







一、GD25Qxx芯片简单介绍
W25Q128是华邦公司推出的一款SPI接口的NOR Flash芯片,其存储空间为128Mbit,相当于16M字节。W25Q128V芯片是串行闪存,可以通过标准/两线/四线SPI控制。W25Q128一次最多可编程256个字节。页面可以按扇区擦除、块擦除、整个芯片擦除。
W25Q128 的擦写周期多达 10W 次,具有 20 年的数据保存期限,支持电压为 2.7~3.6V,W25Q128 支持标准的 SPI,还支持双输出/四输出的 SPI,最大 SPI 时钟可以到 80Mhz(双输出时相当于 160Mhz,四输出时相当于 320M)。
- W25Q64存储容量共 :64M-bit/ 8M-byte
- W25Q128存储容量共 :128M-bit / 16M-Byte
- 页:256 Bytes
- 扇区:16 Pages(4KB)
- 块:16 Sector(64KB)
二、W25QXX芯片引脚说明

- 第1脚CS是SPI总线的片选使能接口,SPI总线支持在一条总线上连接多个芯片,为了区分当前通信的是哪个芯片,就为每个芯片连接一个独立的CS片选接口,单片机想和哪个芯片通信,就向哪个芯片的CS引脚输出低电平。
- 第2脚D0是SPI总线的数据输出接口。
- 第3脚WP是硬件写保护接口,当向此引脚输入低电平,芯片将禁止写入数据。反之,可正常写入数据。
- 第4脚GND是公共地。
- 第5脚DI是SPI总线的数据输入接口。
- 第6脚CLK是SPI总线的时钟输入接口。
- 第7脚HOLD是状态保持接口。当向此引脚输入低电平,芯片将禁止任何操作,当向此引脚输入高电平,可正常操作芯片。
- 第8脚VCC是电源供电接口,输入2.7-3.6V的电源。
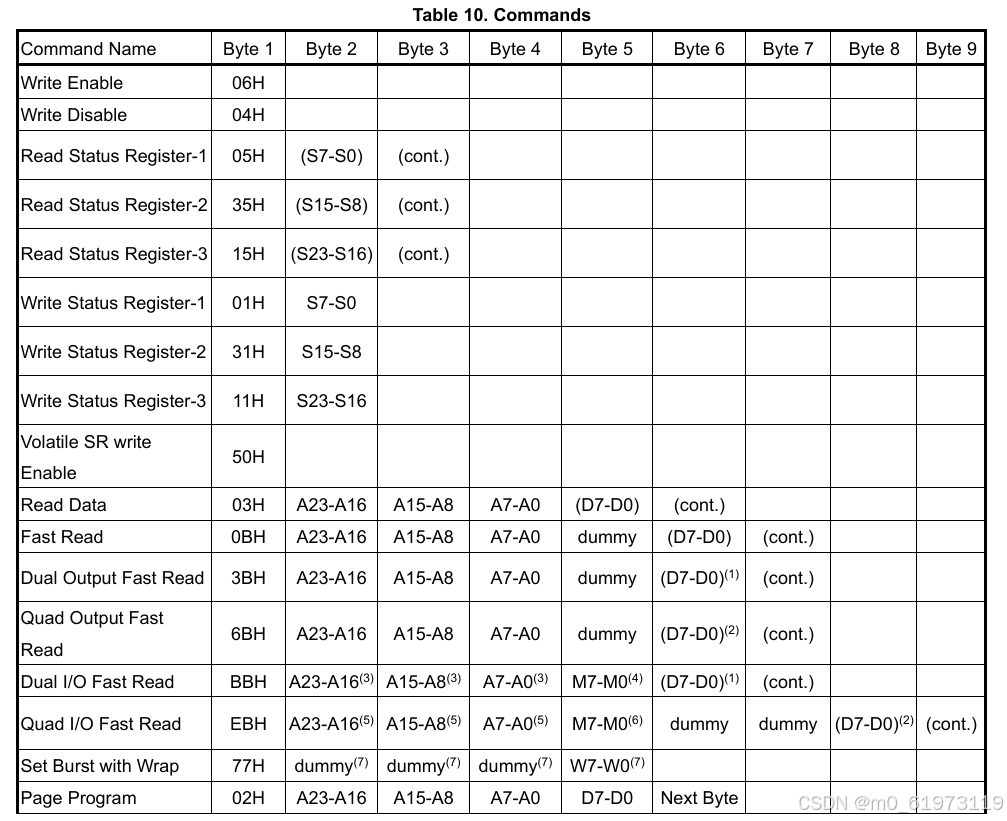
三、GD25Qxx指令集
四、软件SPI代码
STM32F207,HAL库,时钟极性=0,时钟相位=0
#include "MySPI.h" // Device header
#define MYSPI_CS_PORT GPIOA
#define MYSPI_CS_PIN GPIO_PIN_4
#define MYSPI_SCK_PORT GPIOA
#define MYSPI_SCK_PIN GPIO_PIN_5
#define MYSPI_MISO_PORT GPIOA
#define MYSPI_MISO_PIN GPIO_PIN_6
#define MYSPI_MOSI_PORT GPIOA
#define MYSPI_MOSI_PIN GPIO_PIN_7
/*引脚配置层*/
/**
* 函 数:SPI写SS引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SS的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SS为低电平,当BitValue为1时,需要置SS为高电平
*/
void MySPI_W_CS(uint8_t BitValue)
{
HAL_GPIO_WritePin(MYSPI_CS_PORT, MYSPI_CS_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SS引脚的电平
}
/**
* 函 数:SPI写SCK引脚电平
* 参 数:BitValue 协议层传入的当前需要写入SCK的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCK为低电平,当BitValue为1时,需要置SCK为高电平
*/
void MySPI_W_SCK(uint8_t BitValue)
{
HAL_GPIO_WritePin(MYSPI_SCK_PORT, MYSPI_SCK_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置SCK引脚的电平
