






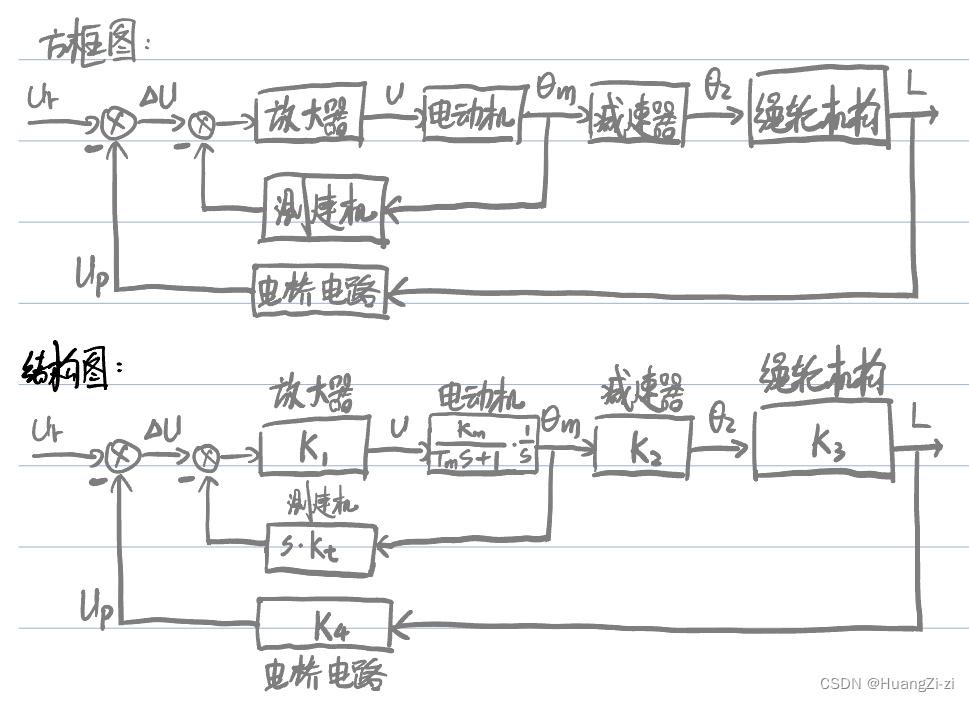
方框图描绘
灵活性比较强,无法总结规律,所以就给一些题目练练手:
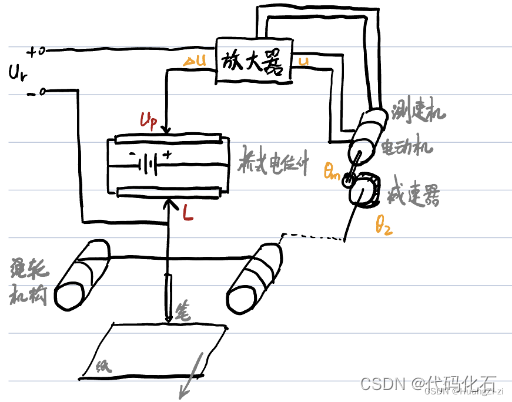
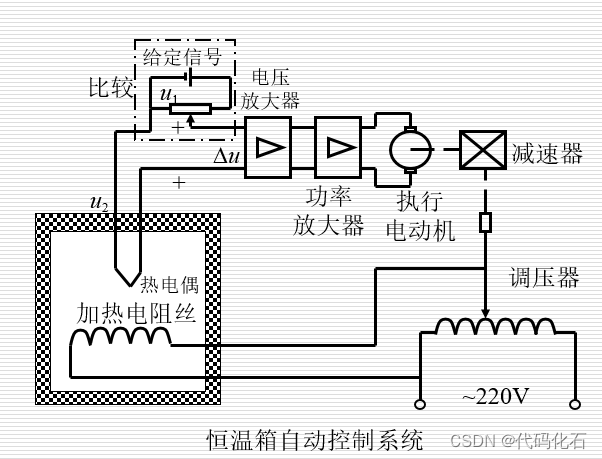

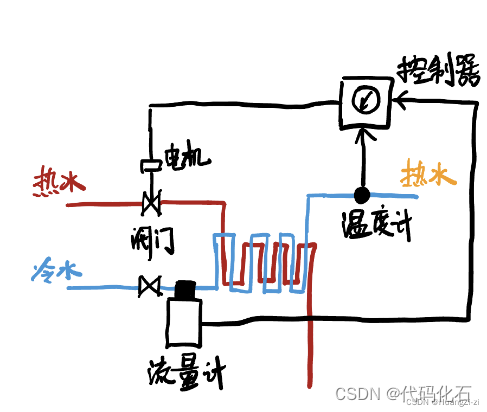
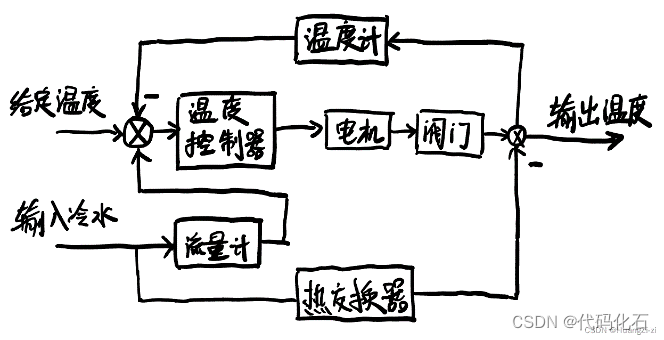

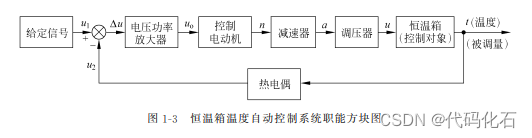
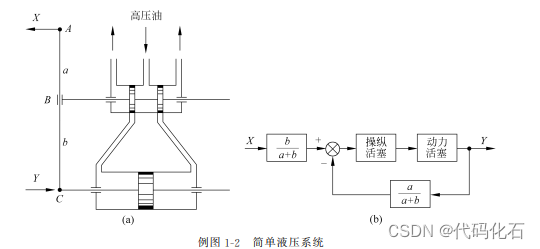
