







1. 发布者Publisher的编程实现
1.1. 创建功能包
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
1.2. 创建发布者代码(C++)
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc,char **argv)
{
//节点初始化
ros::init(argc,argv,"velocity_publisher");
//创建节点句柄
ros::NodeHandle n;
//创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
ros::Publisher turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
// 设置循环的频率
ros::Rate loop_rate(10);
int count = 0;
while (ros::ok())
{
// 初始化geometry_msgs::Twist类型的消息
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
// 发布消息
turtle_vel_pub.publish(vel_msg);
ROS_INFO("Publish turtle velocity command[%0.2f m/s,%0.2f rad/s]",vel_msg.linear.x,vel_msg.angular.z);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}
1.3. 配置发布者代码编译规则
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})1.4. 编译并运行发布者
catkin_make
- 运行roscore
roscore- 运行海龟仿真器
rosrun turtlesim turtlesim_node- 设置环境变量
source devel/setup.bash- 运行自己功能包定义
rosrun learning_topic velocity_publisher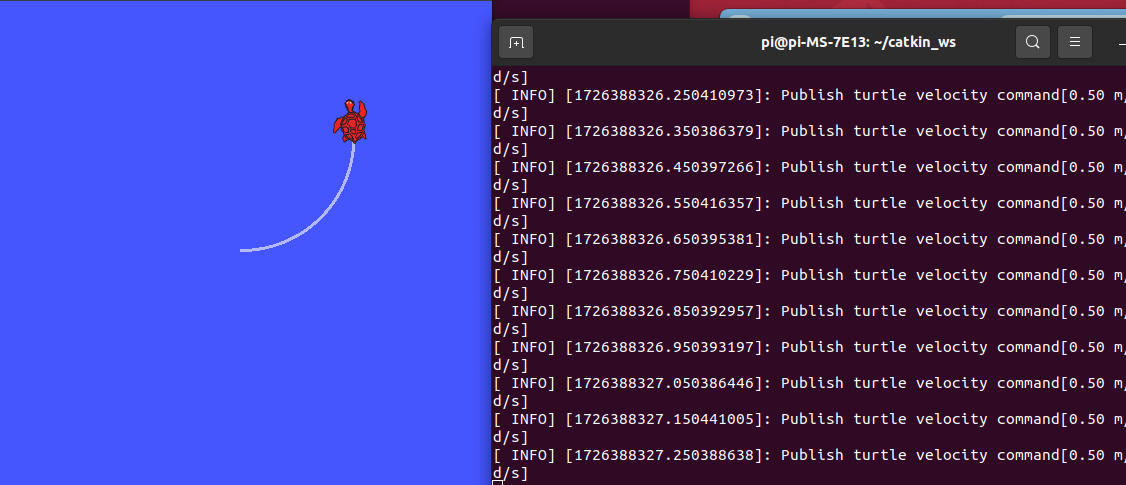
2. 订阅者Subscriber的编程实现