}
/**
* 函 数:SPI写MOSI引脚电平
* 参 数:BitValue 协议层传入的当前需要写入MOSI的电平,范围0~1
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置MOSI为低电平,当BitValue为1时,需要置MOSI为高电平
*/
void MySPI_W_MOSI(uint8_t BitValue)
{
HAL_GPIO_WritePin(MYSPI_MOSI_PORT, MYSPI_MOSI_PIN, (GPIO_PinState)BitValue); //根据BitValue,设置MOSI引脚的电平,BitValue要实现非0即1的特性
}
/**
* 函 数:I2C读MISO引脚电平
* 参 数:无
* 返 回 值:协议层需要得到的当前MISO的电平,范围0~1
* 注意事项:此函数需要用户实现内容,当前MISO为低电平时,返回0,当前MISO为高电平时,返回1
*/
uint8_t MySPI_R_MISO(void)
{
return HAL_GPIO_ReadPin(MYSPI_MISO_PORT, MYSPI_MISO_PIN); //读取MISO电平并返回
}
/**
* 函 数:SPI初始化
* 参 数:无
* 返 回 值:无
* 注意事项:此函数需要用户实现内容,实现SS、SCK、MOSI和MISO引脚的初始化
*/
void MySPI_Init(void)
{
/*开启时钟*/
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA的时钟
/*GPIO初始化*/
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStructure.Pin = MYSPI_MOSI_PIN;
GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(MYSPI_MOSI_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = MYSPI_CS_PIN;
HAL_GPIO_Init(MYSPI_CS_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Pin = MYSPI_SCK_PIN;
HAL_GPIO_Init(MYSPI_SCK_PORT, &GPIO_InitStructure);
GPIO_InitStructure.Mode = GPIO_MODE_INPUT;
GPIO_InitStructure.Pin = MYSPI_MISO_PIN;
HAL_GPIO_Init(MYSPI_MISO_PORT, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入
/*设置默认电平*/
MySPI_W_CS(1); //SS默认高电平
MySPI_W_SCK(0); //SCK默认低电平
}
/*协议层*/
/**
* 函 数:SPI交换传输一个字节,使用SPI模式0,上升沿发送数据,下降沿读取数据
* 参 数:ByteSend 要发送的一个字节
* 返 回 值:接收的一个字节
*/
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{
uint8_t i, ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到
for (i = 0; i < 8; i ++) //循环8次,依次交换每一位数据
{
/*两个!可以对数据进行两次逻辑取反,作用是把非0值统一转换为1,即:!!(0) = 0,!!(非0) = 1*/
