







这是一份用于图注意力网络GAT模型理解的入门教程,采用论文与代码结合的方式阐述GAT注意力机制的实现过程。本文关于数学原理部分不一定完全严谨,如有错误请在评论区指出。
该模型来自论文:https://arxiv.org/abs/1710.10903
https://arxiv.org/abs/1710.10903本文着重分析pytorch框架的模型实现,代码来自开源网络:GitHub - Diego999/pyGAT: Pytorch implementation of the Graph Attention Network model by Veličković et. al (2017, https://arxiv.org/abs/1710.10903)
1 频域网络GCN与空域网络GAT
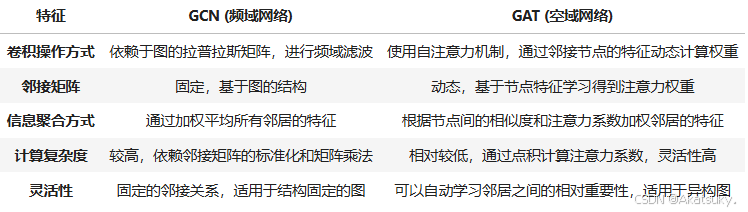
1.1 频域网络GCN
在图神经网络(GNN)领域中发展出了许多不同的节点信息聚合方式,其中空域GNN与频域GNN是两个十分最重要的发展方向,在之前的文章中我们已经从0开始大致证明了空域GNN的典型算法之一GCN的实现方式:
在这里稍作复习,我们知道GCN节点信息的聚合方式是取决于图的拉普拉斯矩阵。为了应对空域中不规则图结构无法使用固定卷积核的问题,GCN采用“傅里叶变换”的思想,将图结构变换到频域,完成卷积后再采用逆变换将其变回空间域中。GCN本质上是在频域上对图信号进行滤波。通过拉普拉斯矩阵的特征分解,我们可以将图卷积视为一种频域滤波器。
1.2 空域网络GAT
GAT(Graph Attention Network)是基于空域图卷积的思想,它通过学习每对节点间的注意力权重,来决定每个节点与邻居节点交互的强度。GAT的核心是通过自注意力机制来加权节点间的信息传播,而不是依赖固定的邻接矩阵。
其步骤如下:
- 节点特征映射
- 计算每个节点之前的注意力分数(权重)
- 邻居信息加权求和
- 多头注意力
其实现代码实现如下:
class GraphAttentionLayer(nn.Module):
def __init__(self, in_features, out_features, dropout, alpha, concat=True):
super(GraphAttentionLayer, self).__init__()
self.dropout = dropout
self.in_features = in_features
self.out_features = out_features
self.alpha = alpha
self.concat = concat
self.W = nn.Parameter(torch.zeros(size=(in_features, out_features)))
nn.init.xavier_uniform_(self.W.data, gain=1.414)
self.a = nn.Parameter(torch.zeros(size=(2*out_features, 1)))
nn.init.xavier_uniform_(self.a.data, gain=1.414)
self.leakyrelu = nn.LeakyReLU(self.alpha)
def forward(self, x, adj):
h = torch.bmm(x, self.W)
N = x.size()[0]
a_input = torch.cat([h.repeat(1, N).view(N * N, self.out_features), h.repeat(N, 1)], dim=1).view(N, N, 2 * self.out_features)
attention = self.leakyrelu(torch.matmul(a_input, self.a).squeeze(2))
zero_vec = -9e15 * torch.ones_like(attention)
attention = torch.where(adj > 0, attention, zero_vec)
attention = F.softmax(attention, dim=1)
attention = F.dropout(attention, self.dropout, training=self.training)
h_prime = torch.bmm(attention, h)
if self.concat:
return F.elu(h_prime)
else:
return h_prime
def __repr__(self):
return self.__class__.__name__ + ' (' + str(self.in_features) + ' -> ' + str(self.out_features) + ')'
class GAT(nn.Module):
def __init__(self, nfeat, nhid, n_final_out, dropout, alpha, nheads):
"""Dense version of GAT."""
