









目录
例题解析:
基本概念:
约束优化问题的一般模型:
其中, ,
,
均是实值连续函数,且具有二阶连续偏导数。
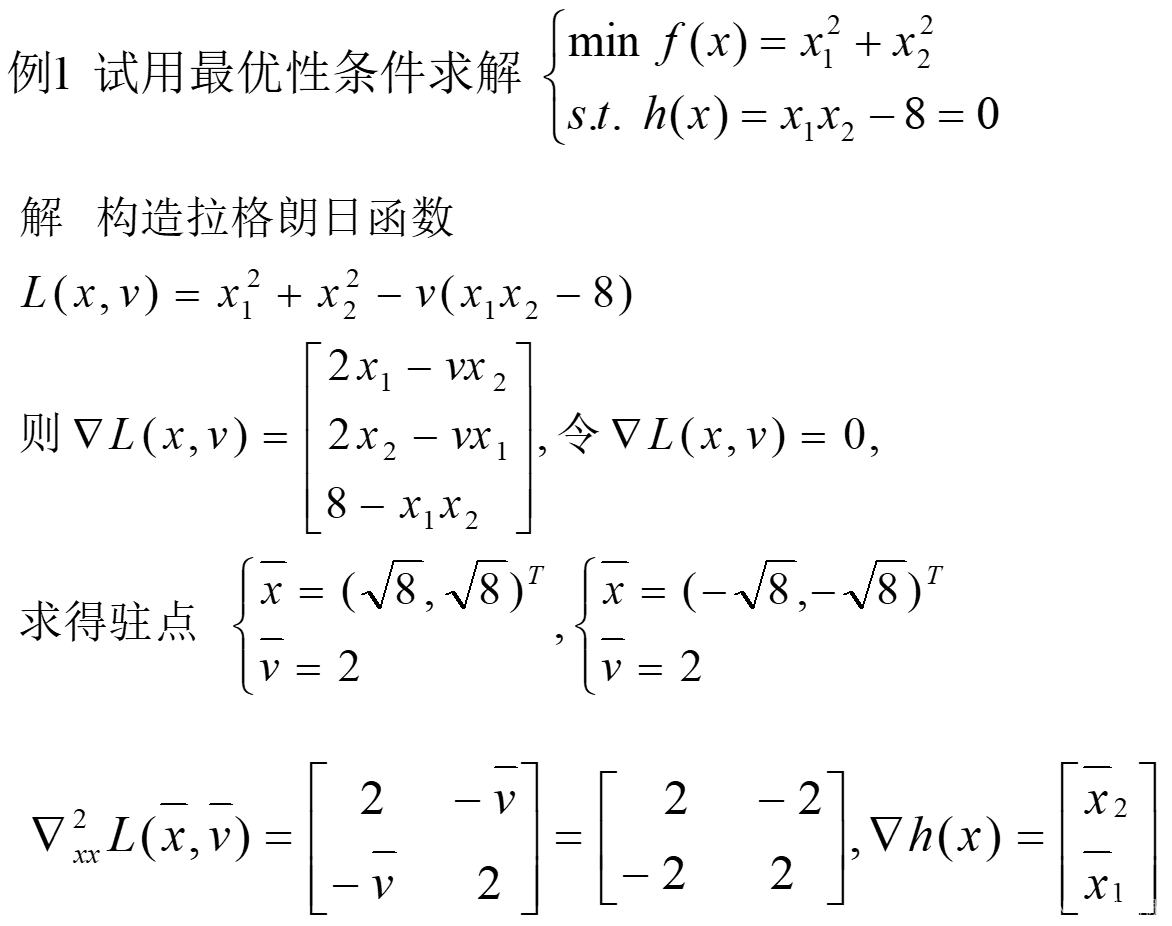
等式约束最优化的最优性条件:
一般形式:
其中 :
,
下面给出定理:
定理1:在等式约束优化问题中,设 在点
处可微,
在
处具有一阶连续偏导数,并且向量组
线性无关,如果
是局部极小点,则存在实数
,
,使得
。
定理2:设 :
和
在
处具有二阶连续偏导数,如果存在
,使得
,并且
,只要
,就有
,则
是上述问题的严格局部极小值。
例题解析:
不等式约束最优化的最优性条件:
一般形式:
其中 :
,
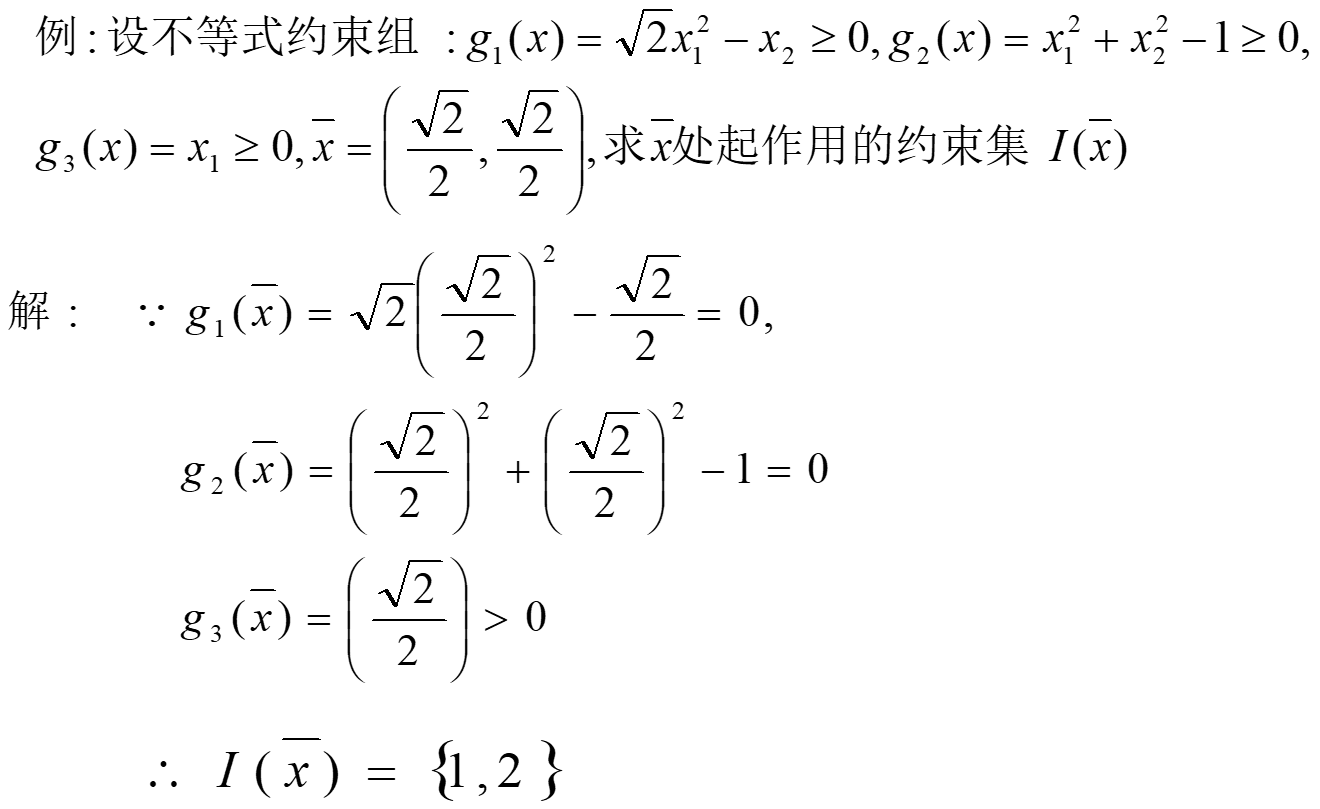
将不等式约束分为两种情况:
