






 文章介绍了HMM(隐马尔可夫模型)的基本概念,通过掷骰子的例子解释了模型的工作原理,特别是维特比算法在计算最大概率状态序列的应用。同时,文章探讨了MapMatch中HMM的实际运用,以及GPS点漂移问题的解决方案,包括调整搜索半径和优化高速点的选取概率。
文章介绍了HMM(隐马尔可夫模型)的基本概念,通过掷骰子的例子解释了模型的工作原理,特别是维特比算法在计算最大概率状态序列的应用。同时,文章探讨了MapMatch中HMM的实际运用,以及GPS点漂移问题的解决方案,包括调整搜索半径和优化高速点的选取概率。
HMM是什么
隐形马尔科夫模型(HMM)
假设我手里有三个不同的骰子。三个骰子可能投掷出的点数为1-8.
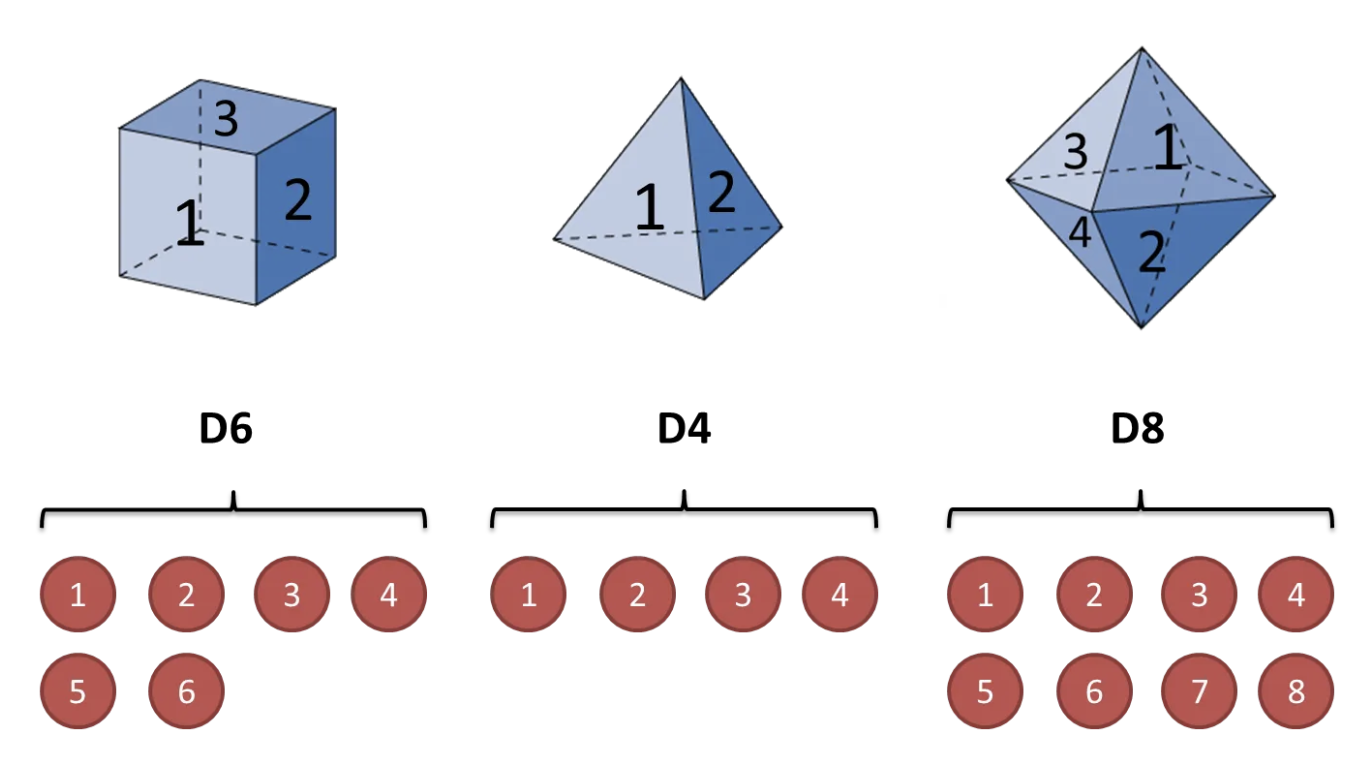
蓝色的骰子代表隐藏状态。所以目前有三种隐藏状态
红色的点数代表观测。有8种点数的可能,8种观测状态。