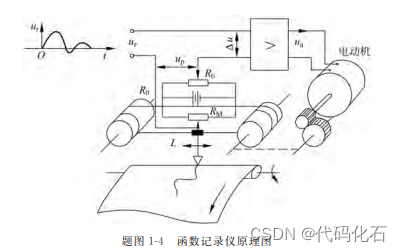
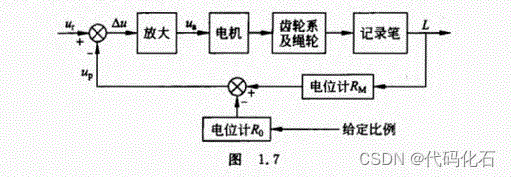
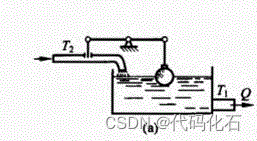
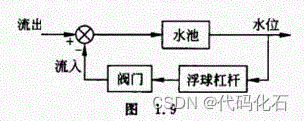

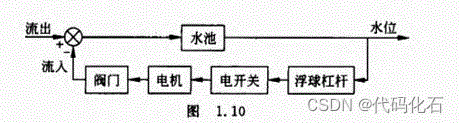
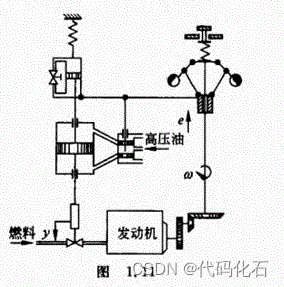
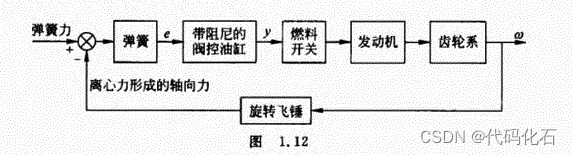
