







目录
7.1实验目的
1.了解温度调节闭环控制方法
2.掌握 PID 控制规律及算法。
7.2实验设备
PC 机一台,TDX-PITE 实验装置一套
7.3实验内容
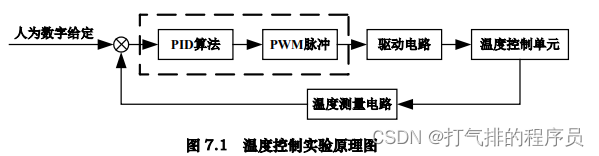
温度闭环控制原理如图 7.1 所示。人为数字给定一个温度值,与温度测量电路得到的温度值(反馈量) 进行比较,其差值经过 PID 运算,将得到控制量并产生 PWM 脉冲,通过驱动电路控制温度单元是否加热,从而构成温度闭环控制系统。
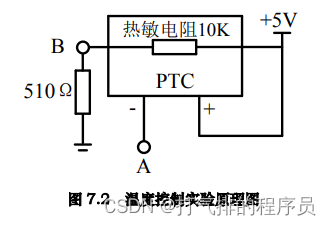
该单元采用一个 5V/60C/2~4W 的陶瓷加热片作为发热体,下面放置热敏电阻用于测温。线路连接如图 7-2 所示,只要在 A 端输入漏极开路的驱动信号,加热片即开始加热。热敏电阻的 B 端引出,用于连接 ADC 输入端的测量电路。
7.4实验原理
实验电路中采用的是 NTC MF58-103 型热敏电阻,实验电路连接如下
温度值与对应 AD 值的计算方法如下:
25C: Rt=10KVAD=5x500/(10000+500)=0.238(V) 对应AD 值: 0CH
30C:Rt=5.6KVAD=5x500/(5600+500)=0.410(V) 对应AD 值:15H
40C:Rt=3.8K VAD=5x500(3800+500)=0.581(V) 对应AD 值: 1EH
50C:Rt=2.7K VAD=5x 500 /(2700+500)=0.781(V) 对应AD 值: 28H
60C:Rt=2.1K VD=5x500 /(2100+500)=0.962(V) 对应AD 值: 32H
100C:Rt=900 VAD=5x500/(900 +500)=1.786(V)对应AD 值: 5AH
......
测出的 AD 值是程序中数据表的相对偏移,利用这个值就可以找到相应的温度值。例如测出的AD 值为 5AH=90,在数据表中第 90 个数为 64H,即温度值: 100C。
7.5实验步骤
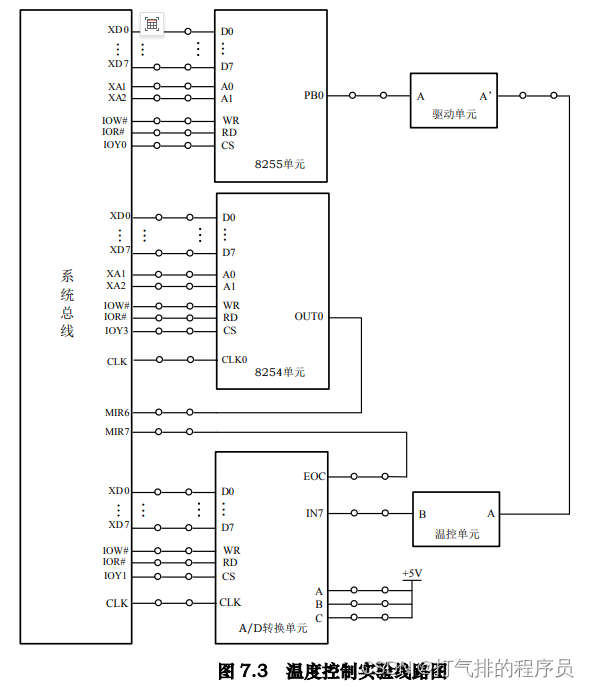
1.实验接线图如图 7.3 所示,按图连接实验线路图。
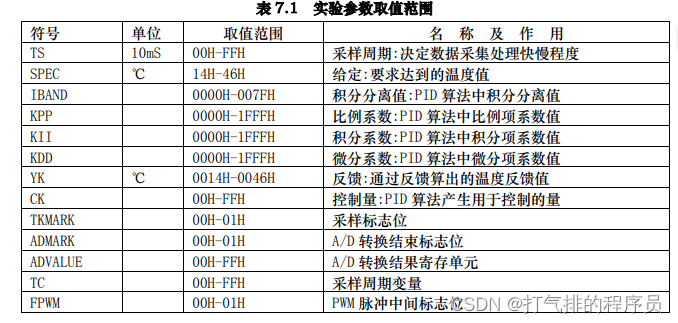
2. 编写实验程序(例程文件名为: Wendu.ASM) ,实验参数取值范围见表 7.1,编译、链接后装入系统。
;=========================================================
; 文件名: WENDU.ASM
; 功能描述: 温度闭环控制实验,通过专用图形显示界面观察
; 实验现象
; IOY0--8255, IOY3--8254, IOY1--AD0809
;=========================================================
SSTACK SEGMENT STACK
DW 256 DUP(?)