开始掷骰子,我们先从三个骰子里挑一个,挑到每一个骰子的概率都是1/3。然后我们掷骰子,得到一个数字,1,2,3,4,5,6,7,8中的一个。不停的重复上述过程,我们会得到一串数字,每个数字都是1,2,3,4,5,6,7,8中的一个。例如我们可能得到这么一串数字(掷骰子10次):1 6 3 5 2 7 3 5 2 4
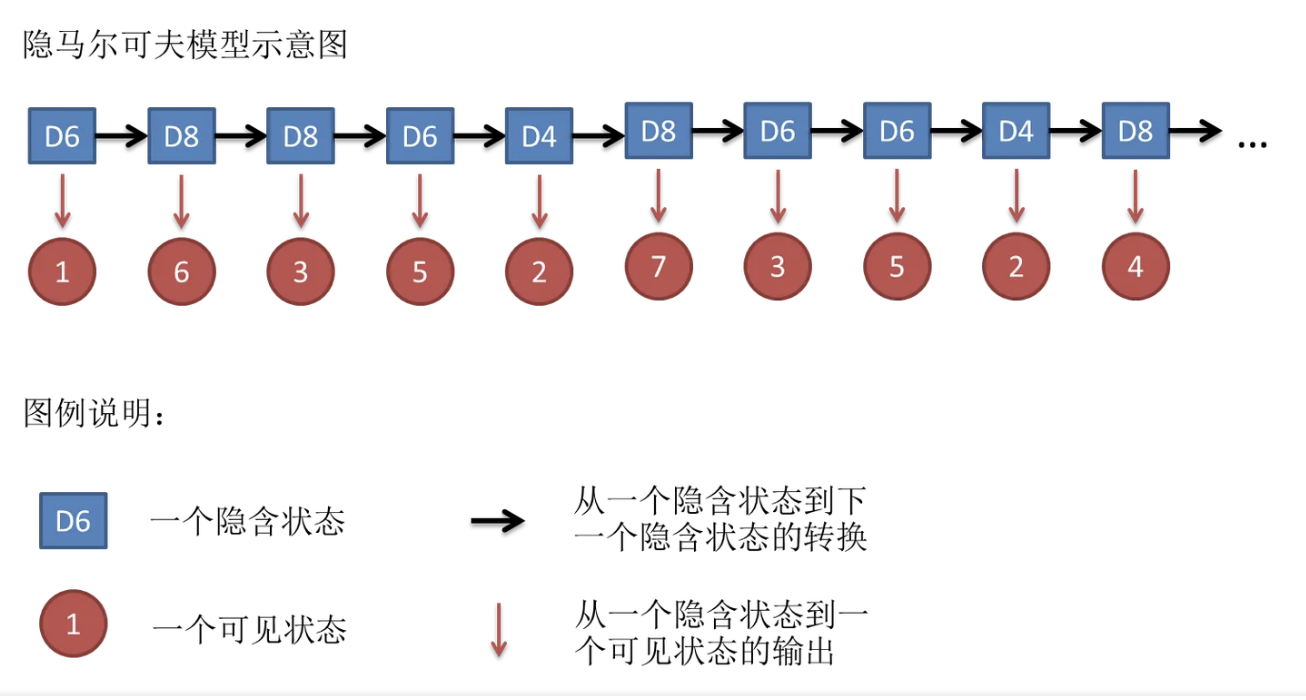
蓝色部分我们称为 状态序列(状态链)
红色部分我们成为 观测序列(观测链)
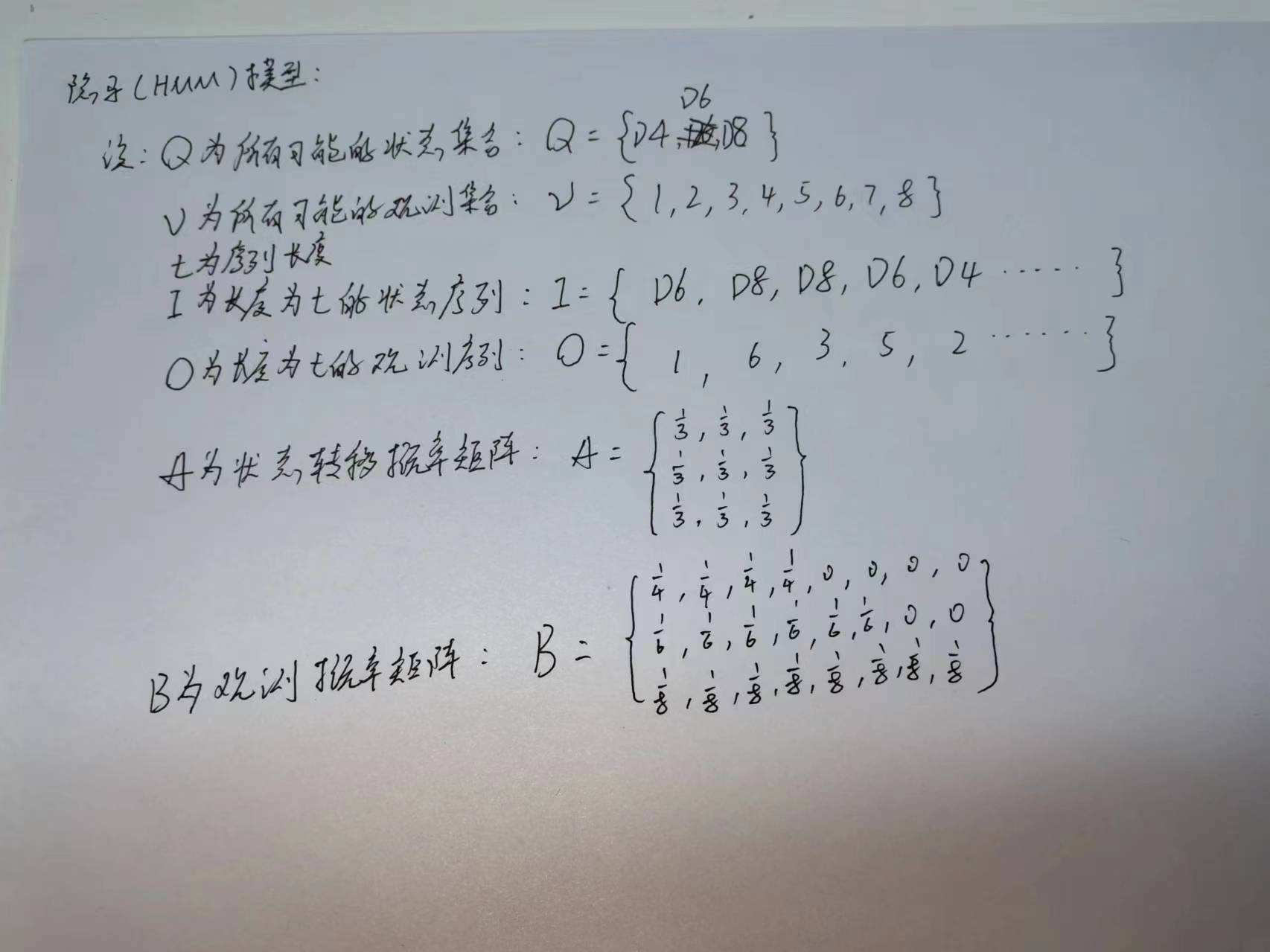
我们将其抽象为HMM数学模型:
隐马尔可夫模型的 3 个基本问题
1.已知I、O、Q、V,求A和B
2.已知A、B、Q、V、I,求O
3.已知A、B、Q、V、O,求I
我们主要讨论问题3:
也就是,我们已知状态转移矩阵、观测概率矩阵、观测序列,怎么得到最大概率的状态序列?
维特比算法:
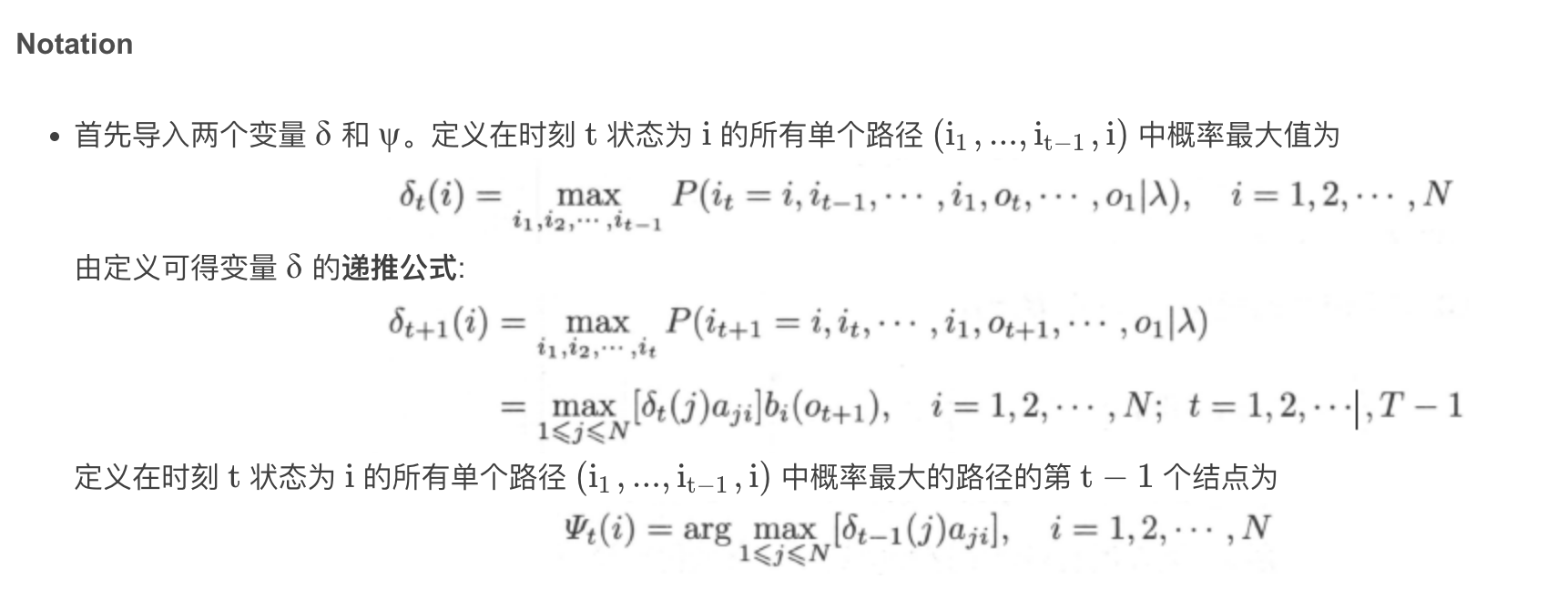