MySPI_W_MOSI(!!(ByteSend & (0x80 >> i))); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线
MySPI_W_SCK(1); //拉高SCK,上升沿移出数据
if (MySPI_R_MISO()){ByteReceive |= (0x80 >> i);} //读取MISO数据,并存储到Byte变量
//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0
MySPI_W_SCK(0); //拉低SCK,下降沿移入数据
}
return ByteReceive; //返回接收到的一个字节数据
}
#ifndef __MYSPI_H
#define __MYSPI_H
#include "head.h"
void MySPI_Init(void);
void MySPI_W_CS(uint8_t BitValue);
uint8_t MySPI_SwapByte(uint8_t ByteSend);
#endif
五、GD25Q128驱动代码
#include "gd25q128.h"
uint16_t GD25Q128_TYPE = 0;
uint32_t GD25Q128_SIZE = 0;
uint8_t GD25Q128_UID[8];
//SPI读写一个字节
//TxData:要写入的字节
//返回值:读取到的字节
static uint8_t GD25Q128_SPI_ReadWriteByte(uint8_t TxData)
{
uint8_t RxData = 0X00;
RxData = MySPI_SwapByte(TxData);
return RxData;
}
//4Kbytes为一个Sector
//16个扇区为1个Block
//W25Q128
//容量为16M字节,共有128个Block,4096个Sector
//初始化SPI FLASH的IO口
int GD25Q128_Init(void)
{
MySPI_Init();
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_4, GPIO_PIN_SET);//将HOLD置高,操作eeprom
GD25Q128_CS_L(); /* 拉低选中 */
GD25Q128_SPI_ReadWriteByte(0XFF);
GD25Q128_CS_H(); /* 拉高取消 */
GD25Q128_TYPE = GD25Q128_ReadID(); // 读取FLASH ID.
LOG("GD25Q128_TYPE :%d\r\n",GD25Q128_TYPE);
if(GD25Q128_TYPE == GD25Q128)
{
return -1;
}
return 0;
}
//读取GD25Q128的状态寄存器
//BIT7 6 5 4 3 2 1 0
//SPR RV TB BP2 BP1 BP0 WEL BUSY
//SPR:默认0,状态寄存器保护位,配合WP使用
//TB,BP2,BP1,BP0:FLASH区域写保护设置
//WEL:写使能锁定
//BUSY:忙标记位(1,忙;0,空闲)
//默认:0x00
uint8_t GD25Q128_ReadSR(void)
{
uint8_t byte = 0;
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_ReadStatusReg); //发送读取状态寄存器命令
byte = GD25Q128_SPI_ReadWriteByte(0Xff); //读取一个字节
GD25Q128_CS_H(); //取消片选
return byte;
}
//写GD25Q128状态寄存器
//只有SPR,TB,BP2,BP1,BP0(bit 7,5,4,3,2)可以写!!!