2.1. 订阅代码
#include <ros/ros.h>
#include "turtlesim/Pose.h"
void poseCallback(const turtlesim::Pose::ConstPtr& msg)
{
// 将接受到的消息打印出来
ROS_INFO("Turtle pose: x:%0.6f,y:%0.6f",msg->x,msg->y);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc,argv,"pose_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subsciber,订阅名为/turtle1/pose的topic,注册回调函数poseCallback
ros::Subscriber pose_sub = n.subscribe("/turtle1/pose",10,poseCallback);
// 循环等待回调函数
ros::spin();
return 0;
}2.2. 配置订阅代码编译规则
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})2.3. 编译代码
catkin_make
2.4. 运行代码
roscore
rosrun turtlesim turtlesim_node
source devel/setup.bash
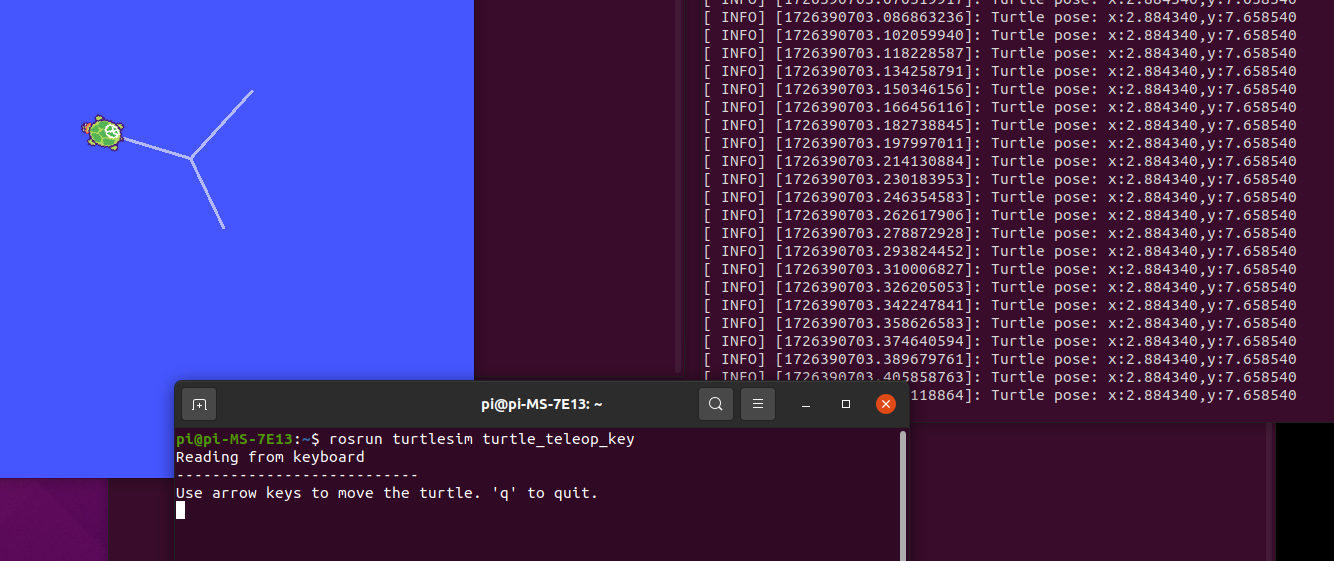
rosrun pose_subscriber pose_subscriber
rosrun turtlesim turtle_teleop_key
3. 话题消息的定义与使用

3.1. 创建msg文件夹
3.2. 数据接口定义
创建Person.msg文件并写入内容
注意这里只能一个空格
string name
uint8 sex
uint8 age
uint8 unkown = 0
uint8 male = 1
uint8 female = 2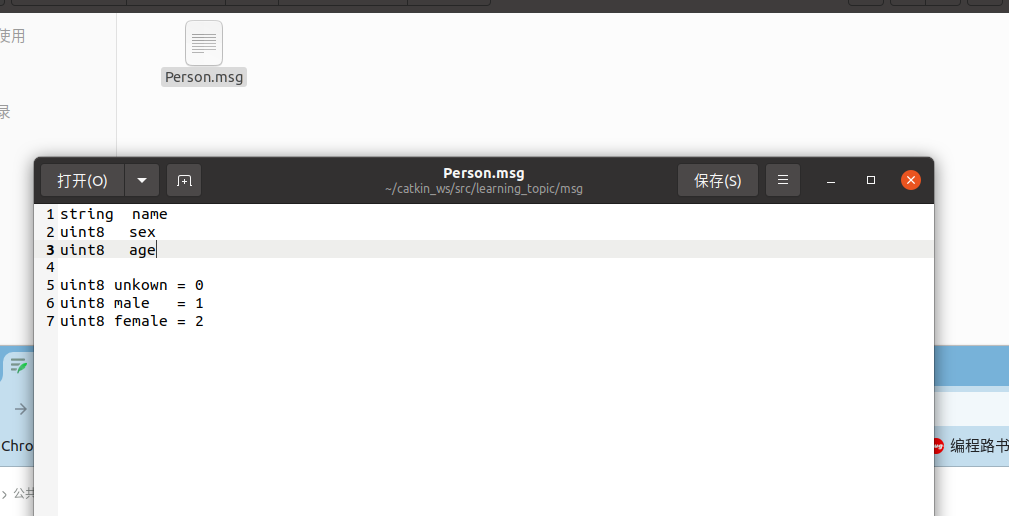
3.3. 在package.xml中添加功能包依赖
<build_export_depend>message_generation</build_export_depend>
