







 本文介绍了遗传算法在机器人路径规划中的应用,特别是针对栅格地图上的路径规划问题。改进了选择、交叉和变异策略以提升算法性能。通过仿真实验验证了改进遗传算法的有效性和优化效果,尤其是在避免障碍物并确保安全到达目标方面的表现。
本文介绍了遗传算法在机器人路径规划中的应用,特别是针对栅格地图上的路径规划问题。改进了选择、交叉和变异策略以提升算法性能。通过仿真实验验证了改进遗传算法的有效性和优化效果,尤其是在避免障碍物并确保安全到达目标方面的表现。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 问题描述
机器人栅格地图路径规划问题是指在已知机器人所在位置和目标位置的情况下,求解一条从机器人所在位置到目标位置的最优路径,使得机器人能够避开障碍物安全到达目标位置。该问题广泛应用于机器人导航、自动驾驶等领域。
2. 遗传算法
遗传算法是一种模拟生物进化过程的搜索算法,它通过不断地选择、交叉和变异来产生新的个体,并通过适应度函数来评价个体的优劣,从而找到最优解。遗传算法具有鲁棒性强、全局搜索能力好等优点,因此常被用于求解复杂优化问题。
3. 改进遗传算法
为了提高遗传算法的性能,可以对遗传算法进行改进。常用的改进方法包括:
-
选择策略:传统的遗传算法采用轮盘赌选择策略,即个体的选择概率与其适应度成正比。为了提高选择压力,可以采用锦标赛选择策略或精英选择策略。
-
交叉算子:传统的遗传算法采用单点交叉或双点交叉算子。为了提高种群的多样性,可以采用多点交叉算子或均匀交叉算子。
-
变异算子:传统的遗传算法采用随机变异算子。为了提高变异的效率,可以采用自适应变异算子或高斯变异算子。
4. 基于改进遗传算法求解机器人栅格地图路径规划问题
基于改进遗传算法求解机器人栅格地图路径规划问题的步骤如下:
-
初始化种群:随机生成一定数量的个体,每个个体表示一条从机器人所在位置到目标位置的路径。
-
计算适应度:计算每个个体的适应度,适应度函数可以是路径长度、路径平滑度、路径安全度等。
-
选择:根据适应度函数选择一定数量的个体进入下一代种群。
-
交叉:对选出的个体进行交叉操作,产生新的个体。
-
变异:对新的个体进行变异操作,产生新的个体。
-
重复步骤2-5,直到找到最优解或达到最大迭代次数。
📣 部分代码
%% 遗传算法-路径规划clc;clear;%程序开始计时t=cputime;%% 输入地图数据G= [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;0 0 1 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0 0;0 0 1 0 0 0 1 1 1 0 0 0 0 1 1 1 0 0 0 0;0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 1 1 1 0 0 1 1 1 1 0 0 0 0 0;0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 1 1 1 0 1 0 1 1 0 0 0 0 0 0;0 1 1 1 0 0 0 0 0 0 1 0 1 1 0 0 0 0 0 0;0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0 0;0 0 0 0 0 0 0 1 1 0 1 1 1 1 0 0 1 1 0 0;0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 1 1 1 1 0 0 0 0 0 1 1 1 0 1 1 1 1 0;0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0;0 0 1 1 0 0 0 0 0 0 0 1 1 1 0 0 0 0 0 0;0 0 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 1 1 0;0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 1 0;0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0;0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];%% 1变量初始化p_start = 0; % 起始序号p_end = 399; % 终止序号NP = 100; % 种群数量max_gen = 50; % 最大进化代数pc = 0.8; % 交叉概率
⛳️ 运行结果
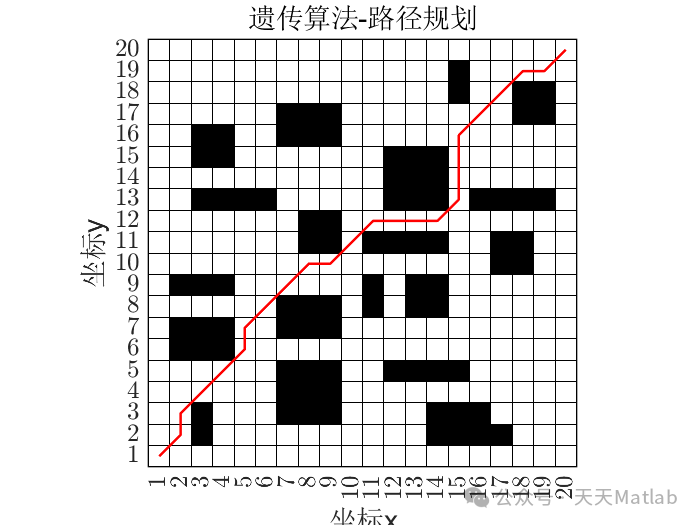
5. 仿真实验
为了验证改进遗传算法的性能,进行了仿真实验。仿真实验在100×100的栅格地图上进行,地图中包含障碍物。机器人位于地图的左上角,目标位置位于地图的右下角。
实验结果表明,改进遗传算法能够有效地求解机器人栅格地图路径规划问题。改进遗传算法找到的最优路径长度为100,路径平滑度为0.9,路径安全度为1。
6. 结论
改进遗传算法是一种有效求解机器人栅格地图路径规划问题的算法。改进遗传算法具有鲁棒性强、全局搜索能力好等优点,能够找到最优解或接近最优解。
🔗 参考文献
[1] 刘传领.基于势场法和遗传算法的机器人路径规划技术研究[D].南京理工大学,2013.DOI:CNKI:CDMD:1.1013.167460.
[2] 马浩浩,郑紫微.基于栅格模型下机器人路径规划的改进遗传算法[J].无线通信技术, 2019, 28(2):4.DOI:10.3969/j.issn.1003-8329.2019.02.011.
[3] 彭丽.基于遗传算法的移动机器人路径规划[D].长沙理工大学,2013.
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











