






第三章传感器与传感网技术
第三章传感器与传感网技术
传感器概述
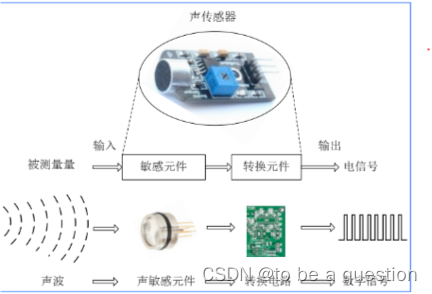
传感器(sensor)是由敏感元件和转换元件组成的种检测裝置,能感受到被测量,并能将检测和感受到的信息,按一定规律变换成为电信号(电压、电流、频率或相位)输出,以满足感知信息的传输、处理、存储、显示、记录和控制的要求
结构与工作原理示意图
传感器的分类
传感器分类的基本方法:
- 根据传感器功能分类
- 根据传感器工作原理分类
- 根据传感器感知的对象分类
- 根据传感器的应用领域分类
常用的物理传感器与化学传感器
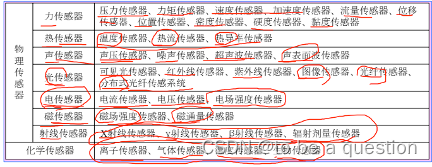
物理传感器
物理传感器的原理是利用力、热、声、光、电、磁、射线等物理效应,将被测信号量的微小变化转换成电信号
物理传感器可以进一步分为:力传感器、热传感器、声传感器、光传感器、电传感器、磁传感器与射线传感器等7类
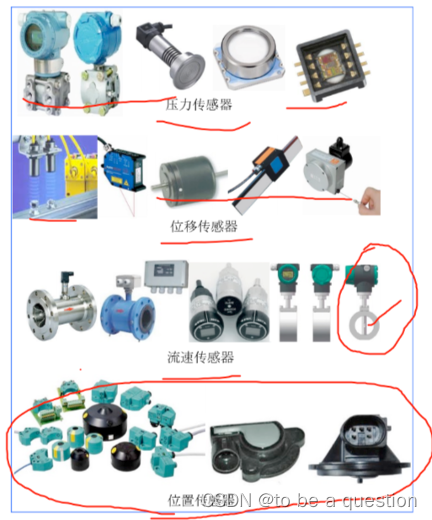
传感器介绍
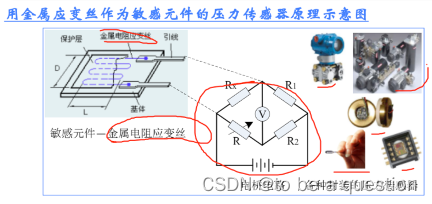
力传感器
力传感器是能感受外力并将其转换成可用输出信号的传感器
力传感器是能感受外力并将其转换成可用输出信号的传感器力传感器的种类繁多,常用的力与压力传感器有电阻应变式、半导体应变式、压阻式、电感式、电容式、谐振式压力传感器,以及光纤压力传感器等
原理示意图:
用途:
温度传感器

声传感器

光传感器

分布式光纤传感系统
分布式光纤传感系统利用光纤作为传感敏感元件和传输信号介质,探测出沿着光纤不同位置的温度和应变的变化,实现分布、自动、实时、连续、精确的测量
分布式光纤传感系统应用领域包括:
- Ø 智能电网的电力电缆表面温度检测、事故点定位
- Ø 发电厂和变电站的温度监测、故障点检测和报警
- Ø 水库大坝、河堤安全与渗漏监测
- Ø 桥梁与高层建筑结构安全性监测
- Ø 公路、地铁、隧道地质状况的监测
分布式光纤温度传感系统可以在易燃、易爆的环境下同时测量上万个,可以对每个温度测量点进行实时测量与定位
电传感器
电传感器可以分为:电阻式、电容式、电感式传感器
- Ø 电阻式传感器利用变阻器将非电量转换成电阻信号的原理制成的,电阻式传感器主要用于位移、压力、应变、力矩、气流流速、液面与液体流量等参数的测量
- Ø 电容式是利用改变电容器的几何尺寸或介质参数,来使电容量变化的原理制成的;电容式传感器主要用于压力、位移、液面、厚度、水分含量等参数的测量
- Ø 电感式是利用改变电感磁路的几何尺寸或磁体位置,来使电感或互感量变化的原理制成的,主要用于压力、位移、力、振动、加速度等参数的测量
磁传感器
- 磁传感器是最古老的传感器,指南针是磁传感器的最早的一种应用
- 磁传感器将磁信号转化成为电信号输出
- 磁电式传感器目前已经被高性能磁敏感材料的新型磁传感器所替代

