





 本文探讨了控制系统中稳定性的重要性,介绍了三种不同系统的状态,并说明了如何通过单位冲击获取传递函数。此外,还强调了系统稳定的条件——极点必须位于复平面的左半部分。
本文探讨了控制系统中稳定性的重要性,介绍了三种不同系统的状态,并说明了如何通过单位冲击获取传递函数。此外,还强调了系统稳定的条件——极点必须位于复平面的左半部分。
对于一个控制系统来说,稳定性是第一位的
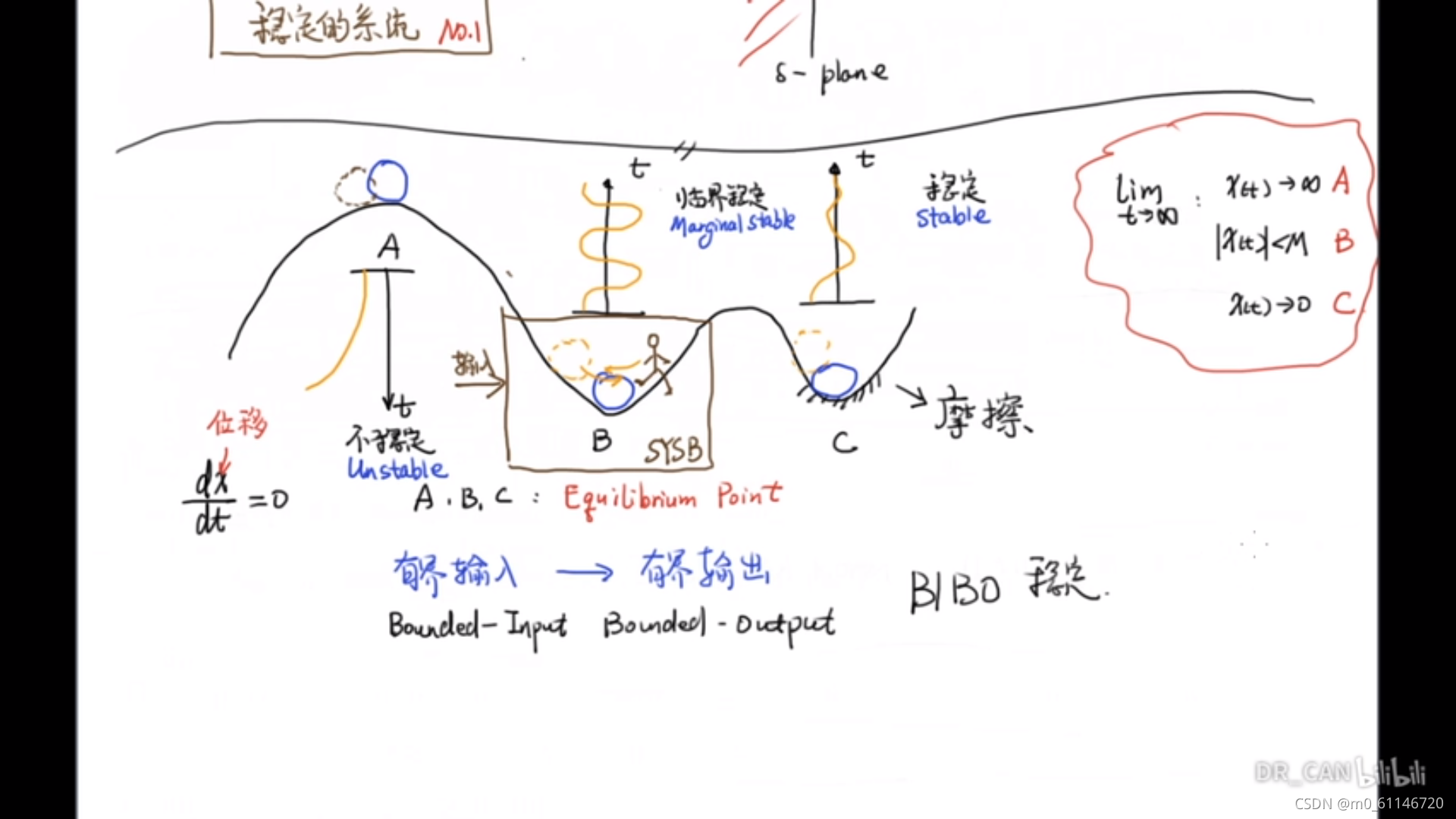
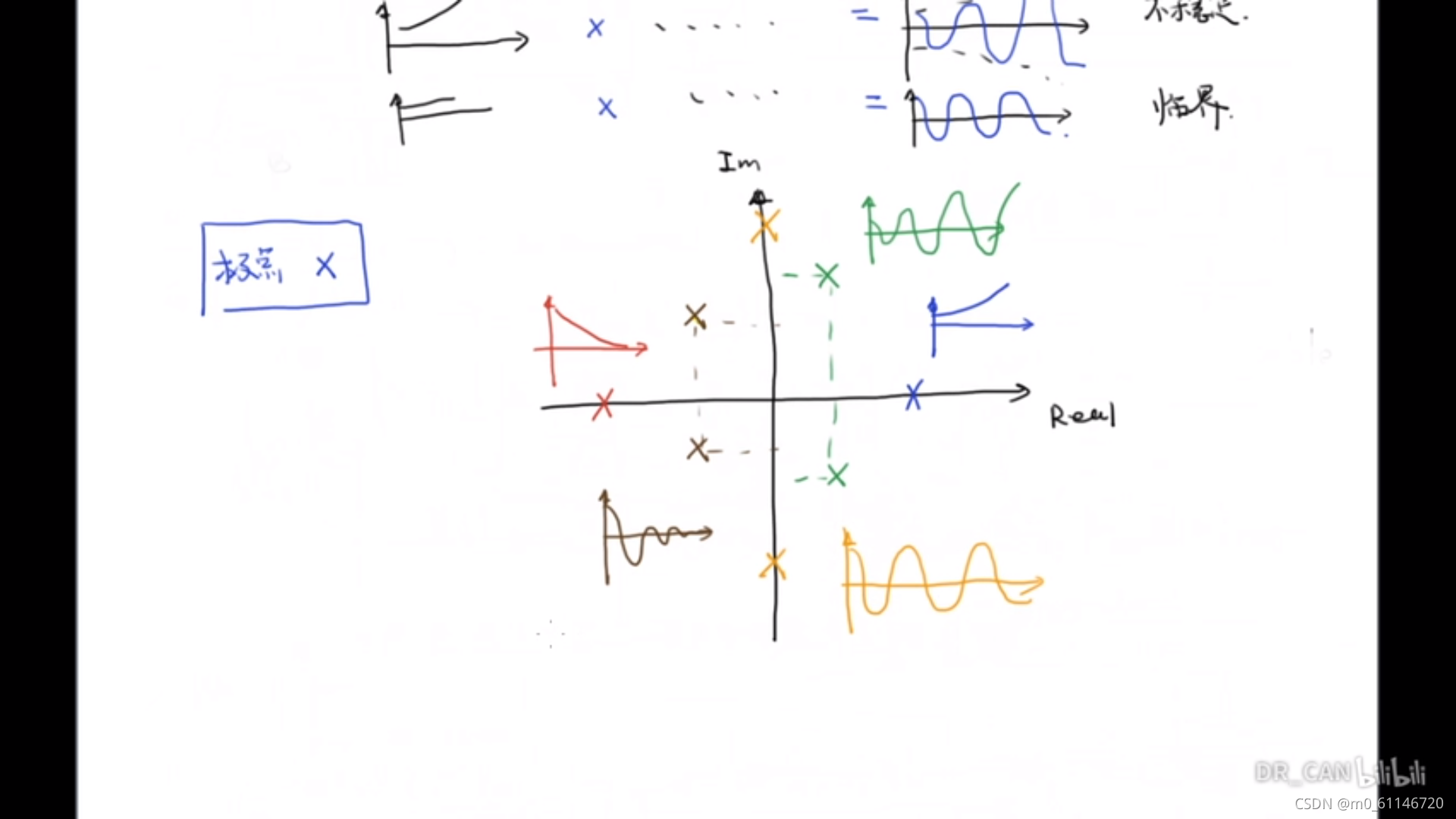