(1),称为第 i 个不等式约束在
处起作用的约束(紧约束);
(2),称为第 i 个不等式约束在
处不起作用的约束(松约束);
用 表示在可行点处起作用的指标集,即
。
参考下面例题,可以了解 的作用。
对于起作用的约束,当点沿着某个方向稍微离开 时,仍能满足这些约束(松约束);而沿另一个方向离开
时,不论步长多么小,都会违背这些约束(紧约束)。
Fritz-John 条件:
满足 Fritz-John 条件的点成为 Fritz-John 点。
K-T 条件:
与Fritz-John 条件相比,如果 ,且
线性无关,则可得到 K-T 点。
同时需满足松紧条件:
例题解析:
下面我来用两个例题来探究常见的如何判断 K-T 点和求 K-T 点:
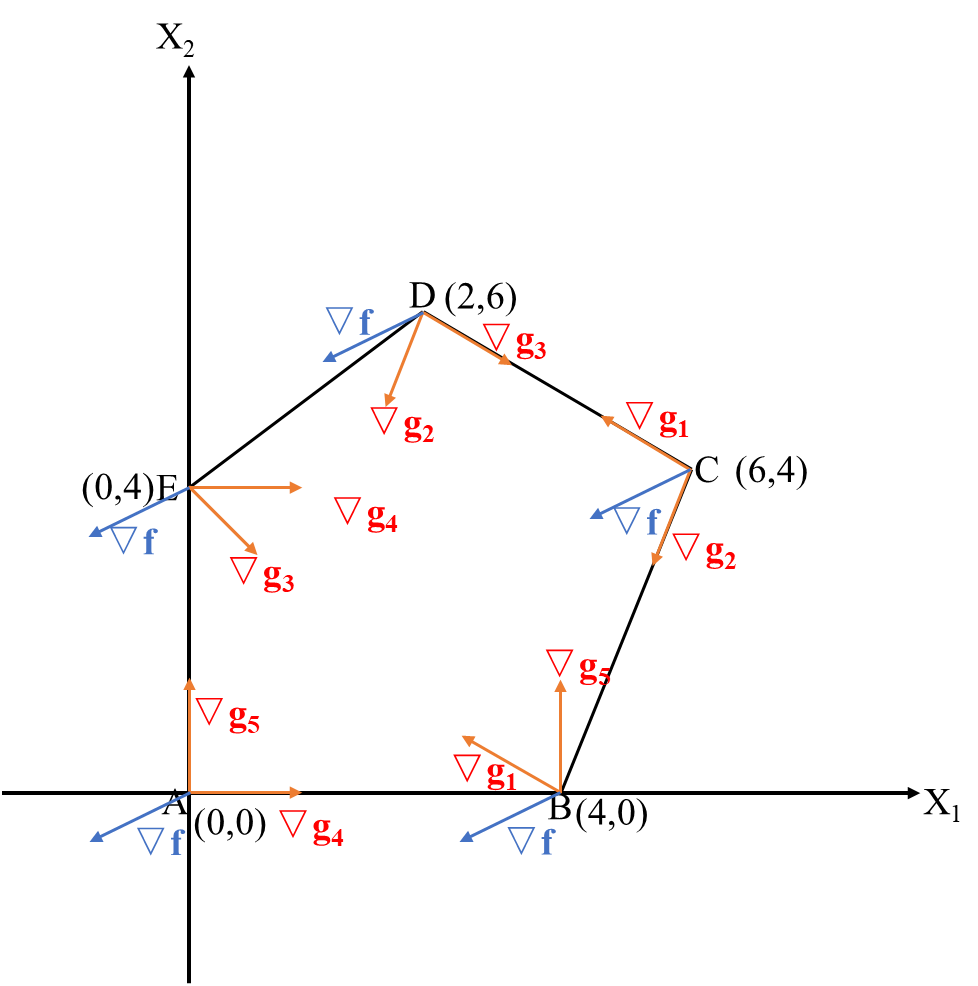
例题1:求以下 K-T 点
解:
画出约束条件所规划的可行域,同时在顶点处画出对应约束条件的向量,与 进行比较,由在起作用的约束条件所形成的可行凸锥内,若
在可行凸锥内,则可视作 K-T 点,可以看出,C 为 K-T 点。
例题2:求以下 K-T 点
解:
构造拉格朗日函数:
下面对 进行判断,再结合松紧定理,推断出 K-T点:
| 0 | 0 | 无解 | |
| 0 | + | 1 | 0 |
| + | 0 | 无解 | |
| + | + | 无解 | |
所有,K-T 点为:(1,0)
(行文中若有纰漏,希望大家指正)


















 966
966

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