射线传感器
射线传感器是将射线强度转换出可输出的电信号的传感器
- Ø 射线传感器可以分为:X射线传感器、γ射线传感器、β射线传感器、辐射剂量传感器
- Ø 射线传感器已经在环境保护、医疗卫生、科学研究与安全保护领域广泛使用
化学传感器
化学传感器可以将化学吸附、电化学反应过程中被测信号的微小变化转换成电信号的一类传感器
- Ø 按传感方式的不同,可分为:
- —接触式化学传感器
- —非接触式化学传感器
- Ø 按结构形式的不同,可以分为:
- —分离型化学传感器
- —组装一体化化学传感器
- Ø 按检测对象的不同,可以分为:
- —气体传感器
- —离子传感器
- —湿度传感器
生物传感器
生物传感器是由生物敏感元件和信号传导器组成
Ø 生物敏感元件可以是生物体、组织、细胞、酶、核酸或有机物分子
Ø 不同的生物元件对于光强度、热量、声强度、压力有不同的感应特性
分类:
- 输出信号方式:生物亲和型生物传感器、代谢型生物传感器与催化性生物传感器
- 分子识别元件:酶传感器、微生物传感器、组织传感器、细胞传感器与免疫传感器
- 信号转换器:电化学生物传感器、半导体生物传感器、测热型生物传感器、测光型生物传感器、测声型生物传感器
纳米传感器
定义:任何一种传感器只要具备以下属性之一者都可以称为纳米传感器。这些属性是:
- Ø传感器大小是纳米级的
- Ø传感器灵敏度是纳米级的
- Ø传感器与被观测物之间的相互作用距离在纳米级的
特点:
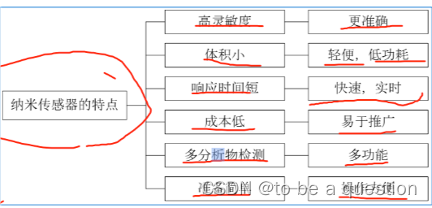
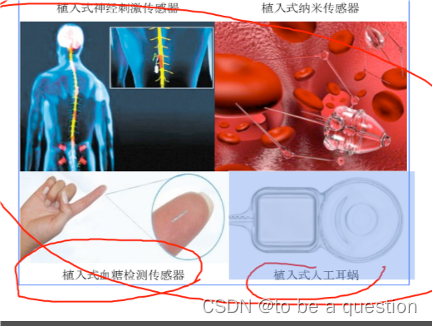
例子:
分类:
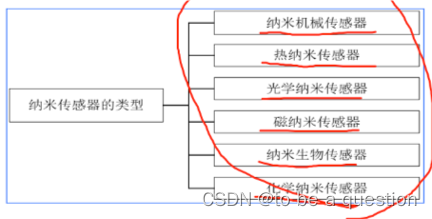
- 纳米传感器包含利用纳米结构(至少一个维度上横向尺寸小于100nm,同时其他维度上尺寸小于1μm)的环境中传递信息
- Ø从纳米传感器定义可以看出:纳米传感器必须遵循几何尺寸上达到纳米量级的要求
- Ø体积小的纳米传感器可以作为植入式传感器,应用于疾病医疗与健康监测之中
传感器性能指标
- Ø线性度
- Ø灵敏度
- Ø分辨率
- Ø迟滞
- Ø重复性
- Ø漂移
- Ø测量范围
- Ø精度
智能传感器
特点:
- Ø自学习、自诊断与自补偿能力
- Ø复合感知能力
- Ø灵活的通信能力
MEMS与NEMS技术是MEMS与NEMS是在微电子技术基础上发展起来的多学科交叉的新兴学科,
它以微电子及机械加工技术为依托,研究涉及微电子学、机械学、力学、自动控制科学、材料科学等多个学科
- 20世纪60年代,科学家开始了MEMS技术的研究
- 80年代微型硅加速度计、微型硅陀螺仪、微型硅静电马达相继问世
- 90年代科学家开展了NEMS技术的研究与纳米传感器器件制备
无线传感器
UGS的无线传感器的研究与应用
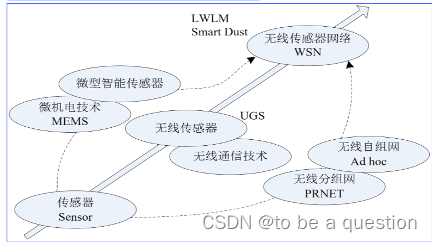
无线传感器网络
从无线分组网到无线自组网
IEEE将无线自组网定义为一种特殊的自组织、对等式、多跳、无线移动网络(MANET),它是在无线分组网的基础上发展起来的
无线自组网有多个英文名称,如Ad hoc network 、Self-organizing network、Infrastructureless network 与Multi-hop network
1991年5月,IEEE正式采用“Ad hoc网络”术语, Ad hoc在英语中的含义是“for the specific purpose only”,即“专门为某个特定目的、即兴的、事先未准备的”意思

