









作者:卢智勇 重庆理工大学
摘要
-
解决噪声与焊缝区域对比度低导致的识别缺陷 ---提出改进的Canny算子边缘检测算法
-
解决焊缝表面缺陷检测效率与精确度低 ---提出改进yolov5模型算法
-
实现焊缝缺陷智能化检测 ---基于PyQt和OpenCV实现焊缝缺陷检测系统
关键词
焊缝缺陷检测;深度学习;机器视觉;边缘检测;YOLOv5
研究背景及意义
焊接过程多样且复杂,焊缝缺陷难以避免,常有咬边、焊瘤、飞溅等表面缺陷与裂纹、夹渣、气孔、未焊透等内部缺陷。
这些缺陷威胁制造业可持续发展,问题亟待解决。
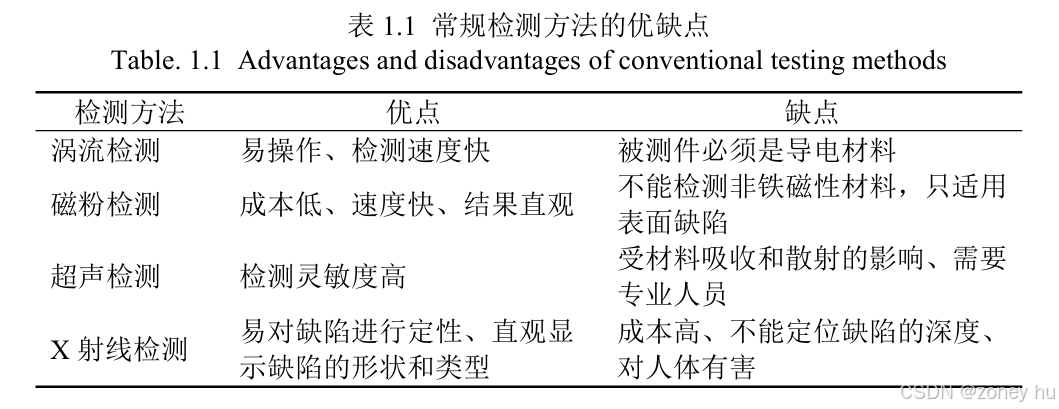
当前 表面缺陷常用:目测检查 内部缺陷常用:磁粉检测、超声波检测、涡流检测、射线检测等无损检测技术
人工检测 高度依赖人工经验、低效、不够全面,易出现错检、漏检
于是 基于机器视觉的焊缝缺陷检测技术能提高焊接质量的稳定性,降低人为因素影响:
-
提高效率
-
提高准确率
-
减少损失和事故
国内外研究现状
-
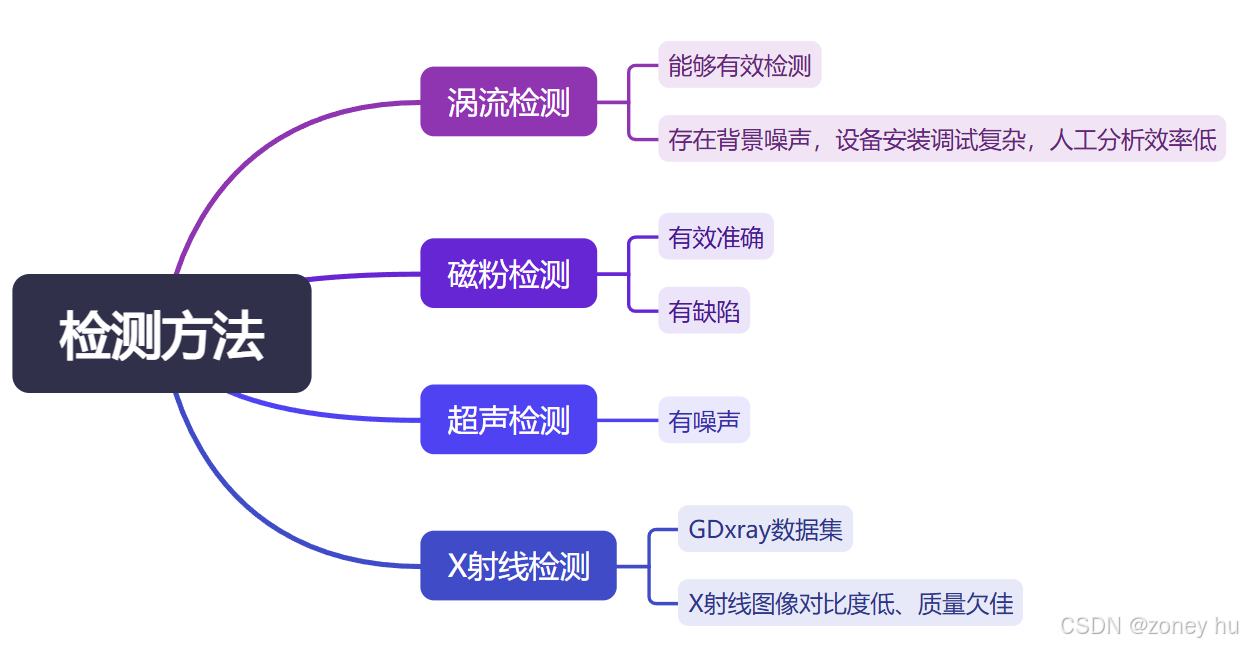
常规检测方法
-
基于机器视觉方法
主动视觉:利用结构光等附加光源辅助定位特征点,以获取更好的图像信息 被动视觉:利用CCD摄像机直接采集工件图像,依赖焊接过程中自然产生的图像信息
传统机器学习: 分割、提取、分类
深度学习:克服了传统方法中特征设计的主观性和限制性
两阶段检测模型:R-CNN、Fast R-CNN、Faster R-CNN
单阶段检测模型:YOLO系列 检测速度快,准确率高
主要内容
-
解决噪声与对比度低问题,提升图像质量
-
改进Canny算法
-
改进YOLOv5网络模型
-
集成系统

















 694
694

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