TOP LABEL WORD
SSTACK ENDS
DATA SEGMENT
TS DB 64H ;采样周期
SPEC DW 001DH ;给定温度值32H为50℃
IBAND DW 0040H ;PID算法中积分分离值
KPP DW 1F40H ;PID算法中比例项系数值
KII DW 0010H ;PID算法中积分项系数值
KDD DW 0010H ;PID算法中微分项系数值
CH1 DB ? ;专用图形显示的CH1通道
CH2 DB ? ;专用图形显示的CH2通道
CH3 DB ? ;专用图形显示的CH3通道
YK DW ? ;电机转速反馈量
CK DB ? ;电机转速控制量
TC DB ?
TKMARK DB ?
ADMARK DB ?
ADVALUE DB ?
FPWM DB ?
CK_1 DB ?
EK_1 DW ?
AEK_1 DW ?
BEK DW ?
AAAA DB ?
VAA DB ?
BBB DB ?
VBB DB ?
R0 DW ?
R1 DW ?
R2 DW ?
R3 DW ?
R4 DW ?
R5 DW ?
R6 DW ?
R7 DB ?
R8 DW ?
;热敏电阻温度表
TAB DB 14H,14H,14H,14H,14H,14H,14H,14H,14H,14H,15H,16H,17H,18H,19H,1AH
DB 1BH,1CH,1DH,1EH,1EH,1FH,20H,21H,23H,24H,25H,26H,27H,28H,29H,2AH
DB 2BH,2CH,2DH,2EH,2FH,31H,32H,32H,33H,34H,35H,36H,37H,38H,39H,3AH
DB 3BH,3CH,3DH,3EH,3FH,40H,42H,43H,44H,45H,46H,47H,48H,49H,4AH,4BH
DB 4CH,4DH,4EH,4FH,50H,4FH,50H,51H,52H,53H,54H,55H,56H,57H,58H,59H
DB 5AH,5BH,5CH,5DH,5EH,5FH,60H,61H,62H,63H,64H,64H,65H,65H,66H,66H
DB 67H,68H,69H,6AH,6BH,6CH,6DH,6EH,6EH,6FH,6FH,70H,71H,72H,73H,74H
DB 75H,76H,77H,78H,79H,7AH,7BH,7CH,7DH,7EH,7FH,80H,81H,82H,83H,84H
DB 84H,85H,86H,87H,88H,89H,8AH,8BH,8CH,8EH,8FH,90H,91H,92H,93H,94H
DB 95H,96H,97H,98H,99H,9AH,9BH,9BH,9CH,9CH,9DH,9DH,9EH,9EH,9FH,9FH
DB 0A0H,0A1H,0A2H,0A3H,0A4H,0A5H,0A6H,0A7H,0A8H,0A9H,0AAH,0ABH,0ACH
DB 0ADH,0AEH,0AFH,0B0H,0B0H,0B1H,0B2H,0B3H,0B4H,0B4H,0B5H,0B6H,0B7H
DB 0B8H,0B9H,0BAH,0BBH,0BDH,0BEH,0BEH,0C1H,0C2H,0C3H,0C4H,0C5H,0C6H
DB 0C8H,0CAH,0CCH,0CEH,0CFH,0D0H,0D1H,0D2H,0D4H,0D5H,0D6H,0D7H,0D8H
DB 0D9H,0DAH,0DBH,0DCH,0DDH,0DEH,0E3H,0E6H,0E9H,0ECH,0F0H,0F2H,0F6H
DB 0FAH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH
DB 0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH,0FFH
DB 0FFH,0FFH,0FFH,0FFH,0FFH
DATA ENDS
CODE SEGMENT
ASSUME CS:CODE,DS:DATA
START: MOV AX, DATA
MOV DS, AX
MAIN: CALL INIT ;系统初始化
STI
M1: CMP TKMARK, 01H ;判采样周期到否
JNZ M1
MOV TKMARK, 00H
M2: CMP ADMARK, 01H
JNZ M2
MOV ADMARK, 00H
MOV AX, 0000H ;查温度表
MOV AL, ADVALUE
MOV BX, OFFSET TAB
ADD BX, AX
MOV AL, [BX]
MOV YK, AX
CALL PID ;调用PID计算控制量 CK
MOV AL, CK ;根据 CK 产生 PWM 脉冲
SUB AL, 80H
JC IS0
MOV AAAA, AL
JMP COU
IS0: MOV AL, 00H