super(GAT, self).__init__()
self.dropout = dropout
self.attentions = [GraphAttentionLayer(nfeat, nhid, dropout=dropout, alpha=alpha, concat=True) for _ in range(nheads)]
for i, attention in enumerate(self.attentions):
self.add_module('attention_{}'.format(i), attention)
self.out_att = GraphAttentionLayer(nhid * nheads, n_final_out, dropout=dropout, alpha=alpha, concat=False)
def forward(self, x, adj):
x = F.dropout(x, self.dropout, training=self.training)
x = torch.cat([att(x, adj) for att in self.attentions], dim=1)
x = F.dropout(x, self.dropout, training=self.training)
x = F.elu(self.out_att(x, adj))
return x2 GAT注意力机制的实现
如果您了解过Transformer模型,那么其中的自注意力机制一定会让您印象深刻,GAT中的注意力机制与Transformer中的注意力机制有异曲同工之妙。如果您没有了解过Transformer也无妨,本文将以最简单易懂的语言来阐述注意力机制的奇妙实现方式。
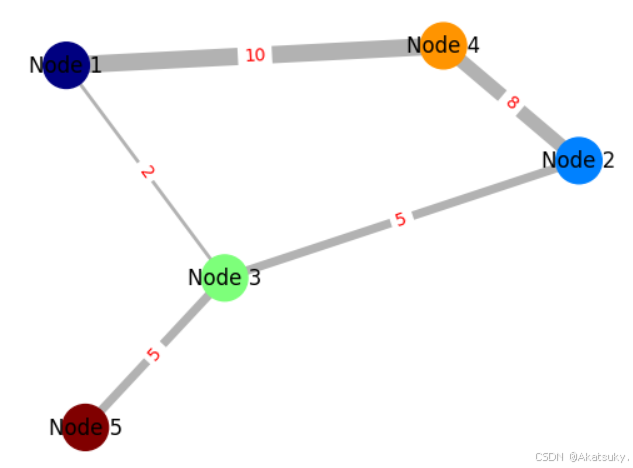
GAT中的注意力机制实则是在图中对每个节点之间连接的边赋予权重。如下图示例,GAT中注意力机制即是通过学习得到节点之间的“注意力评分”,可以看出,联系越密切的点其评分越高。
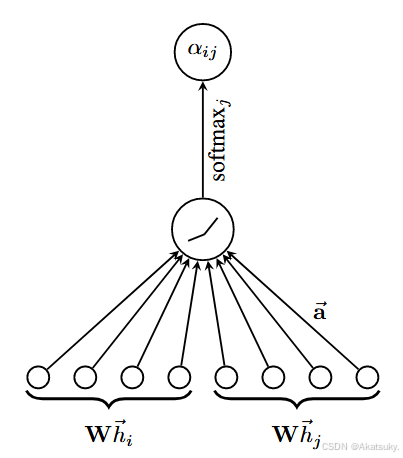
在论文中注意力评分 的计算公式如下:
公式描述了注意力评分的计算方法,其中 是一个可学习的矩阵,形状为
,其作用是将输入节点的特征映射到高维;
是节点
的输入特征向量,形状为
;
是一个形状为
的矩阵,其目的是将最终结果映射为一个特定的值,其具体计算流程如下:
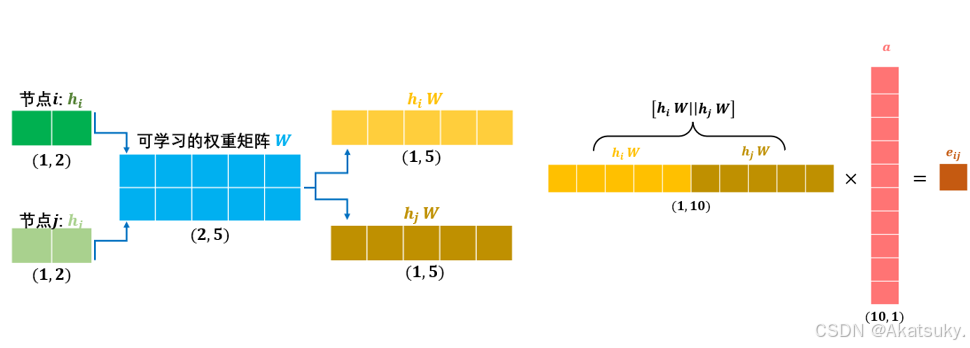 上图中,假设我们初始输入的每个节点都有两个特征,
上图中,假设我们初始输入的每个节点都有两个特征,
节点 和节点
的输入特征向量经过同一个可学习的参数矩阵
,其原本的2维特征被映射到5维,之后文中对这两个升维后的特征进行拼接(concatenate),再经过另一个可学习的注意力参数矩阵
映射为一个特征值,这样就得到了节点
对于节点
的注意力分数。(注意,这个注意力是单向的,如果是节点
对于节点
则要重新换顺序计算一次,下文会给出更细致的解释)
上图只是计算了一个方向的注意力分数,实际运用中我们一般是期望得到一个注意力矩阵,矩阵的形状一般为 ,其中为
节点个数,具体实现流程如下图:
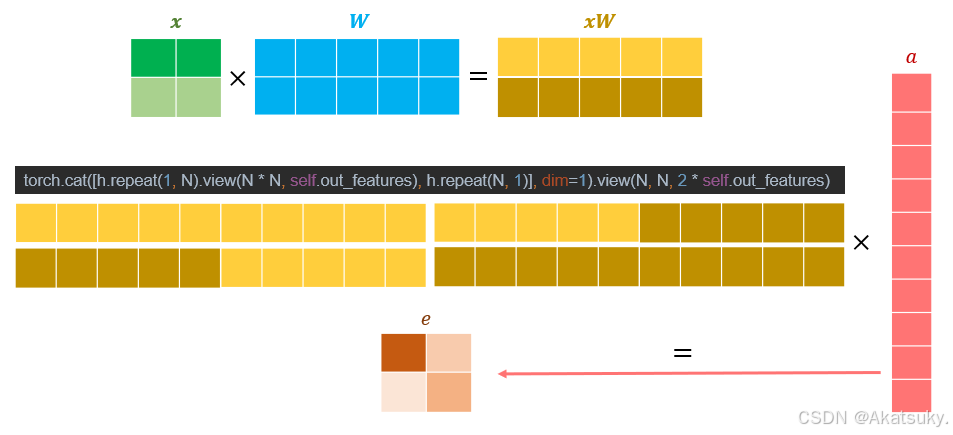
从最简单的例子入手,假如有一个两个节点的图,每个节点有一个输入特征,矩阵W将特征升高到3维度,即 ,我们期望得到的是一个
的注意力矩阵,将该示例带入代码中,得到的流程如下图所示:
下面以代码角度阐述计算过程:
h = torch.bmm(x, self.W)得到结果:
可以看到经过线性矩阵 的作用后,两个节点的特征从1维扩展到3维。
