






 文章详细描述了在CloudCompare中,如何通过PLY文件加载数据并设置点云颜色,涉及关键代码如`ply_read`和`ply_set_read_cb`,以及如何通过VBOs和ScalarField来管理颜色数据的传输和渲染。
文章详细描述了在CloudCompare中,如何通过PLY文件加载数据并设置点云颜色,涉及关键代码如`ply_read`和`ply_set_read_cb`,以及如何通过VBOs和ScalarField来管理颜色数据的传输和渲染。
关键代码:
数据的加载过程
CC_FILE_ERROR PlyFilter::loadFile(const QString& filename, const QString& inputTextureFilename, ccHObject& container, LoadParameters& parameters)
{
//设置点云读取函数,对不同的属性类型会有不同的读取方式
ply_set_read_cb(ply, pointElements[pp.elemIndex].elementName, pp.propName, scalar_cb, sf, 1);
...
//通过下面函数调用PointCloudTpl::addPoint,为成员变量m_points添加数据
success = ply_read(ply);
}
CloudCompare点云颜色的设置主要有三种设置方式(阶段):
- 初始化打开的时候,例如数据带rgb或者intensity属性的时候
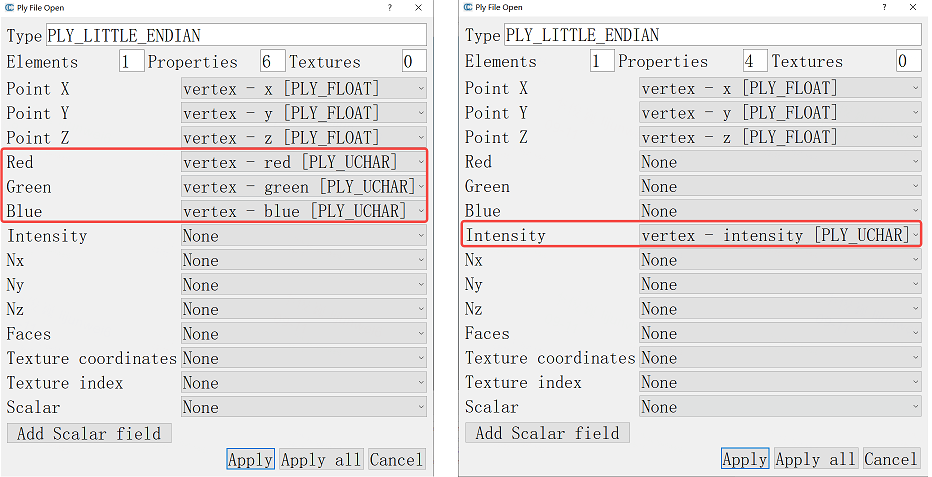
使用这种方式,点云的颜色在读取点property的时候就决定了,看关键代码调用:
static int ply_read_list_property(p_ply ply, p_ply_element element, p_ply_property property, p_ply_argument argument){
//使用函数指针调用,传入argument->value通过调用对应类型的函数(跳转1或者跳转2等)赋值
if (!handler(ply, &argument->value)) {
ply_ferror(ply, "Error reading '%s' of '%s' number %d",
property->name, element->name, argument->instance_index);
return 0;
}
//一样是函数指针,对应ply_set_read_cb设置的方法(跳转3或者跳转4等)
if (read_cb && !read_cb(argument)) {
ply_ferror(ply, "Aborted by user");
return 0;
}
return 1;
}
//跳转1
static int ibinary_float32(p_ply ply, double *value) {
float float32;
if (!ply->idriver->ichunk(ply, &float32, sizeof(float32))) return 0;
*value = float32;
return 1;
}
//跳转2
static int ibinary_uint8(p_ply ply, double *value) {
t_ply_uint8 uint8;
if (!ply->idriver->ichunk(ply, &uint8, 1)) return 0;
*value = uint8;
return 1;
}
//无论是否跳转3或者4,都必须设置点坐标
static int vertex_cb(p_ply_argument argument){
//ccPointCloud* cloud 调用方法为m_points添加所有点云坐标
cloud->addPoint((s_Point + s_Pshift).toPC());
}
//跳转3 存在可供rgb映射的数值,设置rgb映射
static int rgb_cb(p_ply_argument argument)