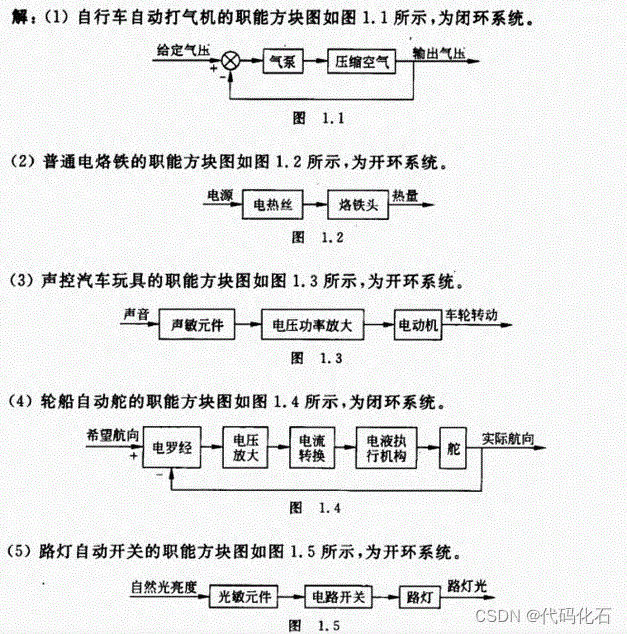
举出5个身边控制系统的例子,试用职能方块图说明其基本原理,并指出是开环控制 还是闭环控制
A/D,D/A转换
题目的主要思路就是给出数字信号某某数字和模拟信号多少伏特,将两个进行转换。他们成正比例关系即:y=kx,一般知道两个信号的最大值,进行比例求k,然后求其他值对应的值。
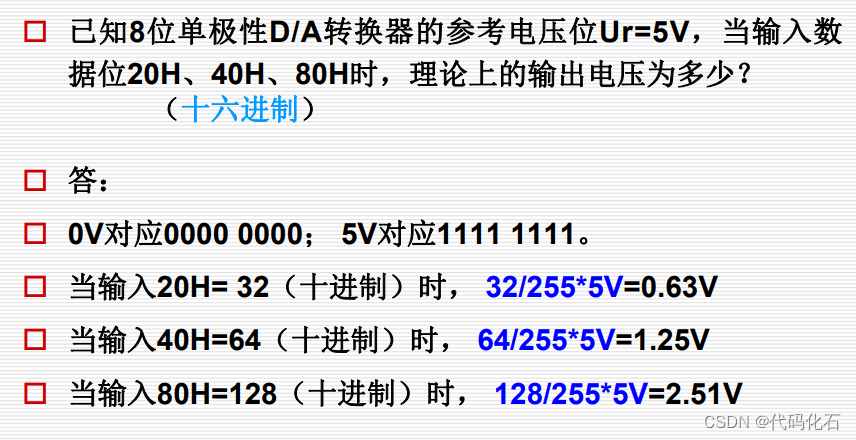
这个是数字求模拟
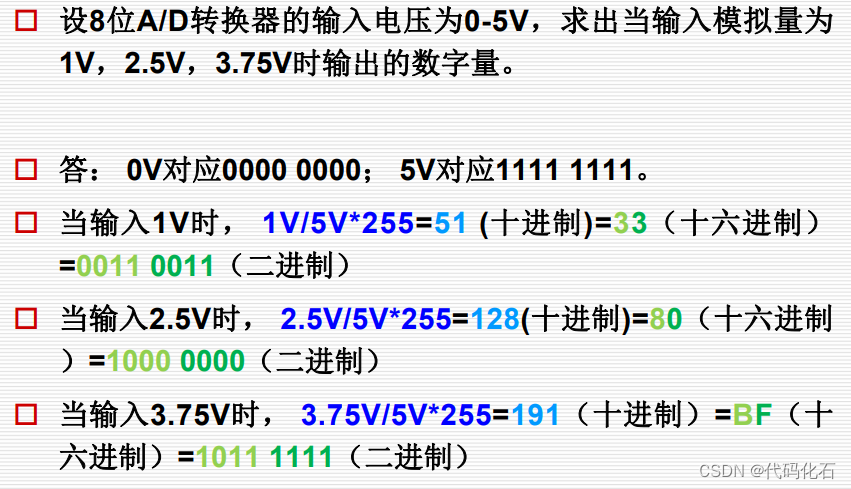
这个是模拟求数字
注意的是数字信号一定是二进制表达
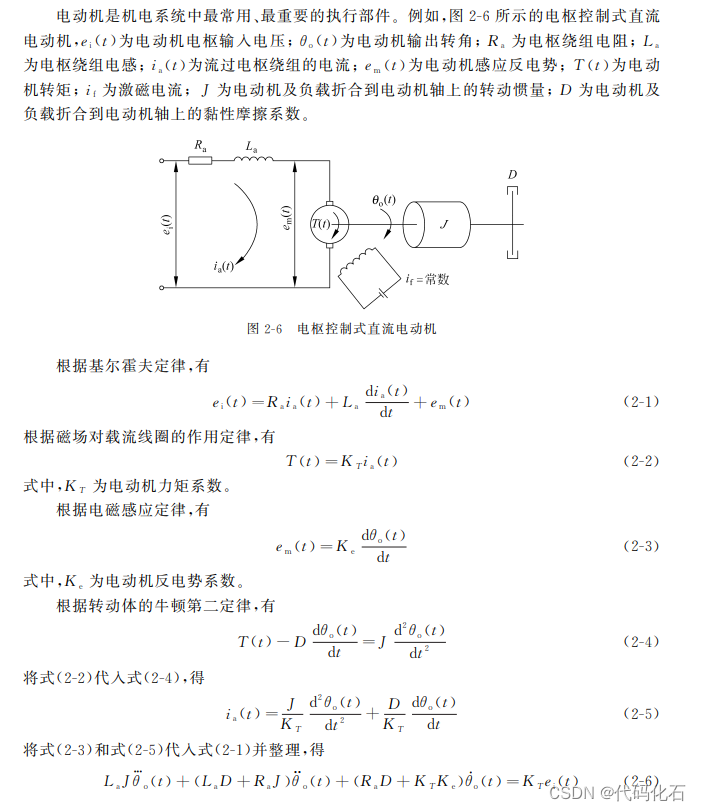