void GD25Q128_Write_SR(uint8_t sr)
{
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_WriteStatusReg); //发送写取状态寄存器命令
GD25Q128_SPI_ReadWriteByte(sr); //写入一个字节
GD25Q128_CS_H(); //取消片选
}
//GD25Q128写使能
//将WEL置位
void GD25Q128_Write_Enable(void)
{
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_WriteEnable); //发送写使能
GD25Q128_CS_H(); //取消片选
}
//GD25Q128写禁止
//将WEL清零
void GD25Q128_Write_Disable(void)
{
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_WriteDisable); //发送写禁止指令
GD25Q128_CS_H(); //取消片选
}
//读取芯片ID
//返回值如下:
//0XC817,表示芯片型号为GD25Q128
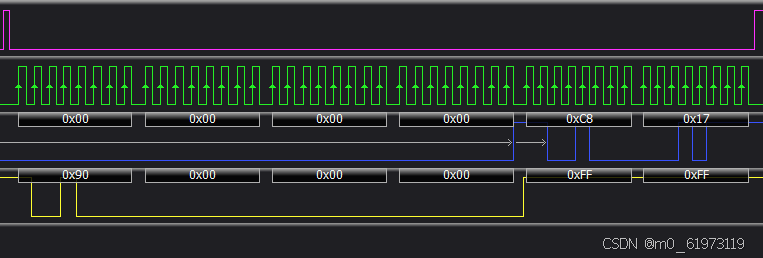
uint16_t GD25Q128_ReadID(void)
{
uint16_t Temp = 0;
GD25Q128_CS_L();
GD25Q128_SPI_ReadWriteByte(0x90); //发送读取ID命令
GD25Q128_SPI_ReadWriteByte(0x00);
GD25Q128_SPI_ReadWriteByte(0x00);
GD25Q128_SPI_ReadWriteByte(0x00);
Temp |= GD25Q128_SPI_ReadWriteByte(0xFF) << 8;
Temp |= GD25Q128_SPI_ReadWriteByte(0xFF);
GD25Q128_CS_H();
return Temp;
}
//读取SPI FLASH
//在指定地址开始读取指定长度的数据
//pBuffer:数据存储区
//ReadAddr:开始读取的地址(24bit)
//NumByteToRead:要读取的字节数(最大65535)
void GD25Q128_Read(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
uint16_t i;
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_ReadData); //发送读取命令
GD25Q128_SPI_ReadWriteByte((uint8_t)((ReadAddr) >> 16)); //发送24bit地址
GD25Q128_SPI_ReadWriteByte((uint8_t)((ReadAddr) >> 8));
GD25Q128_SPI_ReadWriteByte((uint8_t)ReadAddr);
for (i = 0; i < NumByteToRead; i++)
{
pBuffer[i] = GD25Q128_SPI_ReadWriteByte(0XFF); //循环读数
}
GD25Q128_CS_H();
}
//SPI在一页(0~65535)内写入少于256个字节的数据
//在指定地址开始写入最大256字节的数据
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大256),该数不应该超过该页的剩余字节数!!!
void GD25Q128_Write_Page(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint16_t i;
GD25Q128_Write_Enable(); //SET WEL
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_PageProgram); //发送写页命令
GD25Q128_SPI_ReadWriteByte((uint8_t)((WriteAddr) >> 16)); //发送24bit地址
GD25Q128_SPI_ReadWriteByte((uint8_t)((WriteAddr) >> 8));
GD25Q128_SPI_ReadWriteByte((uint8_t)WriteAddr);
for (i = 0; i < NumByteToWrite; i++)
GD25Q128_SPI_ReadWriteByte(pBuffer[i]); //循环写数
GD25Q128_CS_H(); //取消片选
GD25Q128_Wait_Busy(); //等待写入结束
}
//无检验写SPI FLASH
//必须确保所写的地址范围内的数据全部为0XFF,否则在非0XFF处写入的数据将失败!
//具有自动换页功能
//在指定地址开始写入指定长度的数据,但是要确保地址不越界!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
//CHECK OK
void GD25Q128_Write_NoCheck(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint16_t pageremain;
pageremain = 256 - WriteAddr % 256; //单页剩余的字节数
if (NumByteToWrite <= pageremain)
pageremain = NumByteToWrite; //不大于256个字节
while (1)
{
GD25Q128_Write_Page(pBuffer, WriteAddr, pageremain);
if (NumByteToWrite == pageremain)
break; //写入结束了
else //NumByteToWrite>pageremain
{
pBuffer += pageremain;
WriteAddr += pageremain;
NumByteToWrite -= pageremain; //减去已经写入了的字节数
if (NumByteToWrite > 256)
pageremain = 256; //一次可以写入256个字节
else
pageremain = NumByteToWrite; //不够256个字节了
}
};
}
//写SPI FLASH
//在指定地址开始写入指定长度的数据,可以跨页写,并且该函数带擦除操作!