无限能自组网的特点:
- Ø自组织与独立组网
- Ø无中心
- Ø多跳路由
- Ø动态拓扑
- Ø无线传输的局限与节点能量的限制
- Ø网络生存时间的限制
从无线自组网到无线传感器网网络
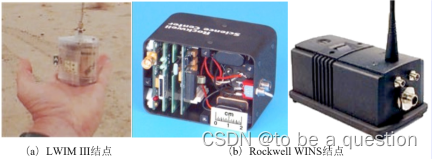
LWIM 与WINS无线传感器网络的研究
智能尘埃项目的研究
智能尘埃(Smart Dust)项目研究的目标是通过MEMS技术,实现传感、计算与通信能力的集成,用智能传感器技术去增强微型机器人环境感知与智慧处理能力
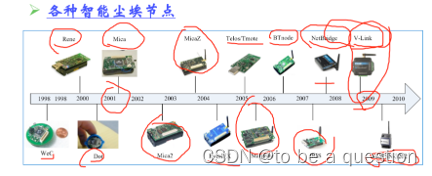
无线传感器网络技术发展的过程
无线传感器网络
无线传感器网络特点:
- 网络规模
- 自组织网络
- 拓扑结构的动态变化
- 以数据为中心
无线传感器网络的基本结构
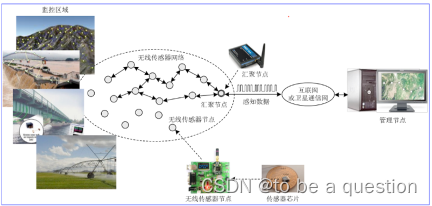
无线传感器网络节点类型:
- 传感器节点
- 汇聚节点
- 管理节点
电源能量对无线传感器节点设计的限制
Ø 无线传感器节点通常是一个微型的嵌入式系统,它的处理能力、存储能力和通信能力相对较弱,通过自身携带的能量有限的电池(钮扣电池或干电池)供电
Ø 汇聚节点既可以是一个具有增强功能的传感器节点,有足够的能量提供给更多的内存与计算资源,也可以是没有监测功能仅带有无线通信接口的特殊网关设备
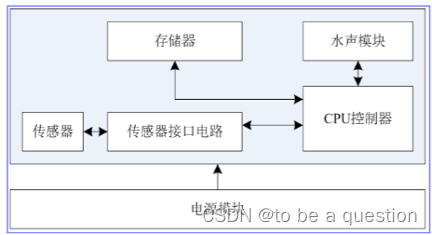
无线传感器网络结构
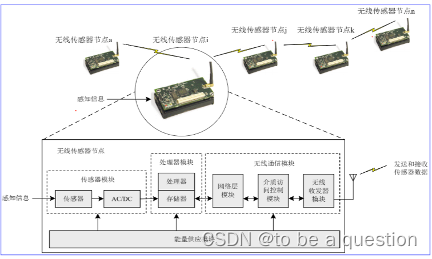
无线传感器节点模块的功能
- 传感器模块:传感器完成监控区域内信息感知和采集,AC/DC电路将模拟信号转换成数字信号
- 处理器模块:负责控制整个传感器节点的操作,存储和处理传感器采集的数据,以及其他节点传送来的数据
- 无线通信模块:负责与其他传感器节点进行无线通信,网络层模块负责完成数据包的传输路由选择,介质访问控制模块负责协调多节点对公共通信信道的访问控制,无线收发器模块负责数据信号的发送和接收
无线传感器节点设计的原则
- 微型化
- 低成本
- 低功耗
- 灵活性
- 鲁棒性
研究与发展

