






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
随着无人机技术的迅速发展,无人机在多个领域得到了广泛应用,包括航拍、测绘、物流、农业、军事等。然而,由于无人机在复杂的环境中运行,其可能会面临各种故障风险。及时准确地进行故障检测和诊断对于确保无人机的安全运行、提高任务成功率以及降低维护成本至关重要。 故障检测的重要性 1. 保障飞行安全:无人机在飞行过程中如果出现故障,可能会导致坠毁,对人员和财产造成严重威胁。通过故障检测,可以及时发现潜在问题,采取相应措施避免事故发生。 2. 提高任务可靠性:故障检测能够确保无人机在执行任务过程中保持良好的性能状态,提高任务的可靠性和成功率。 3. 降低维护成本:早期发现故障可以减少故障的严重程度,降低维修难度和成本。 总之,无人机故障检测和诊断是确保无人机安全运行和高效执行任务的重要环节。随着技术的不断进步,故障检测和诊断方法将不断完善,为无人机的广泛应用提供更加可靠的保障。
无人机故障检测和诊断研究文档
一、引言
随着无人机技术的飞速发展,无人机在军事、民用等领域的应用越来越广泛。然而,无人机在复杂环境中长时间运行,难免会出现各种故障。因此,无人机故障检测和诊断技术的研究显得尤为重要。本文将从无人机故障检测与诊断的意义、主要方法、常见故障类型及诊断流程等方面进行详细阐述。
二、无人机故障检测与诊断的意义
无人机故障检测与诊断是保障无人机安全、可靠运行的关键环节。通过及时、准确地检测和诊断无人机故障,可以迅速定位问题所在,采取相应措施进行修复,从而避免故障扩大,减少损失。同时,故障检测与诊断技术还可以提高无人机的维护效率,降低维护成本,为无人机的广泛应用提供有力保障。
三、无人机故障检测与诊断的主要方法
-
基于模型的诊断方法:通过建立无人机的数学模型,对模型进行仿真和分析,从而诊断出无人机的故障。这种方法需要对无人机的结构和原理有深入的了解,适用于较为简单的无人机系统。
-
基于知识的诊断方法:通过专家系统、模糊逻辑等技术,将专家的知识和经验应用于无人机故障诊断中。这种方法能够处理较为复杂的故障情况,但需要大量的专家知识和经验。
-
基于数据的诊断方法:通过分析无人机运行过程中产生的数据,提取出故障特征,从而诊断出无人机的故障。这种方法需要大量的数据支持,适用于大规模、复杂度的无人机系统。目前,基于数据的诊断方法是研究的热点,包括传感器检测、图像处理和无线通信等技术手段。
-
传感器检测:通过传感器监测无人机各个部件的状态,如机翼、电池、电机等,实时监测无人机的温度、压力、电压等参数,一旦发现异常情况,就能及时报警。
-
图像处理:利用无人机上的摄像头拍摄无人机的外观和内部结构,通过图像处理算法识别无人机的损坏部位。
-
无线通信:无人机通过无线通信设备将状态信息传输到地面控制站,维修人员可以通过地面控制站监测无人机的工作状态,及时发现故障。
-
四、无人机常见故障类型及诊断流程
-
机械故障:如螺旋桨损坏、电机故障、机身裂痕等。这类故障通常会影响无人机的飞行性能和稳定性,甚至可能导致飞行事故。诊断流程包括目视检查、功能测试和数据分析等步骤。
-
电气故障:包括电路短路、断路、元器件损坏等。这类故障需要使用万用表等工具检测电路通断和元器件性能,发现故障点后及时更换或修复。
-
导航与控制故障:可能导致无人机飞行不稳定、无法按预设航线飞行等。诊断流程包括检查GPS模块、惯性测量单元(IMU)和飞控板等核心部件是否正常工作,利用校准工具对设备进行校准。
-
摄像头及信号传输故障:摄像头故障可能表现为图像模糊、失真或无法传输图像;信号传输系统故障则可能导致遥控信号丢失或图传信号中断。诊断流程包括检查摄像头镜头是否清洁、连接线缆是否完好,以及检查天线是否损坏、信号接收设备是否工作正常。
五、结论与展望
无人机故障检测与诊断技术对于保障无人机安全、可靠运行具有重要意义。随着人工智能、大数据等技术的不断发展,无人机故障检测与诊断技术将趋向于智能化、自动化和高效化。未来,应进一步加强无人机故障检测与诊断技术的研究与应用,提高无人机的可靠性和稳定性,为无人机的广泛应用提供更加坚实的保障。
📚2 运行结果
主函数部分代码:
% Select the number of classes
classNum = 2;
feature_vec = sensor_sim_out';
% normal = repmat('normal', length(sensor_sim_out_normal'), 1);
% normal = cellstr(normal);
% fault = repmat('fault', length(sensor_sim_out_fault'), 1);
% fault = cellstr(fault);
% output_vec = vertcat(normal, fault);
output_vec = faultLabel;
%% Arrange training/test sets
% feature_vec_training .:. feature matrix for training
% output_vec_training .:. output vector for training
% training set (around %70 percent of whole data set)
trainingDataExNum = ceil(80 / 100 * (length(feature_vec)));
% Select %70 of data for training and leave the rest for testing
randomSelectionColoumnNum = randperm(length(feature_vec),trainingDataExNum);