求微分方程
考试主要从电路知识里面考列出微分方程。
电阻:![]() 拉式变换 R
拉式变换 R
电容: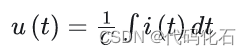 拉式变换 1/Cs
拉式变换 1/Cs
电感: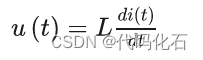 拉式变换 Ls
拉式变换 Ls
放大器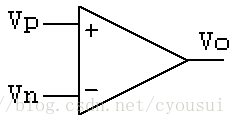

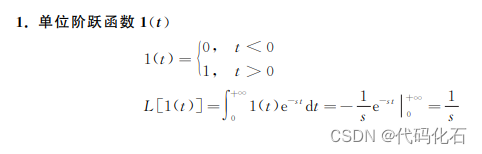
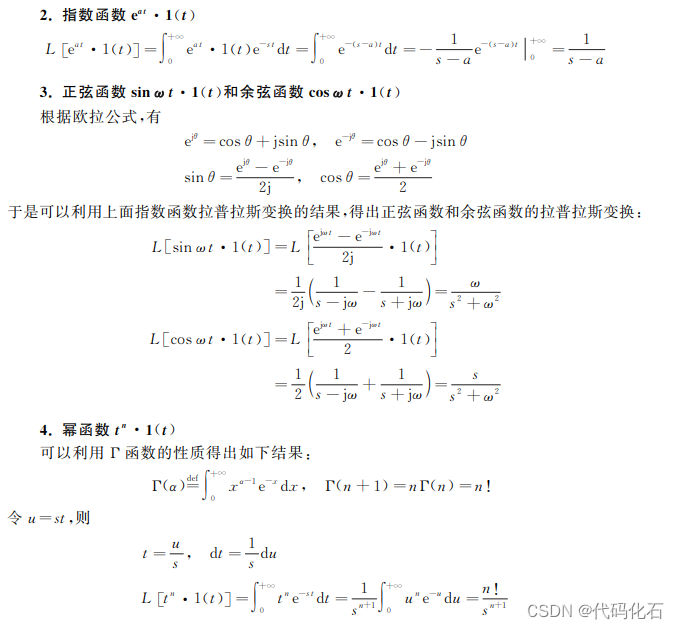
