能建筑内一种基于WSN的声源定位方法[C]//2009中国自动化大会暨两化融合高峰会议.0[2023-10-10].
[2] 龚淼,冯友兵,卞建秀.基于移动锚节点的WSN节点定位方法[J].计算机科学, 2013, 40(11A):4.DOI:10.3969/j.issn.1002-137X.2013.z2.011.
[3] 严雨霞,冯友兵,孙小想.基于移动锚节点的WSN加权质心定位方法研究[J].物联网技术, 2015, 5(10):4.DOI:10.3969/j.issn.2095-1302.2015.10.010.
















 1228
1228











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