//pBuffer:数据存储区
//WriteAddr:开始写入的地址(24bit)
//NumByteToWrite:要写入的字节数(最大65535)
uint8_t GD25Q128_BUFFER[4096];
void GD25Q128_Write(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint32_t secpos;
uint16_t secoff;
uint16_t secremain;
uint16_t i;
uint8_t *GD25Q128_BUF;
GD25Q128_BUF = GD25Q128_BUFFER;
secpos = WriteAddr / 4096; //扇区地址
secoff = WriteAddr % 4096; //在扇区内的偏移
secremain = 4096 - secoff; //扇区剩余空间大小
if (NumByteToWrite <= secremain)
secremain = NumByteToWrite; //不大于4096个字节
while (1)
{
GD25Q128_Read(GD25Q128_BUF, secpos * 4096, 4096); //读出整个扇区的内容
for (i = 0; i < secremain; i++) //校验数据
{
if (GD25Q128_BUF[secoff + i] != 0XFF)
break; //需要擦除
}
if (i < secremain) //需要擦除
{
GD25Q128_Erase_Sector(secpos); //擦除这个扇区
for (i = 0; i < secremain; i++) //复制
{
GD25Q128_BUF[i + secoff] = pBuffer[i];
}
GD25Q128_Write_NoCheck(GD25Q128_BUF, secpos * 4096, 4096); //写入整个扇区
}else
GD25Q128_Write_NoCheck(pBuffer, WriteAddr, secremain); //写已经擦除了的,直接写入扇区剩余区间.
if (NumByteToWrite == secremain)
break; //写入结束了
else //写入未结束
{
secpos++; //扇区地址增1
secoff = 0; //偏移位置为0
pBuffer += secremain; //指针偏移
WriteAddr += secremain; //写地址偏移
NumByteToWrite -= secremain; //字节数递减
if (NumByteToWrite > 4096)
secremain = 4096; //下一个扇区还是写不完
else
secremain = NumByteToWrite; //下一个扇区可以写完了
}
};
}
//擦除整个芯片
//等待时间超长...
void GD25Q128_Erase_Chip(void)
{
GD25Q128_Write_Enable(); //SET WEL
GD25Q128_Wait_Busy();
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_ChipErase); //发送片擦除命令
GD25Q128_CS_H(); //取消片选
GD25Q128_Wait_Busy(); //等待芯片擦除结束
}
//擦除一个扇区
//Dst_Addr:扇区地址 根据实际容量设置
//擦除一个山区的最少时间:150ms
void GD25Q128_Erase_Sector(uint32_t Dst_Addr)
{
//监视falsh擦除情况,测试用
Dst_Addr *= 4096;
GD25Q128_Write_Enable(); //SET WEL
GD25Q128_Wait_Busy();
GD25Q128_CS_L(); //使能器件
GD25Q128_SPI_ReadWriteByte(GD25X_SectorErase); //发送扇区擦除指令
GD25Q128_SPI_ReadWriteByte((uint8_t)((Dst_Addr) >> 16)); //发送24bit地址
GD25Q128_SPI_ReadWriteByte((uint8_t)((Dst_Addr) >> 8));
GD25Q128_SPI_ReadWriteByte((uint8_t)Dst_Addr);
GD25Q128_CS_H(); //取消片选
GD25Q128_Wait_Busy(); //等待擦除完成
}
//等待空闲
void GD25Q128_Wait_Busy(void)
{
while ((GD25Q128_ReadSR() & 0x01) == 0x01); // 等待BUSY位清空
}
#ifndef __GD25Q128_H__
#define __GD25Q128_H__
#include "main.h"
//GD25X系列/Q系列芯片列表
#define GD25Q80 0XC813
#define GD25Q16 0XC814
#define GD25Q32 0XC815
#define GD25Q64 0XC816
#define GD25Q128 0XC817
#define GD25Q128_CS_H() MySPI_W_CS(1)
#define GD25Q128_CS_L() MySPI_W_CS(0)
extern uint16_t GD25Q128_TYPE;
extern uint32_t GD25Q128_SIZE;
extern uint8_t GD25Q128_UID[8];
//指令表
#define GD25X_WriteEnable 0x06