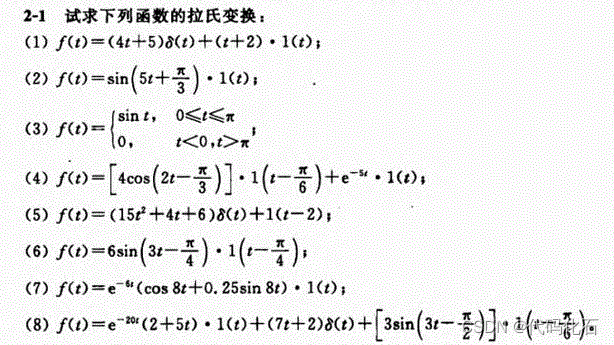
求拉式变换



求拉式反变换
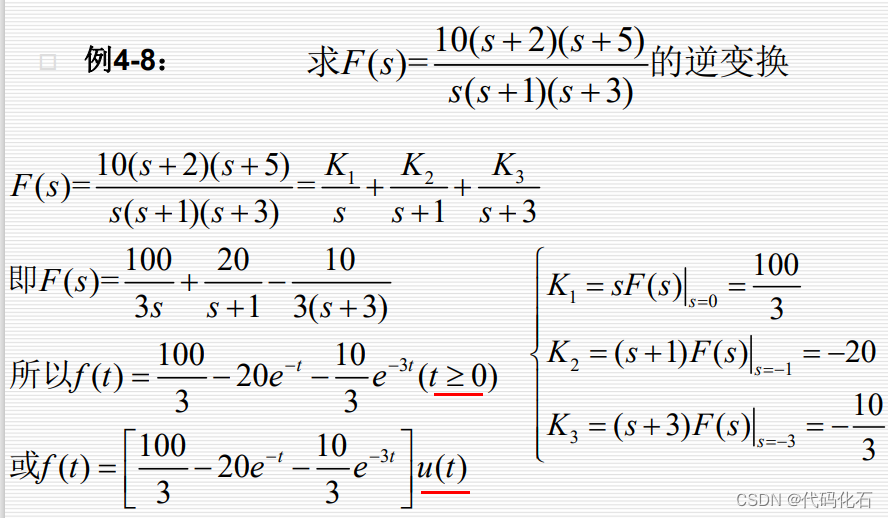
题目就像这样子考
结构图,主要考结构图变化
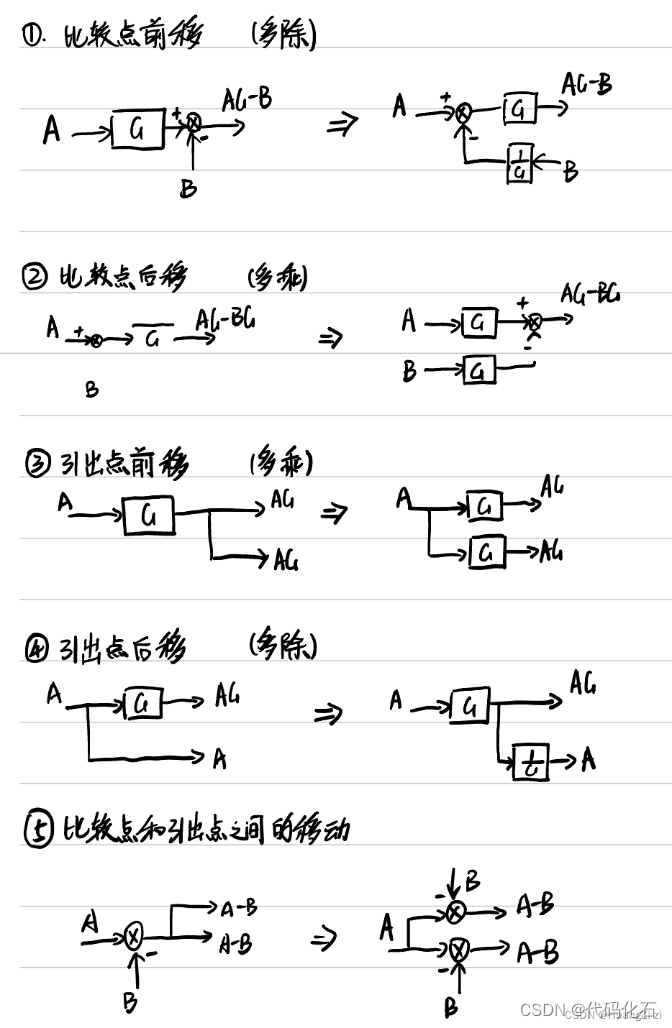

拿到图之后首先观察比较点和引出点的分布,如果是同类相邻就可以利用串联并联等效化简,如果是二者交错(就是比较点-引出点-比较点这样),就需要交换比较点与引出点。
梅逊公式:系统函数求解——梅森公式_哔哩哔哩_bilibili
(梅逊公式是一个秒杀的方法,如果考试懒得写步骤,就用梅逊公式求结果)
最小二乘法的基本算法