h.repeat(1, N)执行 h.repeat(1, N),意思是将 h 沿着第二维(特征维度)重复 N 次。因为 N=2,所以会得到以下的张量,形状为 【2,3】(2 是节点数,6 是特征维度):
h.repeat(N, 1)接着,执行 h.repeat(N, 1),意思是将 h 沿着第一维(节点数维度)重复 N 次。因为 N=2,所以得到以下的张量,形状为 【4,3】(4 是节点数,3 是特征维度):
torch.cat([h.repeat(1, N), h.repeat(N, 1)], dim=2)这个操作沿着第二维(特征维度)拼接两个重复的张量。
- 第一个张量是 h.repeat1(1, N),它的形状是 【2, 6】。
- 第二个张量是 h.repeat2(N, 1),它的形状是 【4, 3】。
执行 torch.cat 后,它们沿着第二维拼接,结果如下:
这个矩阵 的形状是 【2, 2, 6】,也就是每对节点的特征向量拼接成一个长度为 6 的向量。
torch.cat([h.repeat(1, N), h.repeat(N, 1)], dim=2).view(N, N, 2 * self.out_features)最后,通过 .view(N, N, 2 * C) 将张量重新调整为形状 【2, 2, 6】,即每一对节点(共 2x2=4 对)都被拼接了它们的特征,形状为 【N, N, 2 * C】,可表示为:
torch.matmul(a_input, self.a).squeeze(2) 采用形状为 可学习的注意力参数矩阵
,使用 torch.matmul 批量矩阵乘法得到最初的注意力矩阵
:
attention = self.leakyrelu(torch.matmul(a_input, self.a).squeeze(2))
attention = F.softmax(attention, dim=1)最终采用 leakyrelu 进行非线性操作,使用softmax归一化后得到最终结果:
接下来我们就可以采用计算好的注意力系数对节点进行特征更新了:
其中 是每个节点更新后的特征向量,
是激活函数。
值得注意的是,对于Transformer的注意力机制来说,作用是求取全局注意力,例如一个包含10个单词的句子,Transfromer期望得到一个 填满的注意力矩阵。然而在GNN领域中我们更注重于节点相邻接的节点对其影响,而不是全局结果。
对于上文的例子来说,我们实现的功能的计算出每个节点之间的注意力评分,然而这是全局注意力。以下图为例,Node5于Node4并没有直接相连,在这里计算这两点之间的注意力评分是多余的,为了将图结构加入到注意力机制中,作者使用了MASK方法:
zero_vec = -9e15 * torch.ones_like(attention)
attention = torch.where(adj > 0, attention, zero_vec)MASK方法的原理也十分简单,就是使用图结构的邻接矩阵于注意力句子的哈达玛乘积(Hadamard product)将不连接节点之间的注意力分数转化为无穷小,即可得到期望的结果。
3 多头注意力机制
关于多头注意力机制的引入,作者在文中这样写到:

简化来说就是为了增强模型的稳定性与准确性。文中公式如下:

式中 代表了注意力头的个数,将
个头的注意力机制拼接,最终得到的特征向量的维度也变为原来的
倍,即
特别的,如果需要在网络的最后(预测)层上执行多头注意力,那么采用平均值即可得到期望的结果:
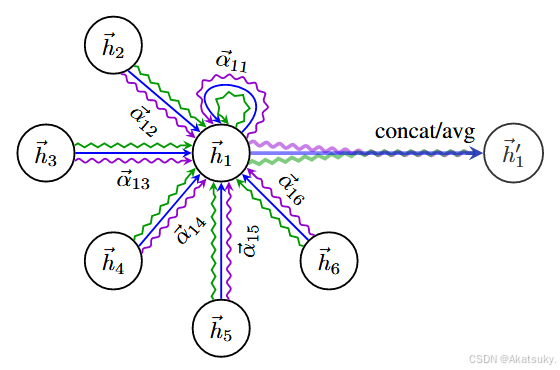
图中每个不同颜色的波浪线即代表不同的注意力头,共同作用更新节点信息。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









