







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
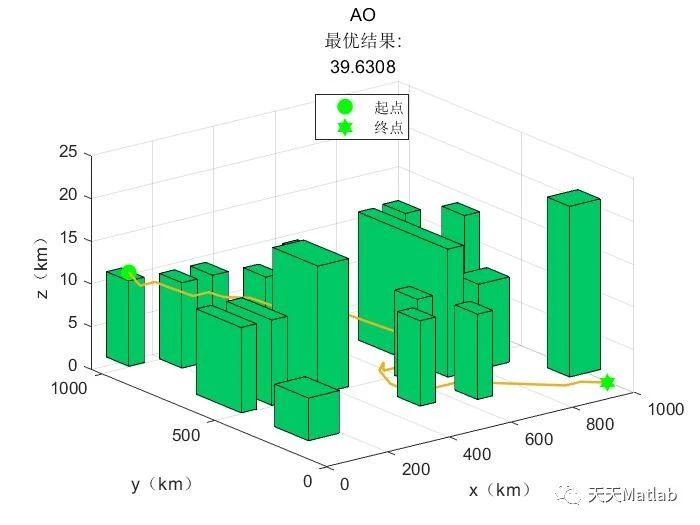
无人机技术的发展为许多领域带来了重大的改变和进步。无人机的应用范围越来越广泛,从军事到民用,从航拍到物流,无人机的应用越来越成熟。在无人机应用中,路径规划是一个非常重要的问题,它直接影响无人机的飞行效率和安全性。本文将介绍一种基于天鹰算法实现复杂地形下的无人机三维航迹规划算法流程。
一、无人机三维路径规划的背景
无人机的应用越来越广泛,但是在实际应用中,无人机的飞行环境是非常复杂的。无人机需要在不同的地形和环境中飞行,例如山区、森林、城市等。这些地形和环境对无人机的飞行路径规划提出了很高的要求。传统的路径规划算法无法满足无人机在复杂地形下的飞行需求,因此需要一种新的路径规划算法来解决这个问题。
二、天鹰算法简介
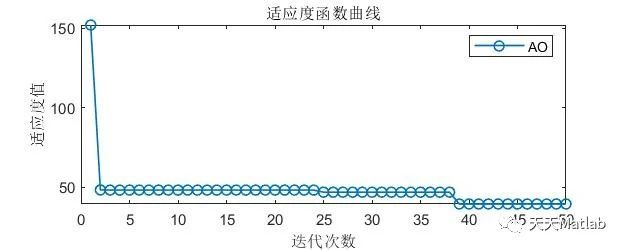
天鹰算法是一种基于群体智能的优化算法,它是由模拟鸟群捕食行为而来。天鹰算法具有全局搜索能力和高效性,能够在多维优化问题中找到全局最优解。天鹰算法的优点是可以处理非线性、非凸、多峰和高维优化问题。
三、无人机三维航迹规划算法流程
无人机三维航迹规划算法流程如下:
-
确定起点和终点
首先,需要确定无人机的起点和终点。起点和终点可以通过人工设定或者无人机自动识别得到。
-
建立地形模型
其次,需要建立无人机飞行区域的地形模型。地形模型可以通过激光雷达、卫星遥感等技术获取。
-
确定障碍物和禁飞区域
在地形模型的基础上,需要确定无人机飞行区域的障碍物和禁飞区域。障碍物和禁飞区域可以通过人工标注或者无人机自动识别得到。
-
生成初始路径
根据起点和终点,使用天鹰算法生成初始路径。初始路径是一条从起点到终点的直线路径。
-
优化路径
在初始路径的基础上,使用天鹰算法对路径进行优化。优化的目标是使路径长度最短,同时避开障碍物和禁飞区域。
-
生成最终路径
通过不断优化,得到最终路径。最终路径是一条避开障碍物和禁飞区域的最短路径。
-
无人机飞行
将最终路径输入无人机,让无人机按照路径飞行。
四、总结
本文介绍了一种基于天鹰算法实现复杂地形下的无人机三维航迹规划算法流程。该算法可以有效地解决无人机在复杂地形下的路径规划问题,具有全局搜索能力和高效性。未来,随着无人机技术的不断发展,路径规划算法将会越来越重要。
📣 部分代码
function DrawPic(result1,data,str)figureplot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)hold onplot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',8)plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',1.5,...'MarkerEdgeColor','g',...'MarkerFaceColor','g',...'MarkerSize',10)for i=1:data.numObstaclesx=1+data.Obstacle(i,1);y=1+data.Obstacle(i,2);z=1+data.Obstacle(i,3);long=data.Obstacle(i,4);wide=data.Obstacle(i,5);pretty=data.Obstacle(i,6);x0=ceil(x/data.unit(1))*data.unit(1);y0=ceil(y/data.unit(2))*data.unit(2);z0=ceil(z/data.unit(3))*data.unit(3);long0=ceil(long/data.unit(1))*data.unit(1);wide0=ceil(wide/data.unit(2))*data.unit(2);pretty0=ceil(pretty/data.unit(3))*data.unit(3);[V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);endlegend('起点','终点','location','north')grid on%axis equalxlabel('x(km)')ylabel('y(km)')zlabel('z(km)')title([str, '最优结果:', num2str(result1.fit)])% figure% plot3(data.S0(:,1)*data.unit(1),data.S0(:,2)*data.unit(2),data.S0(:,3)*data.unit(3),'o','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% hold on% plot3(data.E0(:,1)*data.unit(1),data.E0(:,2)*data.unit(2),data.E0(:,3)*data.unit(3),'h','LineWidth',2,...% 'MarkerEdgeColor','r',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% plot3(result1.path(:,1).*data.unit(1),result1.path(:,2).*data.unit(2),result1.path(:,3).*data.unit(3),'-','LineWidth',2,...% 'MarkerEdgeColor','k',...% 'MarkerFaceColor','r',...% 'MarkerSize',10)% for i=1:data.numObstacles% x=1+data.Obstacle(i,1);% y=1+data.Obstacle(i,2);% z=1+data.Obstacle(i,3);% long=data.Obstacle(i,4);% wide=data.Obstacle(i,5);% pretty=data.Obstacle(i,6);%% x0=ceil(x/data.unit(1))*data.unit(1);% y0=ceil(y/data.unit(2))*data.unit(2);% z0=ceil(z/data.unit(3))*data.unit(3);% long0=ceil(long/data.unit(1))*data.unit(1);% wide0=ceil(wide/data.unit(2))*data.unit(2);% pretty0=ceil(pretty/data.unit(3))*data.unit(3);% [V,F] = DrawCuboid(long0, wide0, pretty0, x0,y0,z0);% end% legend('起点','终点','location','north')% grid on% xlabel('x(km)')% ylabel('y(km)')% zlabel('z(km)')% title([str, '最优结果:', num2str(result1.fit)])end
⛳️ 运行结果

🔗 参考文献
[1] 张涛,李少波,张安思,等.基于改进人工鱼群算法的复杂地貌无人机三维路径规划[J].科学技术与工程, 2023, 23(10):4433-4439.
[2] 杜晓玉,郭启程,李茵茵,et al.城市环境下基于改进鲸鱼算法的无人机三维路径规划方法[J].计算机科学, 2021, 48(12):8.DOI:10.11896/jsjkx.201000021.
[3] 郭启程杜晓玉张延宇周毅.基于改进鲸鱼算法的无人机三维路径规划[J].计算机科学, 2021, 48(12):304-311.
















 622
622











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