三种不同的系统的状态;大部分系统都是有界输入,有界输出
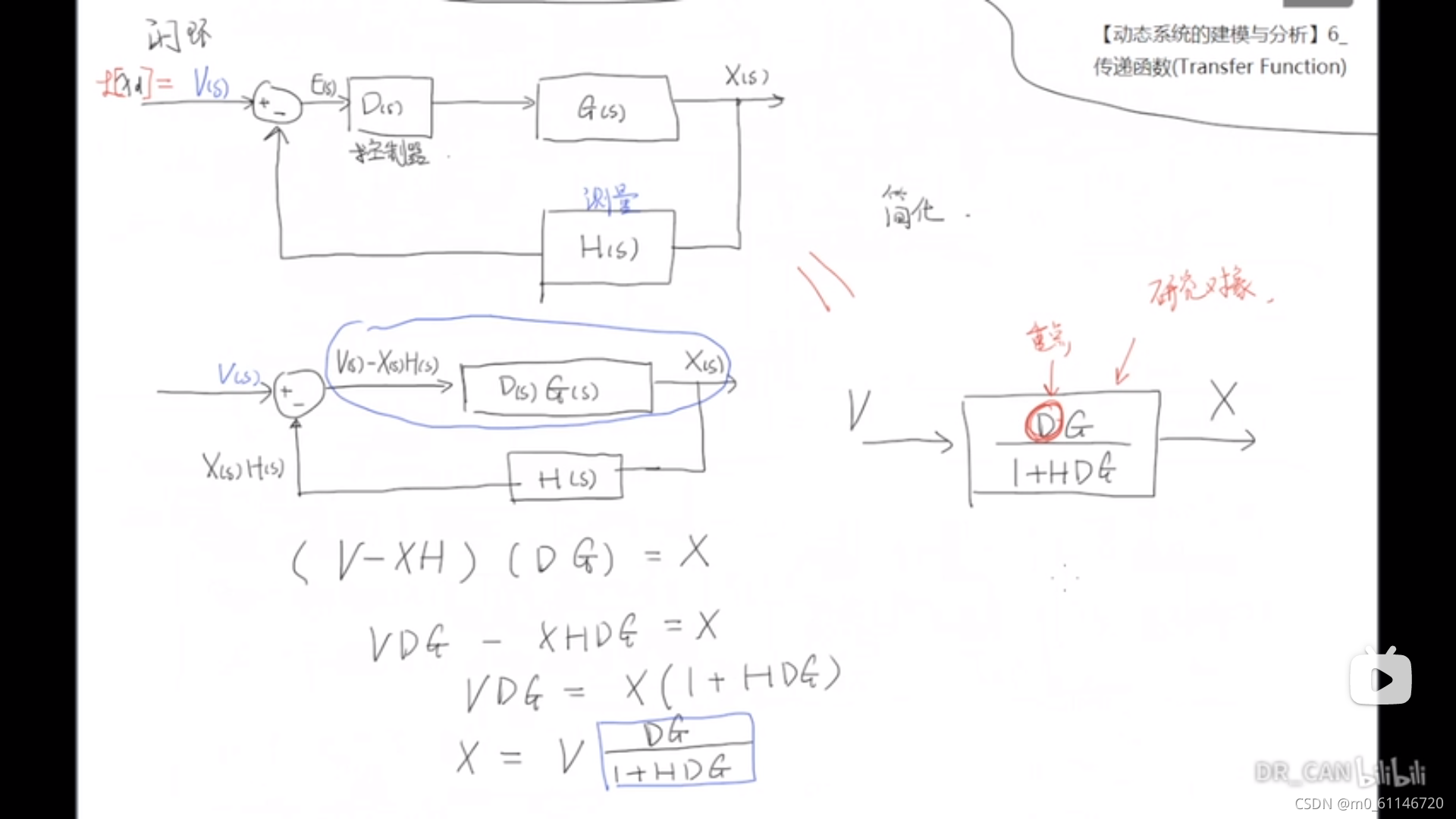
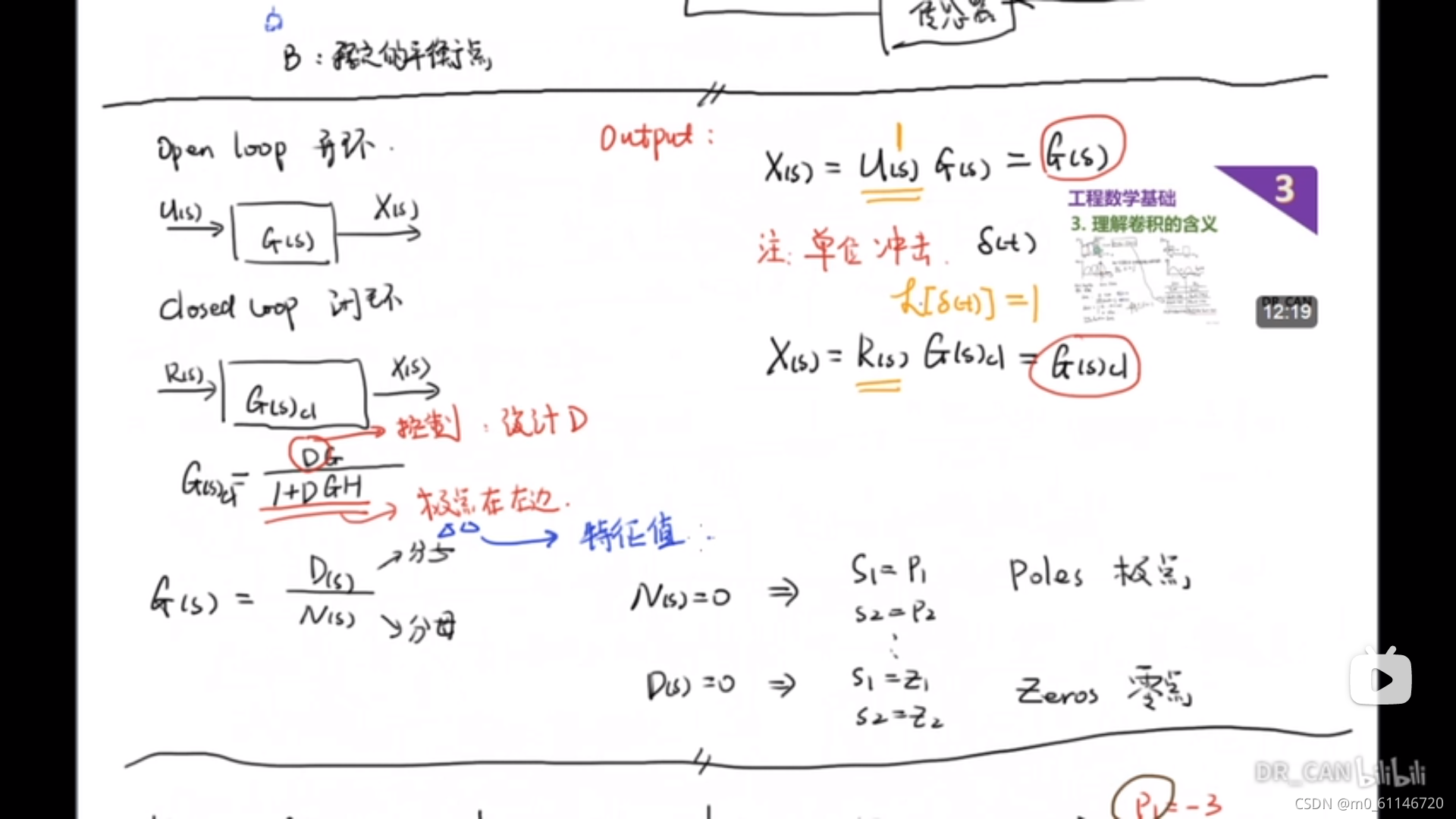
通过给系统施加一个单位冲击(也就是一个扰动,t-0,L(fai(t))=1,可求其传递函数