这种东西让人望而却步,我来换种方式给大家讲解。说人话:
回到上面的骰子问题,其实我们要解决的问题就是:
没有蓝色部分,只有红色部分;我们需要计算出最大概率的蓝色序列。
我们按照公式算一遍就知道了:
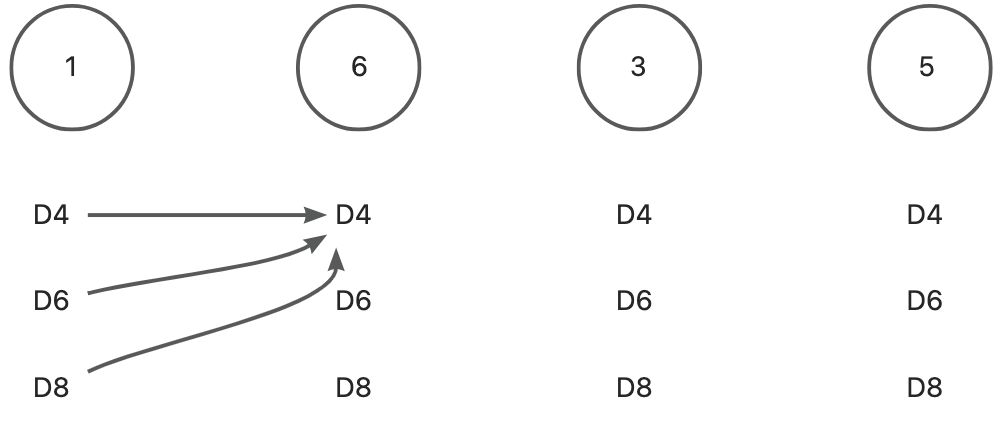
先计算初始状态1:
D4: 1/4 (max)
D6: 1/6
D8: 1/8
初始状态应该是:D4
先计算1->6:
D4->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D4->D4) * 观测概率(D4出现6的概率) = 1/4*1/3*0 = 0
D6->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D6->D4) * 观测概率(D4出现6的概率) = 1/4*1/3*1/6 = 1/18
D8->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D8->D4) * 观测概率(D4出现6的概率) = 1/4*1/3*1/8 = 1/24
6的状态应该是:D6
在计算6->3:
D4->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D4->D4) * 观测概率(D4出现6的概率) = 1/18*1/3*1/4 = 1/12
D6->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D6->D4) * 观测概率(D4出现6的概率) = 1/18*1/3*1/6 = 1/18
D8->D4: 前序概率(第一个骰子是D4的概率) * 转移概率(D8->D4) * 观测概率(D4出现6的概率) = 1/18*1/3*1/8 = 1/24
3的状态应该是:D4
依次类推即可推出最大概率的状态序列。
维特比算法在MapMatch中的应用:
mapmatch中如何使用HMM计算路网轨迹呢?
