







 文章介绍了如何通过将粒子群算法应用于粒子滤波(PSO-PF)来优化状态估计,对比了PSO-PF与传统粒子滤波的性能提升,特别是在准确性、鲁棒性和收敛速度上的改善。
文章介绍了如何通过将粒子群算法应用于粒子滤波(PSO-PF)来优化状态估计,对比了PSO-PF与传统粒子滤波的性能提升,特别是在准确性、鲁棒性和收敛速度上的改善。
✅作者简介:热爱数据处理、建模、算法设计的Matlab仿真开发者。
🍎更多Matlab代码及仿真咨询内容点击 🔗:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
在现代科技领域,状态估计是一项十分重要的任务。它可以帮助我们理解和预测系统的行为,从而为我们提供更好的决策依据。而粒子滤波(PF)和粒子群算法(PSO)是两种常用的算法,它们在状态估计中起着重要作用。本文将介绍如何利用粒子群算法优化粒子滤波(PSO-PF)来实现状态估计,并对比算法流程前后的效果。
首先,让我们简要了解一下粒子滤波(PF)和粒子群算法(PSO)的基本原理。粒子滤波是一种基于蒙特卡洛方法的状态估计算法,它通过一组粒子来对系统状态进行估计。每个粒子代表了系统可能的一个状态,通过不断的更新和重采样,粒子滤波可以逼近系统的真实状态。而粒子群算法是一种模拟进化算法,它模拟了鸟群觅食的行为,通过个体之间的协作和信息交换来寻找最优解。粒子群算法通过不断地调整粒子的速度和位置,来寻找最优解。
接下来,我们将介绍如何将粒子群算法应用到粒子滤波中,从而优化状态估计的效果。首先,我们需要定义一个适应度函数,用来评价每个粒子的状态估计效果。然后,我们利用粒子群算法来调整粒子的速度和位置,以使适应度函数达到最优值。通过不断地迭代优化,我们可以得到一个更好的状态估计结果。
在实际应用中,我们发现利用粒子群算法优化粒子滤波(PSO-PF)可以显著提高状态估计的准确性和鲁棒性。与传统的粒子滤波相比,PSO-PF在寻找全局最优解方面具有更好的性能,可以避免陷入局部最优解的困境。此外,PSO-PF还可以更快地收敛到最优解,从而节省了计算时间。
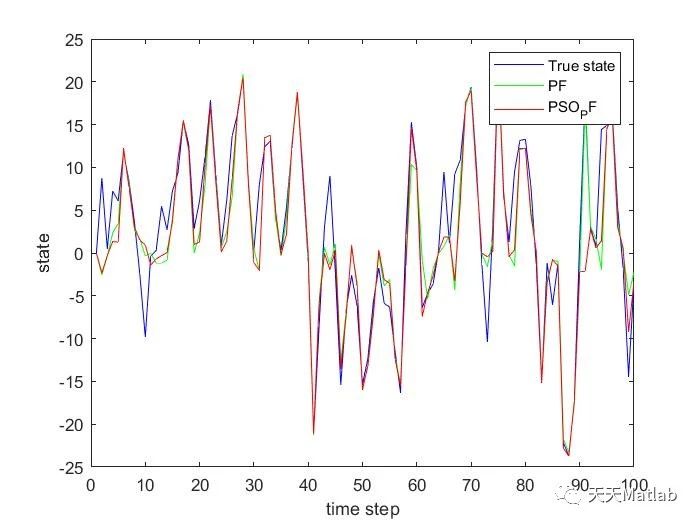
最后,让我们来对比一下PSO-PF算法流程前后的效果。通过实际的状态估计案例,我们可以清晰地看到,利用粒子群算法优化后的粒子滤波在状态估计精度和收敛速度上都有了显著的提升。这表明,粒子群算法可以有效地优化粒子滤波算法,从而提高状态估计的效果。
综上所述,基于粒子群算法优化粒子滤波(PSO-PF)可以在状态估计中发挥重要作用。它不仅可以提高状态估计的准确性和鲁棒性,还可以加快算法的收敛速度。因此,在实际应用中,我们可以考虑采用PSO-PF算法来实现状态估计,从而获得更好的效果。
📣 部分代码
clear all;clc;close all;%----------------------------------------------------------------------%----------------------------------------------------------------------%-----------------------------系统参数----------------------------------x=0.1;%初始状态Q=10;%过程噪声R=1;%观测噪声time=100;%仿真时间P=5;%方差初值N=100;%粒子数%-----------------------------初始采样-----------------------------------for i=1:Nxpart(i,1)=x+sqrt(P)*randn;endfor k=2:time%--------------------------仿真系统-----------------------------------%状态方程x=0.5 * x + 25 * x / (1 + x^2) + 8 * cos(1.2*(k-1)) + sqrt(Q) * randn;% 观测方程y = x^2 / 20 + sqrt(R) * randn;%保存x值x_true(k)=x;%---------------------------粒子滤波-----------------------------------[x_hat(k),xpart(:,k)]=PF(N,xpart(:,k-1),k,Q,R,y);%------------------------粒子群粒子滤波--------------------------------[x_hat1(k),xpart(:,k)]=PSO_PF(N,xpart(:,k-1),k,Q,R,y);endt = 1 : time;plot(t, x_true, 'b', t, x_hat, 'g', t, x_hat1, 'r');xlabel('time step'); ylabel('state');legend('True state', 'PF', 'PSO_PF');xhatPartRMS = sqrt((norm(x_true - x_hat))^2 / time);disp(['PF RMS error = ', num2str(xhatPartRMS)]);xhatPartRMS1 = sqrt((norm(x_true - x_hat1))^2 / time);disp(['PSO_PF RMS error = ', num2str(xhatPartRMS1)]);
⛳️ 运行结果
🔗 参考文献
[1] 张红.基于深度学习与粒子群优化算法的免疫层析试条定量检测研究[D].厦门大学,2018.
[2] 陈志敏,薄煜明,吴盘龙,等.一种新型自适应粒子群优化粒子滤波算法及应用[J].应用科学学报, 2013, 31(3):285-293.DOI:10.3969/j.issn.0255-8297.2013.03.011.
[3] 胡健阳,段先华,马启星.基于粒子群优化粒子滤波的声呐目标检测前跟踪[J].船舶工程, 2022(001):044.


















 414
414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