<exec_depend>message_runtime</exec_depend>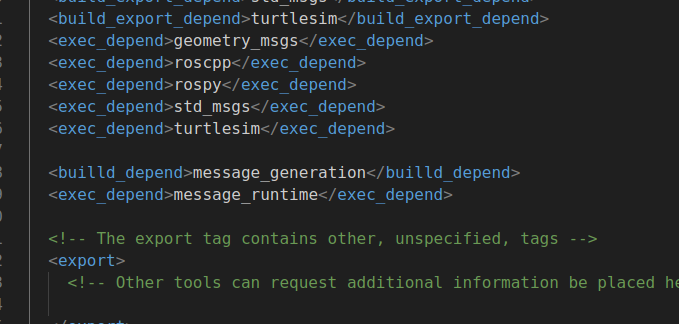
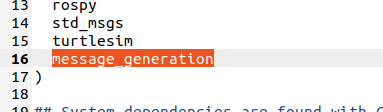
3.4. 在CMakeList.txt添加编译选项
- 添加依赖包
- 添加消息定义
add_message_file(FILES Person.msg)
generate_messages(DEPENDENCIES std_msgs)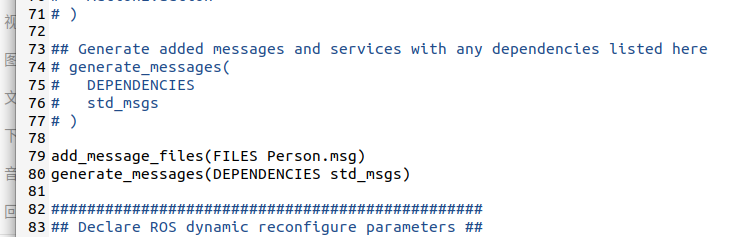
- 添加运行依赖
CATKIN_DEPENDS geometry_msgs roscpp rospy std_msgs turtlesim message_runtime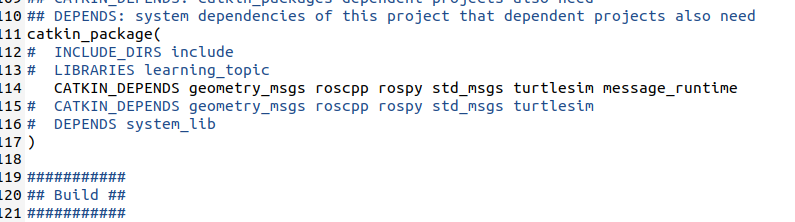
- 完成编译
3.5. 创建发布者代码
#include <ros/ros.h>
#include "learning_topic/Person.h"
int main(int argc, char **argv)
{
// ros节点初始化
ros::init(argc,argv,"person_publisher");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Publisher,发布名为/person_info的topic,消息类型为learning_topic::Person,队列长度为10
ros::Publisher person_info_pub = n.advertise<learning_topic::Person>("/person_info",10);
// 设置循环频率
ros::Rate loop_rate(1);
int count = 0;
while (ros::ok())
{
// 初始化learning_topic::Person类型的消息
learning_topic::Person person_msg;
person_msg.name = "Tom";
person_msg.age = 18;
person_msg.sex = learning_topic::Person::male;
// 发布消息
person_info_pub.publish(person_msg);