无线传感器与执行器网络
背景导入:
随着WSN在环境监测、智能医疗、智能交通与军事领域应用的深入,人们认识到:在某些应用环境中必须将执行器与传感器结合起来,**无线传感器与执行器网络(Wireless Sensor and Actor Networks,WSAN)**研究被提上日程
小型、智能、自治、低能耗、低成本执行器研发的速度,使得WSAN成为可能;目前WSAN已经在工业生产线的工业机器人、军事上广泛应用的无人机、未来战士、防暴机器人、运输机器人中已经应用
作为物联网主要支撑技术的下一代无线传感器网络,WSAN有望应用于防灾救灾、智能工业、智能农业、智能家居、智能交通、智能医疗等应用领域,同时WSAN的应用又进一步推动了普适计算、CPS与环境智能化研究的发展
基本原理
传感器节点和执行器节点的区别
- 传感器节点是静态不移动的,执行器节点是移动的
- 部署在监控区域的传感器节点数量很多,而执行器节点不需要很多,关键要看它执行能力的强弱
- WSAN要求传感器节点与传感器节点、传感器节点与执行器节点、执行器节点与执行器节点之间要能够协同通信
WSAN的主要特点
- 异构性
- 实时性
- 移动性
- 协作性
WSAN的执行机制
协同机制
自主机制与半自主机制
无线多媒体传感网络
WMSN(Wireless Multimedia Sensor Network)的基本概念
在军事战场监控与评估、机器人视觉、交通监控、车辆主动安全、医疗监护、智能家居、环境监控、工业工程控制等实际应用中,需要对视频、音频、图像等多媒体信息的感知、传输和处理,需要比传统的WSN更为直观、更清晰的信息
WMSN是在传统的WSN的基础上引入视频、音频、图像等多媒体信息感知、传输与处理功能的新型WSN
WMSN能够更准确、直观地反映现场,感知信息更丰富,它的研究与应用将会推进物联网和普适计算的实现
无线多媒体传感器网络结构设计基本思路
分类、分级结构的WMSN
- 单层网络结构
- 集中式处理的单层网络结构
- 异构的多层网络结构