% Training set for feature and output
feature_vec_training = feature_vec(randomSelectionColoumnNum, :);
output_vec_training = output_vec(randomSelectionColoumnNum, :);
% Test set for feature and output
feature_vec_test = feature_vec;
feature_vec_test(randomSelectionColoumnNum, :) = [];
output_vec_test = output_vec;
output_vec_test(randomSelectionColoumnNum, :) = [];
test_set_time = t_s;
test_set_time(randomSelectionColoumnNum) = [];
%% TRAINING PHASE
% SVMModel is a trained ClassificationSVM classifier.
tic
SVMModel = fitcsvm(feature_vec_training,output_vec_training,'Standardize', true, 'ClassNames',{'nominal','fault'});
toc
% Support vectors
sv = SVMModel.SupportVectors;
ScoreSVMModel = fitPosterior(SVMModel);
%% CROSS VALIDATION
% 10-fold cross validation on the training data
% inputs : trained SVM classifier (which also stores the training data)
% outputs : cross-validated (partitioned) SVM classifier from a trained SVM
% classifier
% CVSVMModel is a ClassificationPartitionedModel cross-validated classifier.
% ClassificationPartitionedModel is a set of classification models trained
% on cross-validated folds.
CVSVMModel = crossval(SVMModel);
% Assess performance of classification via Matlab tools
% To assess predictive performance of SVMModel on cross-validated data
% "kfold" methods and properties of CVSVMModel, such as kfoldLoss is used
% Evaluate 10-fold cross-validation error.
% (Estimate the out-of-sample misclassification rate.)
crossValClassificErr = kfoldLoss(CVSVMModel);
% Predict response for observations not used for training
% Estimate cross-validation predicted labels and scores.
[elabel,escore] = kfoldPredict(CVSVMModel);
max(escore)
min(escore)
% [ScoreCVSVMModel,ScoreParameters] = fitSVMPosterior(CVSVMModel);
%% Assess performance of classification via confusion matrix
%% FIT POSTERIOR PROBABILITES fitPosterior(SVMModel) / fitSVMPosterior(CVSVMModel)
% "The transformation function computes the posterior probability
% that an observation is classified into the positive class (SVMModel.Classnames(2)).
% The software fits the appropriate score-to-posterior-probability
% transformation function using the SVM classifier SVMModel, and
% by conducting 10-fold cross validation using the stored predictor data (SVMModel.X)
% and the class labels (SVMModel.Y) as outlined in REF : Platt, J.
% "Probabilistic outputs for support vector machines and comparisons
% to regularized likelihood methods". In: Advances in Large Margin Classifiers.