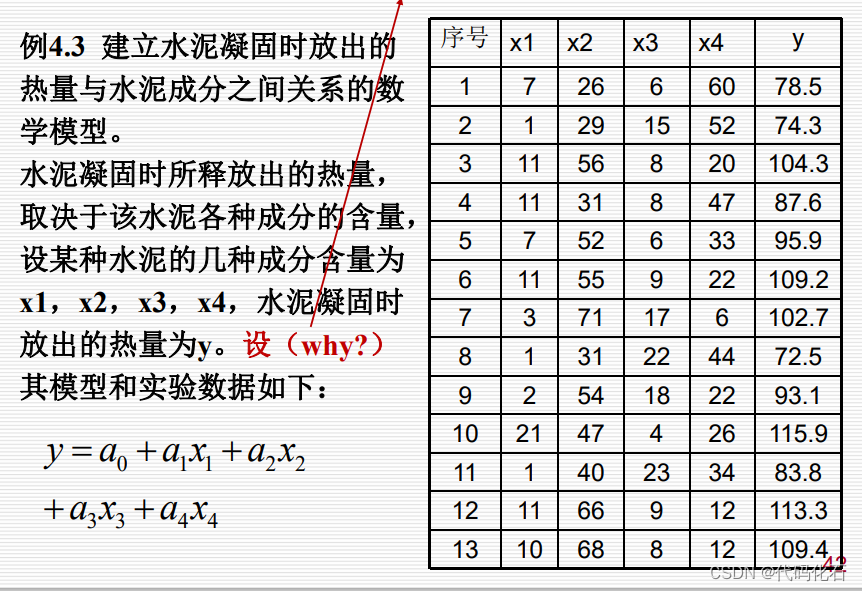
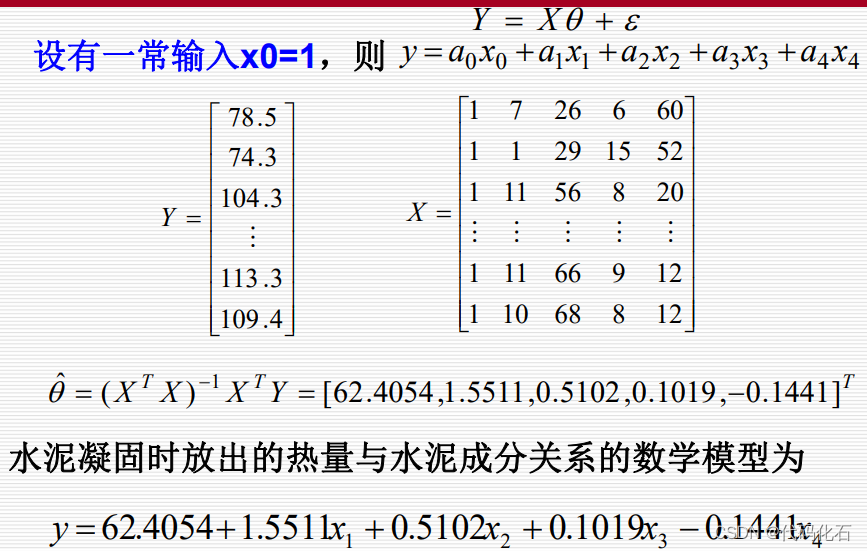
一般给出 这个公式,所以不必要记住
这个公式,所以不必要记住
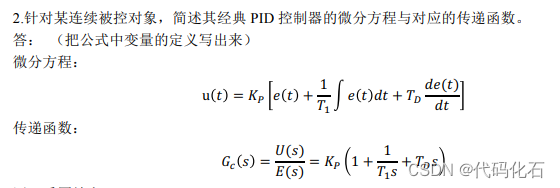
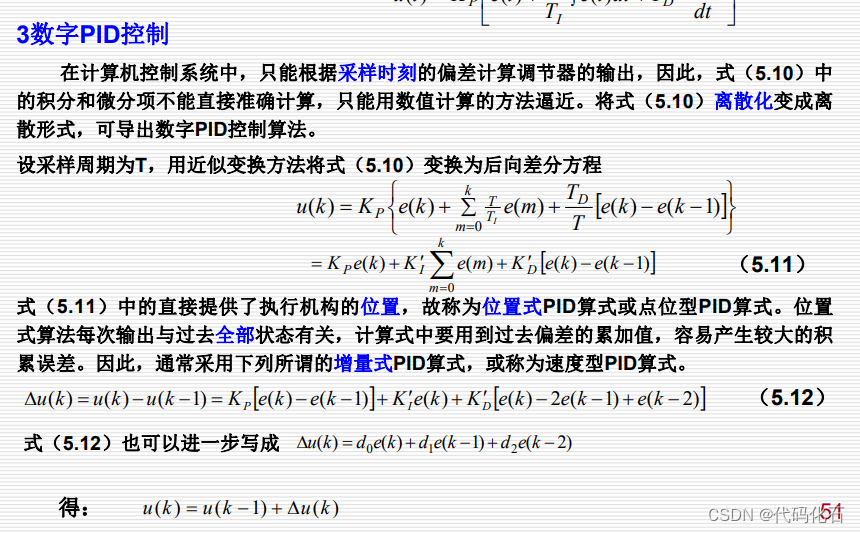
PID算法
由于第五章给的内容很理论,所以给几个重要知识点记

- 典型的改进PID控制算法包括哪些?他们的工作原理是什么?
微分先行PID控制算法:只对测量值进行微分,而不是对偏差进行微分,这样在设定值变化时,输出不会突变,而被控制量变化较为缓和。