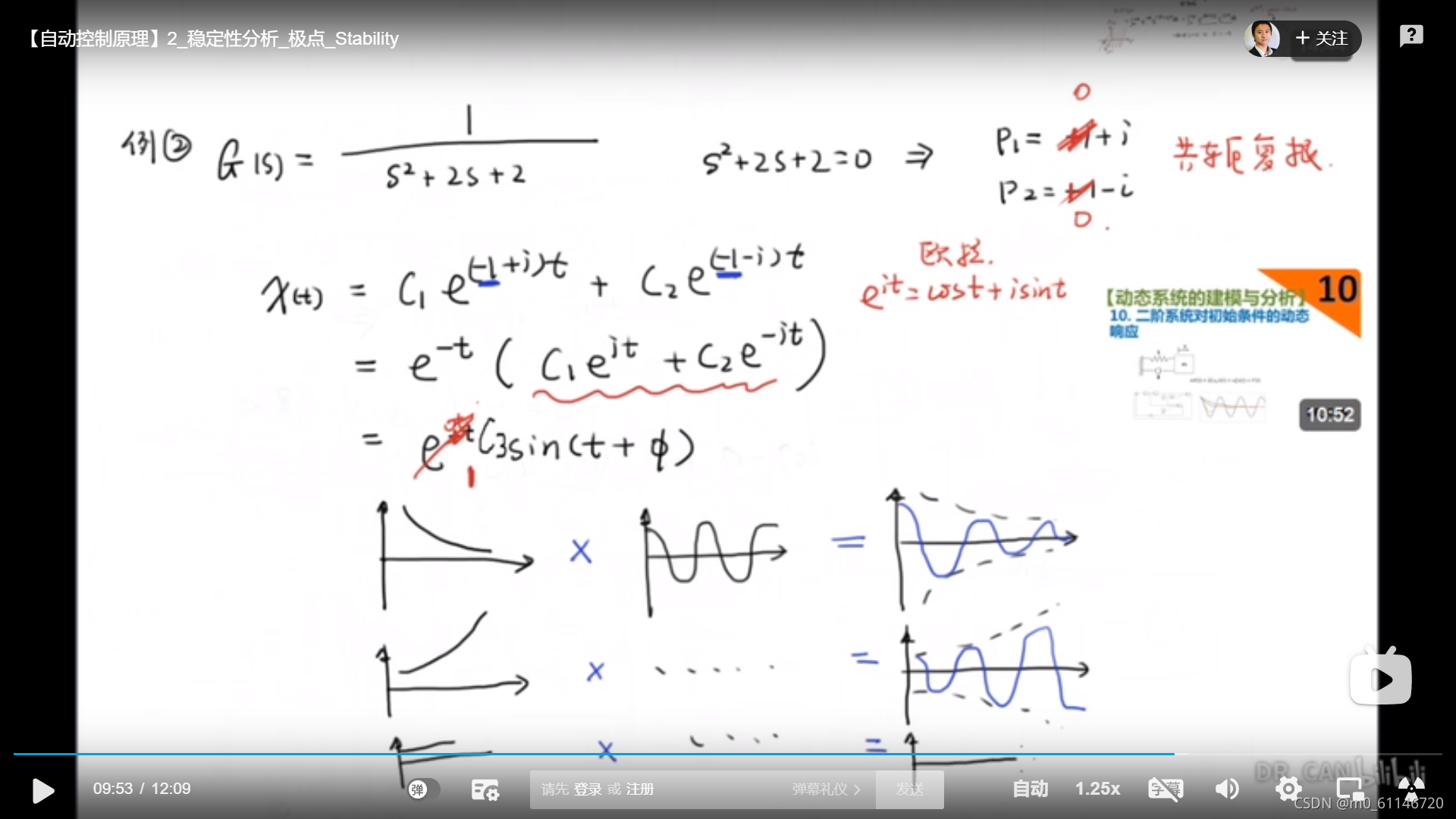
系统稳定要求极点在复平面的左半边,即实部小于0

对于一个控制系统来说,稳定性是第一位的
三种不同的系统的状态;大部分系统都是有界输入,有界输出
通过给系统施加一个单位冲击(也就是一个扰动,t-0,L(fai(t))=1,可求其传递函数
系统稳定要求极点在复平面的左半边,即实部小于0

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