水下无线传感网络
(Underwater Wireless Sensor Network,UWSN)
引入背景
随着无线传感器网络与水下机器人技术的逐渐成熟,研究人员自然会想到:如何将WSN概念和水下机器人技术结合在一起,应用于海洋自然资源探测、水域污染监控、近海勘探、灾难预警、辅助导航与战术监控等领域中
- Ø水下传感器网络主要利用声波实现通信和组网,“水下声传感器网络”或“水下无线传感网络”
- Ø水下无线传感网络中解决间歇性、长时延、高误码率和高包丢失率所引发的容迟问题,是一个困难的研究课题
UWSN与陆地WSN的区别
- 陆地WSN节点造价相当于水下无线传感网络节点便宜,UWSN要考虑防水、防腐蚀等问题,结构相对复杂,造价必然会高,水下设备更新与维护的费用也相对高一些
- 由于UWSN节点的造价高,因此它不可能像陆地WSN部署那么密集,也不可能不加固定的任其漂流,UWSN的传感器节点相对比较少
- 声波在海水中传播时衰减很大,在水下通信节点之间的距离与陆地上相同时,需要的能量消耗要大得多,因此水下传感器节点需要储备更多的能量
- 陆地WSN一般存储空间都比较小,而水下声波信道是间歇性的,水下传感器节点需要将感知数据存储起来,因此水下传感器节点需要使用容量大一些的存储器
水下节点类型
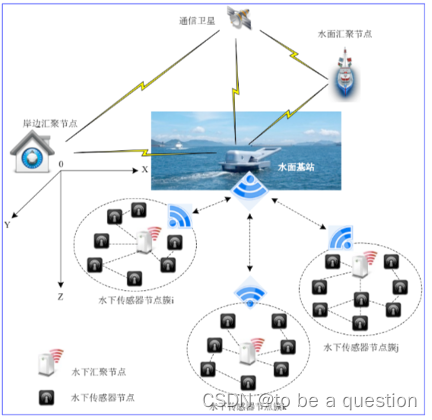
自主式水下航行器(AUV)完成与水下传感器的通信、感知数据查询与网络管理功能
- Ø由于自主式水下航行器承担的任务的不同,有些自主式水下航行器像小型的潜水艇,有些水下机器人也可以成为自主式水下航行器
- Ø很多种自主式水下航行器在海里接收水下传感器传送的数据,当浮出水面时将数据通过无线信道传送给水上基站,水上基站再通过水面汇聚节点将数据转发到岸边汇聚节点
网络结构
三维水下传感器网络的水下传感器节点悬浮在不同的深度和位置,形成一个能够监测三维海洋信息的传感器网络
AUV传感器网络
自主式水下航行器(Autonomous Underwater Vehicle,AUV)又称为“水下自主机器人”由水下自主机器人组成的传感器网络称为“移动水下传感器网络”

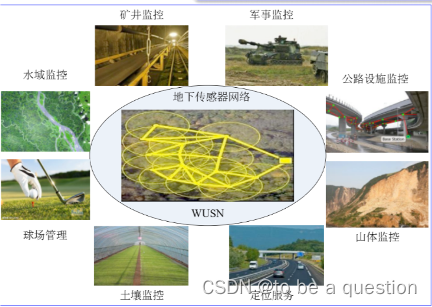
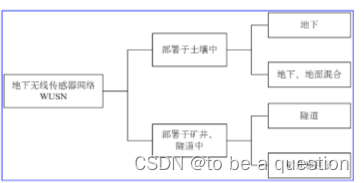
地下无线传感器网络(WUSN)
地下无线传感器网络(Wireless Underground Sensor Network ,WUSN)
特点
- 噪声
- 路径损耗
- 反射/折射
- 多径衰减
- 传播速度降低
WUSN的结构

WUSN的主要优点
- 隐蔽性好
- 易于部署
- 实时性好
- 可靠性高
- 覆盖密度高
无线纳米传感器网络
- 集成纳米传感器系统的研究
- Ø将适合纳米器件信息处理与传输的信号处理单元与纳米传感器集成的系统称为“集成纳米传感器系统(Integrate NanoSensor System,INS)”
- Ø目前研究人员正在致力于INS的接口标准、自校验、容错与数字补偿的研究,以提高系统的精度、动态范围与可靠性
- Ø集成纳米传感器系统研究为纳米传感器节点的设计与制造技术奠定了基础
- 纳米级器件通信技术的研究
预期在纳米级器件通信技术的研究中采用的技术路线主要有两种
- Ø第一种是分子通信,即研究分子之间通信的信号编码、发送与接收方法
- Ø第二种是纳米电磁通信,即研究新型纳米材料发送和接收来自组分的电磁辐射
- Ø在纳米传感器电磁通信研究中主要集中在纳米天线与纳米收发器的研究上
- 纳米电池技术的研究
- Ø为了配合基于主动型纳米传感器的NWSN节点的研究,目前科研人员正在开展锂纳米电池、自供电纳米发动机、太阳能利用技术的研究
- Ø锂纳米电池作为未来纳米传感器的小型电源的可行性已经得到证实
- Ø自供电纳米发动机是研究从环境中收集的能量、化学能、人体的运动、振动、声波、建筑物震动的能量,人讲话、车辆或其他噪声为纳米传感器所用的电能















 745
745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