#define GD25X_WriteDisable 0x04
#define GD25X_ReadStatusReg 0x05
#define GD25X_WriteStatusReg 0x01
#define GD25X_ReadData 0x03
#define GD25X_FastReadData 0x0B
#define GD25X_FastReadDual 0x3B
#define GD25X_PageProgram 0x02
#define GD25X_BlockErase 0xD8
#define GD25X_SectorErase 0x20
#define GD25X_ChipErase 0xC7
#define GD25X_PowerDown 0xB9
#define GD25X_ReleasePowerDown 0xAB
#define GD25X_DeviceID 0xAB
#define GD25X_ManufactDeviceID 0x90
#define GD25X_JedecDeviceID 0x9F
int GD25Q128_Init(void);
uint16_t GD25Q128_ReadID(void); //读取FLASH ID
uint8_t GD25Q128_ReadSR(void); //读取状态寄存器
void GD25Q128_Write_SR(uint8_t sr); //写状态寄存器
void GD25Q128_Write_Enable(void); //写使能
void GD25Q128_Write_Disable(void); //写保护
void GD25Q128_Write_NoCheck(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);
void GD25Q128_Read(uint8_t* pBuffer,uint32_t ReadAddr,uint16_t NumByteToRead); //读取flash
void GD25Q128_Write(uint8_t* pBuffer,uint32_t WriteAddr,uint16_t NumByteToWrite);//写入flash
void GD25Q128_Erase_Chip(void); //整片擦除
void GD25Q128_Erase_Sector(uint32_t Dst_Addr); //扇区擦除
void GD25Q128_Wait_Busy(void); //等待空闲
void GD25Q128_Write_Page(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);
#endif六、SPI波形

七、GD25QXX芯片读错误原因
注意事项:
- 数据写入的时候只能按照Page来写入,最多一次只能写256个字节,也就是一个页的空间。每次写入都要先擦除。
- 数据擦除只能按扇区擦除或按块擦除。可以按 16 页一组(4KB 扇区擦除)、128 页一组(32KB 块擦除)、256 页一组(64KB 块擦除)或者整片擦除(chip erase)。
- GD25Qxx必须去除写保护,才能更改数据,而且每次只要发送命令后再写入数据都必须先去除写保护,否则只有第一次操作被生效**。
- GD25Qxx写完数据后必须等待BUSY位清空才能写入数据,否则会写入失败
- 写内存时需要注意Flash的一个要点,Flash编程只能将1写为0,而不能将0写成1,写1靠擦除。所以需要在写内存的时候将内存擦除,使用内存擦除指令擦除内存(擦除的最小单位是扇区),内存变为0xFF,然后再写内存。先擦除再写
- 上电后设备自动处于写禁用状态(Write Enable Latch, WEL为0,WEL是只读位)。在Page Program, Sector Erase, Block Erase, Chip Erase or Write Status Register instruction(页编程、区擦除、块擦除、芯片擦除或者写状态寄存器指令)之前必须先进行写使能指令。在编程、擦除、写状态寄存器指令完成后,WEL自动变成0。
- W25Q64BV是使用四线SPI兼容总线:串行时钟:(CLK),片选(CS),串行数据输入(DI),串行数据输出(DO)。标准SPI指令是MCU在CLK的上升沿使用DI输入引脚串行写指令,地址,数据到设备。在CLK的下降沿用DO输出引脚从设备读取数据或状态。
-
W25Q128芯片第一次接收指令集的时候不会做出响应,所以在初始化时向芯片随便发送一个指令集(如0xFF),芯片才能正常响应。(针对部分单片机)
spi_start();//读取ID前向芯片发送一个FF指令
spi_swapByte(0xFF);
spi_stop();
w25q128_readID(&ID);//正常读取ID - 配置SPI:SPI的工作模式配置为 0,即 CPOL = 0,CPHA = 0
- Flash的写的有个特性跟EEPROM一样,就是它的一页是256个Byte,也就是在写入的时候,一次最多可以写入256个字节的数据,超过了需要自行在代码中处理,一次最多编程256字节,写超的话会对当前页的前面数据进行覆盖。不可跨页写
- 写入完成之后必须要等待一定的时间,不然马上写入第二次写入会失败W25Q128_Wait_Busy(); //等待写入结束
- 芯片可以从当前位置读完整个芯片数据;芯片只能单页写,写之前内容需要被擦除;
- 写入数据程序进入硬件中断 可能是堆栈溢出,比如FReeRTOS里面每一个任务分配的空间是128BYTE,定义局部变量超过128BYTE,内存卡死。

















 514
514

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