% Cambridge, MA: The MIT Press, 2000, pp. 61?74"
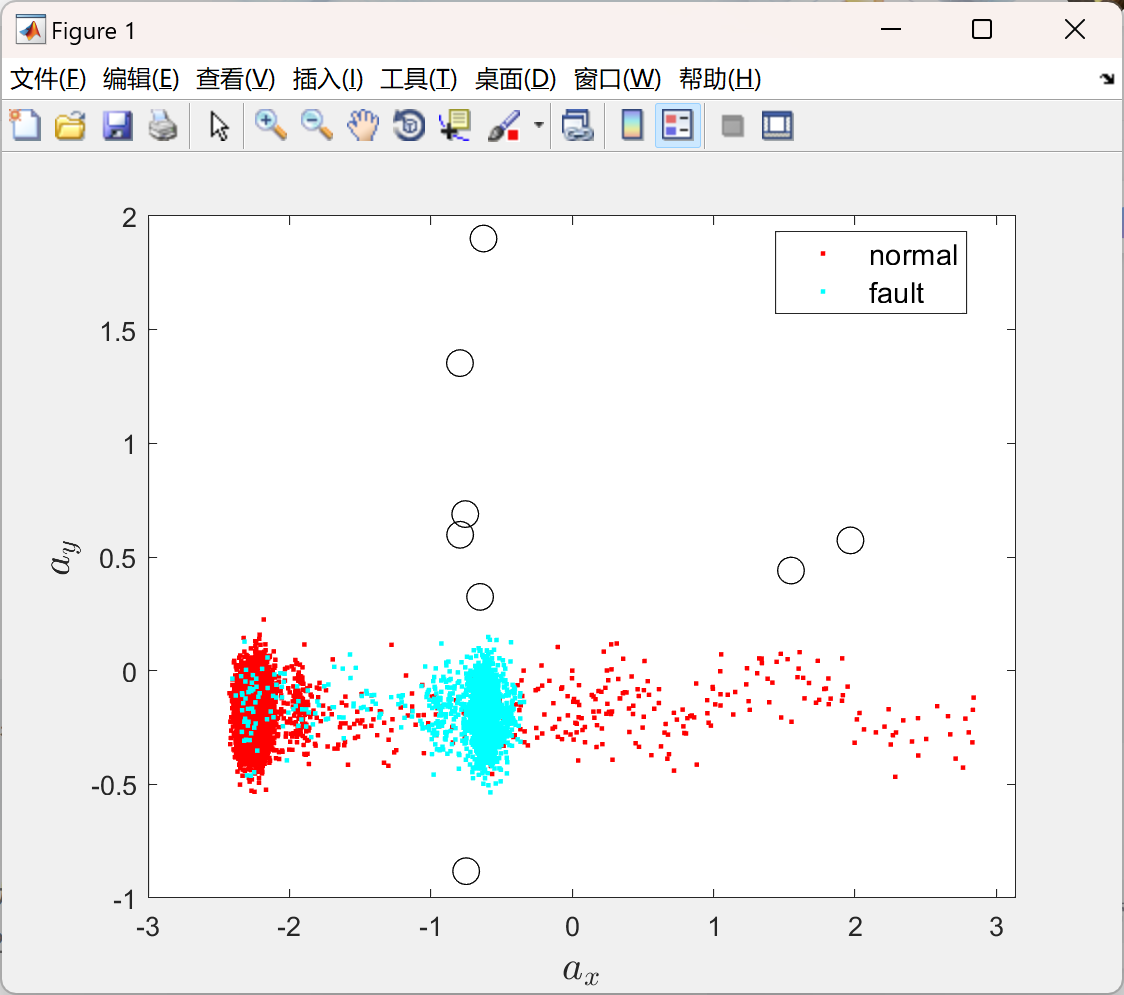
%% Plot results
figure
gscatter(feature_vec(:,1),feature_vec(:,2),output_vec)
hold on
plot(sv(:,1),sv(:,2),'ko','MarkerSize',10)
% legend('normal','fault','Support Vector')
legend('normal','fault')
hold off
set(legend,'FontSize',11);
xlabel({'$a_x$'},...
'FontUnits','points',...
'interpreter','latex',...
'FontSize',15,...
'FontName','Times')
ylabel({'$a_y$'},...
'FontUnits','points',...
'interpreter','latex',...
'FontSize',15,...
'FontName','Times')
print -depsc2 feat1vsfeat2.eps
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]戴凌宇,程赟,冯张棋,等.基于故障发生程度的四旋翼无人机故障诊断[J].现代机械,2024(04):77-83.DOI:10.13667/j.cnki.52-1046/th.2024.04.004.
[2]江宜瑞,李宇,薛强,等.人工智能无人机在输电线路故障检测中的应用[J].工业控制计算机,2024,37(08):163-164.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