积分分离PID控制算法:在偏差大到一定数值时,取消积分作用,而当偏差小于这个数值时,才引入积分作用。这样,既可以较少超调,又能够使得积分发挥消除静差的作用。
不完全微分PID控制算法:在PID控制的微分部分增加一阶惯性滤波,变成了不完全微分PID控制算法,虽然计算变得复杂,但是控制质量较好。
带死区的PID控制:在要求控制作用少变动的场合,可采用带死区的PID,带死区的PID实际上是非线性控制系统。
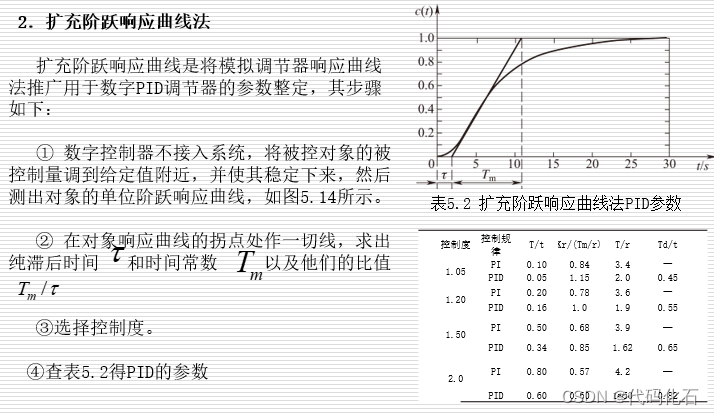
- PID控制器的参数整定方法有哪些?简述这几种方法确定PID控制参数的主要步骤。


交流电动机 直流电动机 变频器 控制电机
- 简述直流电动机基本原理。如何控制直流电机的速度?