MOV AAAA, AL
COU: MOV AL, 7FH
SUB AL, AAAA
MOV BBB, AL
MOV AX, SPEC ;将给定量SPEC 存入 CH1
MOV CH1, AL
MOV AX, YK ;将反馈量YK 存入 CH2
MOV CH2, AL
MOV AL, CK ;将控制量CK 存入 CH3
MOV CH3, AL
CALL PUT_COM ;调用PUT_COM显示给定、反馈与控制量的波形
JMP M1
PUT_COM: ;显示子程序
MOV DX, 03FBH
IN AL, DX
AND AL, 7FH
OUT DX, AL
MOV DX, 03FDH
WAIT1: IN AL, DX
TEST AL, 20H
JZ WAIT1
MOV DX, 03F8H
MOV AL, CH1
OUT DX, AL
MOV DX, 03FDH
WAIT2: IN AL, DX
TEST AL, 20H
JZ WAIT2
MOV DX, 03F8H
MOV AL, CH2
OUT DX, AL
MOV DX, 03FDH
WAIT3: IN AL, DX
TEST AL, 20H
JZ WAIT3
MOV DX, 03F8H
MOV AL, CH3
OUT DX, AL
RET
INIT: NOP ;写中断入口地址
PUSH DS
XOR AX, AX
MOV DS, AX
MOV AX, OFFSET IRQ6 ;8259 IRQ10定时中断
MOV SI, 0038H
MOV [SI], AX
MOV AX, CS
MOV SI, 003AH
MOV [SI], AX
MOV AX, OFFSET IRQ7 ;8259 IRQ7中断
MOV SI, 003CH
MOV [SI], AX
MOV AX, CS
MOV SI, 003EH
MOV [SI], AX
CLI
POP DS
IN AL, 21H
AND AL, 3FH ;允许 IRQ6,IRQ7
OUT 21H, AL
MOV CK, 00H ;变量初始化
MOV YK, 0000H
MOV CK_1, 00H
MOV EK_1, 0000H
MOV AEK_1, 0000H
MOV BEK, 0000H
MOV BBB, 00H
MOV VBB, 00H
MOV R0, 0000H
MOV R1, 0000H
MOV R2, 0000H
MOV R3, 0000H
MOV R4, 0000H
MOV R5, 0000H
MOV R6, 0000H
MOV R7, 00H
MOV R8, 0000H
MOV TKMARK, 00H
MOV FPWM, 01H
MOV ADMARK, 00H
MOV ADVALUE, 00H
MOV AAAA, 7FH
MOV VAA, 7FH
MOV TC, 00H
MOV DX, 606H
MOV AL, 80H ;初始化 8255-B口
OUT DX, AL
MOV DX, 640H ;启动 ADC0809
OUT DX, AL
MOV DX, 6C6H
MOV AL, 36H ;8254 计数器0输出 OUT0
OUT DX, AL
MOV DX, 6C0H
MOV AL, 10H ;定时 10ms 方波
OUT DX, AL
MOV AL, 27H
OUT DX, AL
RET
IRQ7: NOP
PUSH AX
PUSH DX
MOV DX, 0640H
IN AL, DX ;读 ADC0809 采样值
MOV ADVALUE, AL
MOV ADMARK, 01H
MOV AL, 20H ;关闭 IRQ7
OUT 20H, AL
POP DX
POP AX
IRET
IRQ6: NOP
PUSH AX
PUSH DX
MOV DX, 0640H
OUT DX, AL ;启动 ADC0809
MOV AL, TC
CMP AL, TS
JNC TT2
INC TC
TT1: CALL KJ
MOV AL, 20H ;关闭 IRQ6
OUT 20H, AL
POP DX
POP AX
IRET
TT2: MOV TKMARK, 01H
MOV TC, 00H
JMP TT1
KJ: NOP ;PWM子程序
PUSH AX
CMP FPWM, 01H
JNZ TEST2
CMP VAA, 00H
JNZ ANOT0
MOV FPWM, 02H
MOV AL, BBB
CLC
RCR AL, 01H
MOV VBB, AL
JMP TEST2
ANOT0: DEC VAA
MOV DX, 0602H ;加温
MOV AL, 01H
OUT DX, AL
TEST2: CMP FPWM, 02H
JNZ OUTT
CMP VBB, 00H
JNZ BNOT0
MOV FPWM, 01H
MOV AL, AAAA
CLC
RCR AL, 01H
MOV VAA, AL