//跳转4 对应上图设置intensity打开,因为intensity只有一个数值,所以cc让其映射到rgb全为intensity的grep_cb
static int grey_cb(p_ply_argument argument)
//无论跳转3还是4,只要设置颜色就需要到跳转到下面函数上
void ccPointCloud::addColor(const ccColor::Rgba& C){
//关键成员变量m_rgbaColors登场,后期将作为glcolorpoint参数
m_rgbaColors->emplace_back(C);
}
数据做好准备后,在函数ccPointCloud::drawMeOnly中调用ccPointCloud::updateVBOs,
void ccPointCloud::drawMeOnly(CC_DRAW_CONTEXT& context)
{
//updateVBOs跳转
bool useVBOs = context.useVBOs && !toDisplay.indexMap ? updateVBOs(context, glParams) : false;
glChunkColorPointer(context, k, toDisplay.decimStep, useVBOs);
glFunc->glDrawArrays(GL_POINTS, 0, static_cast<GLsizei>(chunkSize));
}
bool ccPointCloud::updateVBOs(const CC_DRAW_CONTEXT& context, const glDrawParams& glParams)
{
//m_rgbaColors在此被送到缓存VBO中
m_vboManager.vbos[chunkIndex]->write(m_vboManager.vbos[chunkIndex]->rgbShift, ccChunk::Start(*m_rgbaColors, chunkIndex), sizeof(ColorCompType) * chunkSize * 4);
}
需要注意地是,如果除了xyz选择了,但其他都不选地情况下关键代码*glChunkColorPointer(context, k, toDisplay.decimStep, useVBOs);*是不走的,也就是说不启用顶点数组的颜色数据,OpenGL会使用默认颜色(通常是白色)渲染所有点。
- 使用Scala Filed(SF),数据初始化配置时候添加Scalar,将某类属性作为标量,也就是颜色的标尺。
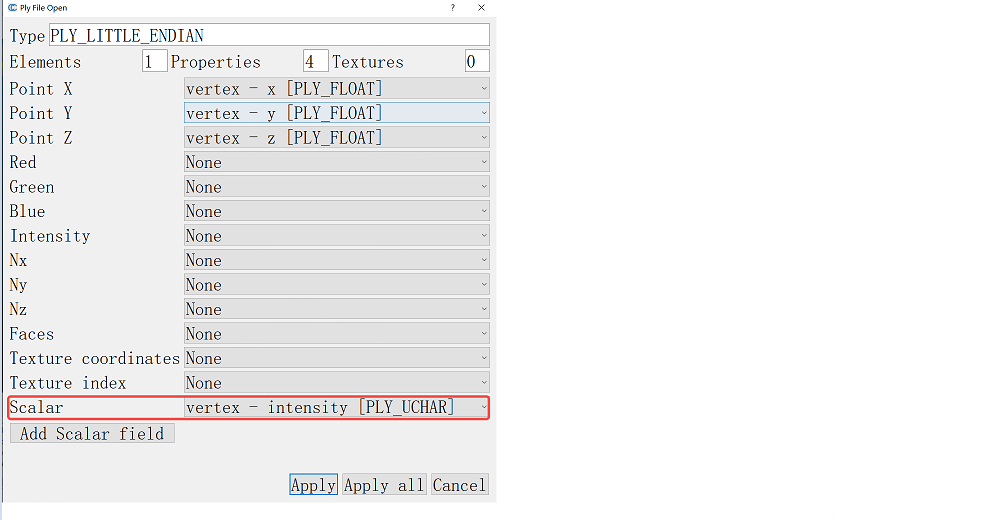
和ply_read_list_property很类似,通过函数指针调用
static int scalar_cb(p_ply_argument argument)
{
//根据Scale指定的属性,比如本次的intensity,经过转换直接变为
ScalarType scal = static_cast<ScalarType>(ply_get_argument_value(argument));
sf->setValue(instance_index,scal);
return 1;
}
剩下的点云颜色设置和数据传入vbos中相关的代码都在函数ccPointCloud::drawMeOnly中
其中chunkSize的大小就是根据前面读取的点云多少获取的。所有点云的颜色数据最终传入vbos中
bool ccPointCloud::updateVBOs(const CC_DRAW_CONTEXT& context, const glDrawParams& glParams)
{
//s_rgbBuffer4ub当前所有点的颜色组成的数组,每个点都包含rgba,每个元素8位,刚好可代表255
//m_vboManager.sourceSF 记录当前scalar Fields中顶点某类属性数据,xyz或者intensity
//_sf 一个顶点的一个属性,double类型
//关键函数getColor,通过属性值在预设好的ccColorScale中查到对应的颜色
ColorCompType* _sfColors = s_rgbBuffer4ub;