我们把GPS点认为是已知的观测序列O,路网轨迹就是要求的状态序列 I。同时,我们也能计算得出状态转移矩阵和观测矩阵。
说人话:
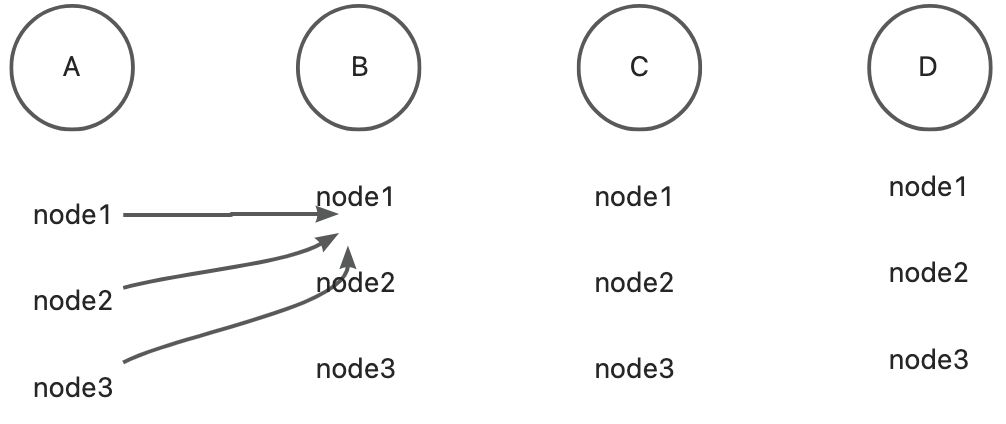
先看点A:
根据node与A的距离计算观测概率,记为b(A1),b(A2),b(A3);
选出prob_b最大的node作为起始点。
再看点B:
- 根据node与B的距离计算观测概率,记为prob_b(B1),prob_b(B2),prob_b(B3);
- 然后计算A候选点到B候选点的状态转移矩阵:
假设:Anode1->Bnode1,先计算两点直线距离real_d,然后计算两点路径规划距离d,根据两者之差计 算转移概率,prob_d=1/(1+|real_d-d|)
- 随后选出prob_d+prob_b最大的候选点作为该点的状态点。
依次类推下次,就能得到最大概率的路网点的序列。问题解决。
MapMatch遇到的问题
现在GPS点存在漂移的问题,使得高速点不能被吸附到,产生无法计费的问题。
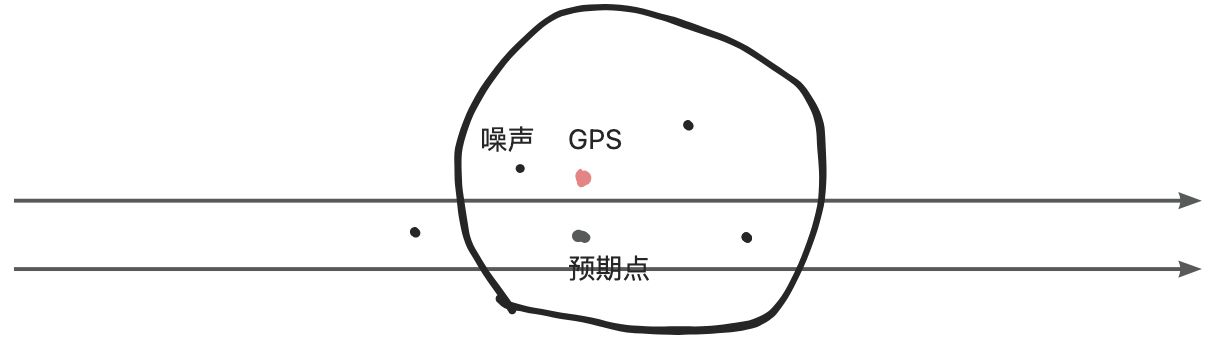
GPS点的飘逸可能造成吸附错误,把状态点吸附到了噪声点上。又或者因为飘逸太远而搜索半径太小,导致预期点就没有进入候选列表。
问题其实分为两个部分:
- 搜索半径能不能框到高速点(动态设置搜索半径)。
- 能不能有够大的概率选中高速点(动态提高高速点的概率)。
第一个问题的解法:对与传入引擎的轨迹点,增加每个点的GPS精度;GPS精度与搜索半径成反比,越不精确的点会有更大的搜索半径。这个策略保证高速点一定能被选入候选点。
第二个问题的解法:虽然让预期点进入了候选列表,但是也要有足够大的概率选中高速点。我们可以筛选出所有的高速点,把他的候选概率提高,增加被选中的可能。

















 1341
1341

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