JMP OUTT
BNOT0: DEC VBB
MOV DX, 0602H ;停止加温
MOV AL, 00H
OUT DX, AL
OUTT: POP AX
RET
;==============================================
;PID算法子程序
;根据SPEC, KPP, KII, KDD及YK计算对应控制量CK
;==============================================
PID: MOV AX, SPEC ;求偏差EK
SUB AX, YK
MOV R0, AX
MOV R1, AX ;求偏差变化量AEK
SUB AX, EK_1
MOV R2, AX ;求BEK
SUB AX, AEK_1
MOV BEK, AX
MOV R8, AX
MOV AX, R1
MOV EK_1, AX
MOV AX, R2
MOV AEK_1, AX
TEST R1, 8000H
JZ EK1
NEG R1
EK1: MOV AX, R1 ;判积分分离值
SUB AX, IBAND
JC II
MOV R3, 00H
JMP DDD
II: MOV AL, TS ;计算积分项
MOV AH, 00H
MOV CX, R1
MUL CX
MOV CX, KII
DIV CX
MOV R3, AX
TEST R0, 8000H
JZ DDD
NEG R3
DDD: TEST BEK, 8000H ;计算微分项
JZ DDD1
NEG BEK
DDD1: MOV AX, BEK
MOV CX, KDD
MUL CX
PUSH AX
PUSH DX
MOV AL, TS
MOV AH, 00H
MOV CX, 0008H
MUL CX
MOV CX, AX
POP DX
POP AX
DIV CX
MOV R4, AX
TEST R8, 8000H
JZ DD1
NEG R4
DD1: MOV AX, R3 ;积分项和微分项相加,判溢出
ADD AX, R4
MOV R5, AX
JO L9
L2: MOV AX, R5
ADD AX, R2
MOV R6, AX
JO L3
L5: MOV AX, R6 ;计算比例项
MOV CX, KPP
IMUL CX
MOV CX, 1000H
IDIV CX
MOV CX, AX
RCL AH, 01H
PUSHF
RCR AL, 01H
POPF
JC LLL1 ;判溢出,溢出赋极值
CMP CH, 00H
JZ LLL2
MOV AL, 7FH
JMP LLL2
LLL1: CMP CH, 0FFH
JZ LLL2
MOV AL, 80H ;CK=CK_1+CK
LLL2: MOV R7, AL
ADD AL, CK_1
JO L8
L18: MOV CK_1, AL
ADD AL, 80H
MOV CK, AL
RET ;PID 子程序返回
L8: TEST R7, 80H ;溢出处理程序
JNZ L17
MOV AL, 7FH
JMP L18
L17: MOV AL, 80H
JMP L18
L9: TEST R3, 8000H
JNZ L1
MOV R5, 7FFFH
JMP L2
L1: MOV R5, 8000H
JMP L2
L3: TEST R2, 8000H
JNZ L4
MOV R6, 7FFFH
JMP L5
L4: MOV R6, 8000H
JMP L5
CODE ENDS
END START
3.下载程序完毕,打开专用图形界面,然后运行程序,
4.观察响应曲线。
5.改变 PID 参数IBAND、KPP、KII、KDD,重复实验,观察实验现象,找出合适的参数并记录。
注: 实验中给定值、反馈值都为单极性,屏幕最底端对应值为 00H,最顶端对应值为 FFH对于时间刻度值由于采样周期不同存在以下关系:
实际时间 (秒) = n(实际刻度值) 采样周期
控制量具有双极性,00H~7FH 为负值,80H~FFH 为正值。
温度闭环控制实验中,温度单元的 7805 控制范围的最佳温度范围为 50C~70C,不要过高。即给定值 SPEC 范围约在 14H(20C)~46H(70C)之间。示例程序中 SPEC = 32H为 60C。TS = 64H,由于 8253 0UT2 接 IRO6 中断为 10ms,故采样周期 = 64Hx10ms = ls; 如实际刻度值 n= 100,则实际响应时间(秒)= 1x100=100s。
实际实验现象结果如图 7.4 所示:
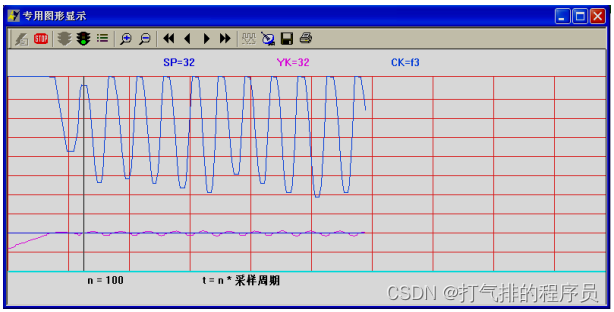
都是我自己测出来是这样的曲线,和老师核查可能是热敏电阻传感器损坏!!!





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