直流电动机的工作原理是基于电磁感应和磁场的相互作用来实现能量转换的。当直流电源通过电刷接通电枢绕组时,电枢导体会有电流流过,从而产生磁场。这个磁场与转子(电枢)内部的永磁体或励磁线圈相互作用,产生力矩,使得转子按照指定的方向旋转。
调节串入电枢回路的外加电阻(调阻调速法或电阻控制法)
调节电动机的主磁通Φ(调磁调速法或励磁控制法)
调节电动机的电枢供电电压U(调压调速法或电压控制法)
- 简述交流电动机基本原理。如何控制交流电机的速度?
交流电动机主要由定子和转子两部分组成。定子包括铁心和绕组,当通过绕组中通入交流电流时,会在定子内产生一个旋转磁场。转子则由铁心和导体环组成,导体环通常被称为“鼠笼”,鼠笼中的导体在交流电源接通时会产生涡流,并与定子内的旋转磁场相互作用,导致鼠笼开始旋转。总的来说,交流电动机的工作过程是通过电流在磁场中的作用力,使转子产生旋转运动,从而将电能转换为机械能
调速方式:
电压调速
频率调速
转子电流调速
换频调速
变绕组调速
变阻调速
- 变频器的控制方式有哪些?介绍这些控制方式的工作原理。
V/F控制
异步电动机的转速由电源频率和极对数决定,所以改变频率,就可以对电动机进行调速。 但是频率改变时电动机内部阻抗也改变,仅改变频率,将会产生由弱励磁引起的转矩不足或由过励磁引起的磁饱和现象,使电动机功率因数和效率显著下降。
矢量控制
直流电动机构成的传动系统,其调速和控制性能非常优良。矢量控制按照直流电动机电枢电流控制思想,在交流异步电动机上实现该控制方法,并且达到与直流电动机相同的控制性能。
- 介绍伺服电机的特点及原理
依靠电枢电流与气隙磁通的作用产生电磁转矩,是伺服电动机转动。通常采用电枢控制方式,即在保持励磁电压不变的条件下,通过改变电枢电压来调节转速。电枢电压越小,则转速越低;电枢电压为零时,电动机停转。由于电枢电压为零时电枢电流也为零,电动机不产生电磁转矩,不会出现“自转”。
- 简述交流伺服电机的工作原理。如何控制交流伺服电机的速度?
交流伺服电动机结构与两相异步电动机相同,主要由定子和转子构成,它的铁芯上放置着空间位置相差为90°电角度的两相分布绕组,一相称为励磁绕组,另一相则称为控制绕组,交流伺服电动机线路中工作时励磁绕组与交流励磁电源相连,控制绕组加控制信号电压。
交流伺服电动机必须具备一个性能,就是能克服交流伺服电机的所谓“自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
可采用下列三种方法来控制伺服电机的转速高低及旋转方向。
幅值控制。保持控制电压与励磁电压间的相位差不变,仅改变控制电压的幅值。
相位控制。保持控制电压的幅值不变,仅改变控制电压与励磁电压间的相位差。
幅-相控制。同时改变控制电压的幅值和相位。
- 简述步进电机的工作原理。如何控制步进电机的位移和转速
1.工作原理
通常电机的转子为永磁体,当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。
2.控制方法
(1)通过控制脉冲个数来控制角位移量,从而达到准确定位的目的。
(2)通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
(3)改变脉冲的顺序改变步进电机的转动方向。
















 1755
1755











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