ROS_INFO("Publish Person Info: name:%s age:%d sex:%d",
person_msg.name.c_str(), person_msg.age, person_msg.sex);
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}3.6. 订阅者代码
#include <ros/ros.h>
#include "learning_topic/Person.h"
// 接受订阅的消息后,会进入消息回调函数
void personInfoCallback(const learning_topic::Person::ConstPtr& msg)
{
// 将接受到的消息打印出来
ROS_INFO("Subcribe Person Info: name:%s age:%d sex:%d", msg->name.c_str(), msg->age, msg->sex);
}
int main(int argc, char **argv)
{
// 初始化ROS节点
ros::init(argc, argv, "person_subscriber");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个Subscriber,订阅名为/person_info的topic,注册回调函数personInfoCallback
ros::Subscriber person_info_sub = n.subscribe("/person_info", 10, personInfoCallback);
// 循环等待回调函数
ros::spin();
return 0;
}3.7. 添加编译规则
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)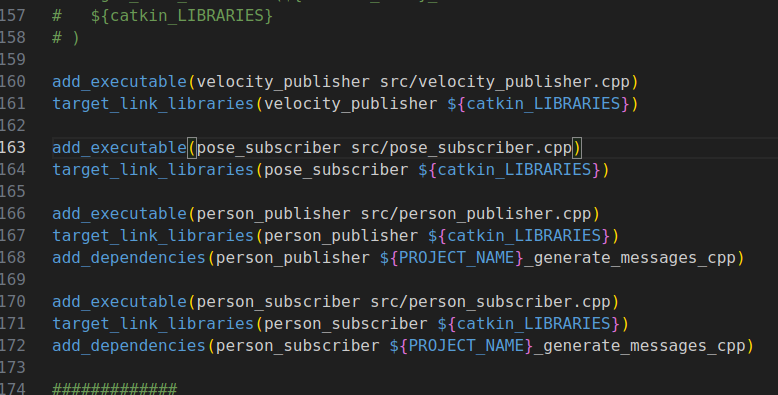
3.8. 运行代码
rosrun learning_topic person_subscriber
rosrun learning_topic person_publisher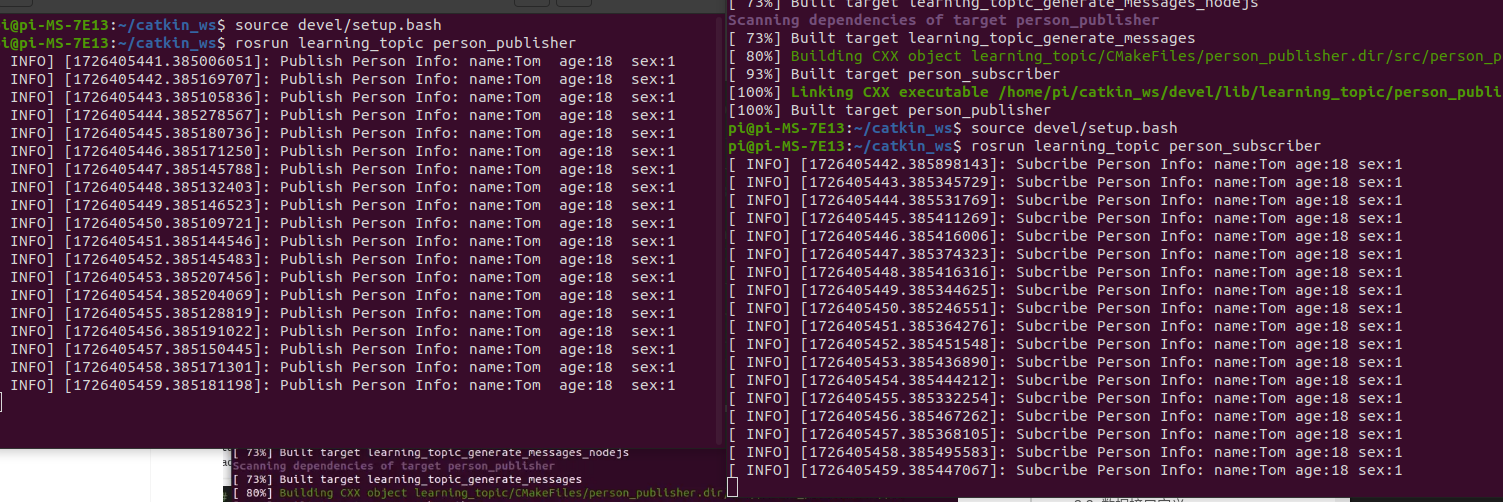
4. 客户端Client的编程实现