ScalarType* _sf = ccChunk::Start(*m_vboManager.sourceSF, chunkIndex);
for (int j = 0; j < chunkSize; j++, _sf++)
{
//we need to convert scalar value to color into a temporary structure
const ccColor::Rgb* col = _sf ? m_vboManager.sourceSF->getColor(*_sf) : nullptr;
if (!col)
{
col = &ccColor::lightGreyRGB;
*_sfColors++ = col->r;
*_sfColors++ = col->g;
*_sfColors++ = col->b;
*_sfColors++ = ccColor::MAX;
}
//then send them in VRAM
//通过vboManager管理器把颜色数据传入VRAM
m_vboManager.vbos[chunkIndex]->write(m_vboManager.vbos[chunkIndex]->rgbShift, s_rgbBuffer4ub, sizeof(ColorCompType) * chunkSize * 4);
}
在函数drawMeOnly中,更新vbo后需要进一步告知如何处理顶点数据和颜色数据,这和官网介绍的OpneGL使用可编程shader处理数据有区别。
void ccPointCloud::drawMeOnly(CC_DRAW_CONTEXT& context)
{
glFunc->glEnableClientState(GL_VERTEX_ARRAY);
glFunc->glEnableClientState(GL_COLOR_ARRAY);
//points 函数内部调用glVertexPointer
glChunkVertexPointer(context, k, toDisplay.decimStep, useVBOs);
//SF colors 函数内部调用glColorPointer
glChunkSFPointer(context, k, toDisplay.decimStep, useVBOs);
glFunc->glDrawArrays(GL_POINTS, 0, static_cast<GLsizei>(chunkSize));
}
现在重点手撕下函数ccPointCloud::updateVBOs中通过Scale Field获取颜色。
查看调用
//传入的value首先需要经过正则化
getColorByRelativePos(normalize(value), m_colorRampSteps, m_showNaNValuesInGrey ? &ccColor::lightGreyRGB : nullptr);
//normalize(value)函数相对简单,除了指定指数log变化以外,大部分都走非对称或者对称逻辑。在normalize函数中根据色彩饱和度进行调整。
//需要注意的是
//在函数getColorByRelativePos中调用getColorByIndex
inline const ccColor::Rgb& getColorByIndex(unsigned index) const
{
assert(m_updated && index < MAX_STEPS);
return m_rgbaScale[index];
}
//m_rgbaScale是一个在打开cc时,通过ccColorScalesManager::Create创建的不同类型的ccColorScale的成员变量,该成员共有1024位的
//在ccColorScalesManager::Create中主要
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了pandas的使用,而pandas提供了大量能使我们快速便捷地处理数据的函数和方法。

















 1064
1064

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