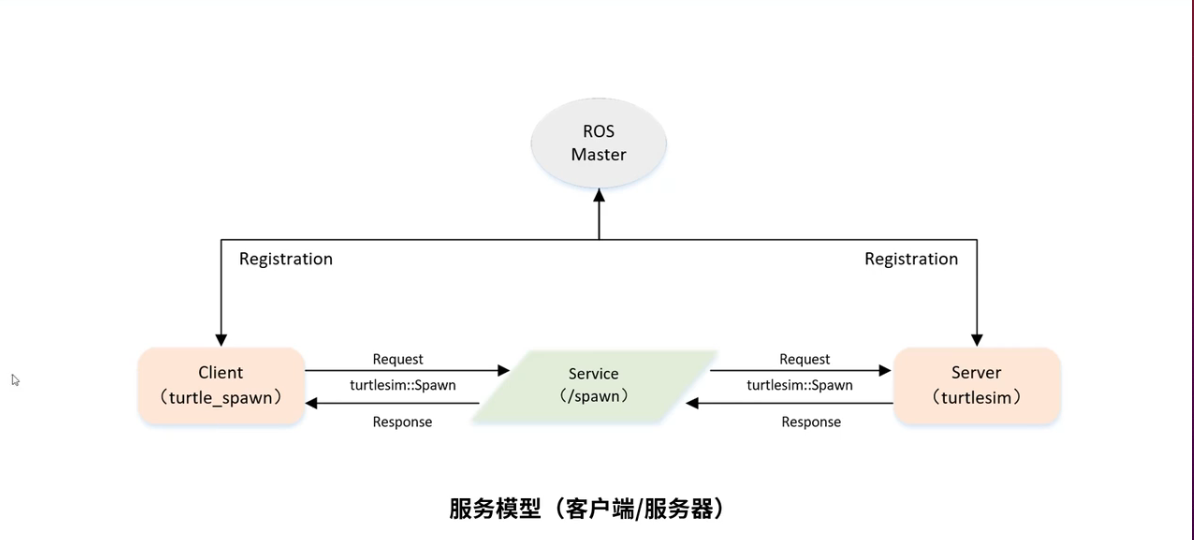
实现客户端的流程:
- 初始化ROS节点;
- 创建一个Client实例
- 发布服务请求数据;
- 等待Server处理之后的应答结果;
4.1. 创建功能包
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
4.2. 编写代码
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc,argv,"turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f,y:%0.6f,name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
}4.3. 配置编译规则
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})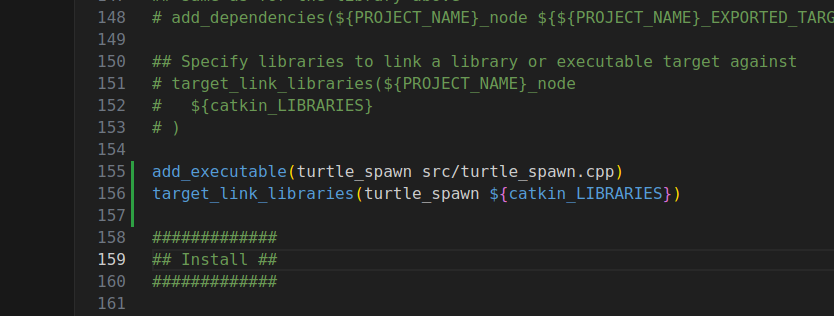
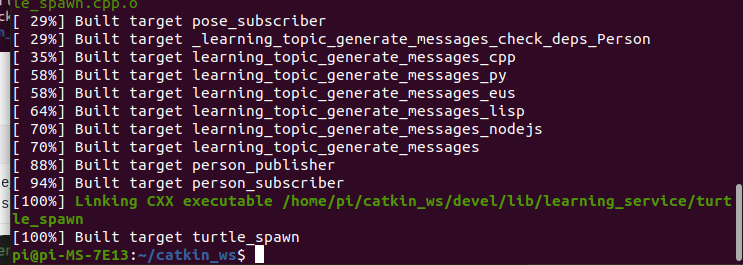
4.4. 编译代码
4.5. 程序运行
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn 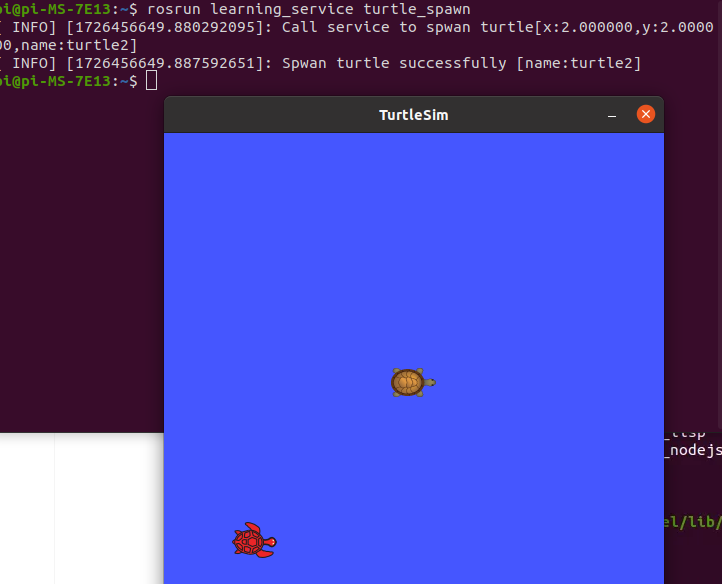
5. 服务端Service编程实现
5.1. 编写代码
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Trigger.h>
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
// service回调函数,输入参数req,输出参数res
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
// 显示请求数据
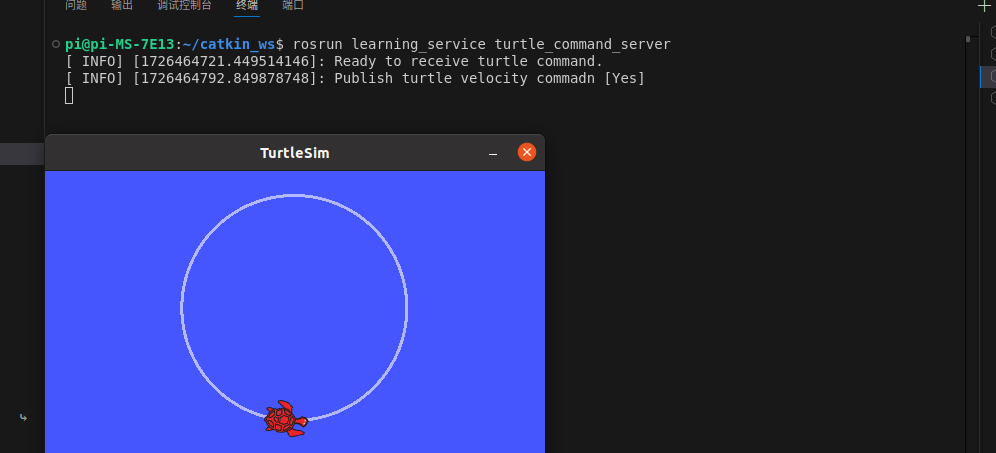
ROS_INFO("Publish turtle velocity commadn [%s]", pubCommand==true?"Yes":"No");
// 设置反馈数据
res.success = true;
res.message = "Change turtle command state!";
return true;
}
int main(int argc, char** argv)
{
// ROS节点初始化
ros::init(argc,argv,"turtle_command_server");
// 创建节点句柄
ros::NodeHandle node;
// 创建一个名为/turtle_command的server,注册回调函数commandCallback
ros::ServiceServer command_service = node.advertiseService("/turtle_command",commandCallback);
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度为10
turtle_vel_pub = node.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",10);
// 循环等待回调函数
ROS_INFO("Ready to receive turtle command.");
// 设置循环的频率
ros::Rate loop_rate(10);
while (ros::ok())
{
// 查看一次回调函数队列
ros::spinOnce();
// 如果标志为true,则发布速度指令
if (pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
// 按照循环频率延时
loop_rate.sleep();
}
return 0;
}5.2. 配置编译规则
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})5.3. 编译代码

5.4. 程序运行
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_command_server
rosservice call /turle_command "{}"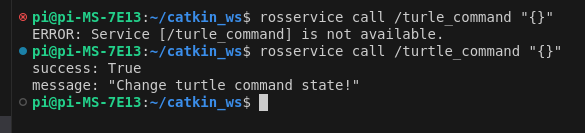















 1045
1045

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









