






 本文介绍了如何在Ubuntu22.04系统上搭建PULPino开发环境,包括Python2、Modelsim和定制的riscv工具链的安装,以及运行helloworld例程的过程,包括解决遇到的问题和调试步骤。
本文介绍了如何在Ubuntu22.04系统上搭建PULPino开发环境,包括Python2、Modelsim和定制的riscv工具链的安装,以及运行helloworld例程的过程,包括解决遇到的问题和调试步骤。
一、前言
PULPino是ETH开发的一个开源32-bit RISC-V单核微控制器系统,可以认为是PULP的简化版。目前内核支持RISCY和zero-riscy两种配置,此外还有支持AXI总线和APB总线,并可配置多个外设ip如SPI,UART,I2C等,支持boot ROM和外部SPI flash启动等等。由于github上该项目已多年未更新且,里面的Issues也很少能得到官方回复,因此整理一份环境建立以及跑通helloworld的流程供参考。
二、系统环境
本人使用的是Ubuntu 22.04的Linux系统,以下两种方式都尝试并成功
- 若使用虚拟机,可以选择VMware Workstation 17 Player,官方的个人免费版,下载安装即可用;
- 若是Window11系统,可以使用WSL2,支持包括Ubuntu 22.04版本内的多种系统可选
三、软件安装
PULPino仿真流程需要Python2及pip2,Modelsim以及riscv编译工具链
3-1 Python2及pip2安装
PULPino由于多年没有更新,不支持Python3只支持Python2和pip2。Python2的安装方式可以参考《在 Ubuntu20.04 上安装 python2 并设置为默认方式》,一定要将python2设置为默认python。目前不支持通过python2安装pip2,可以通过以下方式安装:
wget https://bootstrap.pypa.io/pip/2.7/get-pip.py
python get-pip.py3-2 Modelsim安装
PULPino要求Modelsim的版本在10.2c以上,本人安装的版本为Modelsim SE 2020.4,软件下载及安装可以参考《Ubuntu 22.04 LTS安装Modelsim SE 2020.4》,非常详细。
3-3 riscv-gnu-toolchain安装
务必使用PULP自己的riscv工具链,即pulp-riscv-gnu-toolchain,原因在于存在一些自定义的指令集,官方标准的riscv-gnu-toolchain并不支持,会造成编译错误。prefix后面的安装路径可自由指定。
# Install serveral packages
sudo apt-get install autoconf automake autotools-dev curl libmpc-dev libmpfr-dev libgmp-dev gawk build-essential bison flex texinfo gperf libtool patchutils bc zlib1g-dev
# Get the sources
git clone https://github.com/pulp-platform/pulp-riscv-gnu-toolchain
cd pulp-riscv-gnu-toolchain
git submodule update --init --recursive
# Build cross-compiler
sudo ./configure --prefix=/opt/pulp_riscv --with-arch=rv32imc --with-cmodel=medlow --enable-multilib
sudo make
# Add to PATH
export PATH=$PATH:/opt/pulp_riscv/bin按照上述步骤安装完成后,通过which riscv32-unknown-elf-objcopy检查是否安装成功。
四、Helloworld例程
4-1 下载并更新ip
PULPino复用了PULP平台下的多个ip,运行下面指令:
./update-ips.pyupdate-ips.py脚本会读取ip-lists.txt文件,从github下载并切换到pulpinov1分支。由于adv_dbg_if在最新更新后删掉了pulpinov1分支,所以会出现下列报错:
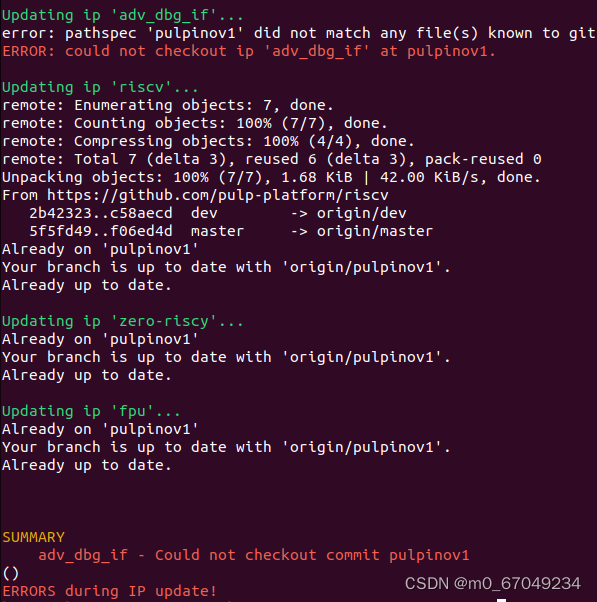
但是没关系,adv_dbg_if已经被下载下来并处于master分支,同样支持后续仿真。
4-2 编译
修改/path/to/pulpino/sw/CMakeLists.txt文件中#54行,最新版本CMake不再支持-m32选项。
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -march=${GCC_MARCH} -Wa,-march=${GCC_MARCH}")任意位置新建build目录,并将/path/to/pulpino/sw目录下的cmake_configure*.gcc.sh文件拷贝到build目录下。
mkdir build
cd build
cp /path/to/pulpino/sw/cmake_configure*.gcc.sh .一共有四个cmake_configure文件,分别代表四种RISC-V核的配置,riscv以及riscvf使用的是RISCY核,其中riscvf增加了浮点运算指令集,zeroriscy使用的是标准zero-riscy核,而microriscy使用的是zero-riscy核的嵌入式架构,只支持16个通用整数寄存器。下面以zeroriscy配置为例,其它几种配置按照下面流程同样可以成功。
修改cmake_configure.zeroriscy.gcc.sh文件,修改#13行中的TARGET_C_FLAGS参数。
TARGET_C_FLAGS="-O3 -march=rv32g -g"运行cmake_configure.zeroriscy.gcc.sh,
./cmake_configure.zeroriscy.gcc.sh会出现riscv.ld文件不存在报错:
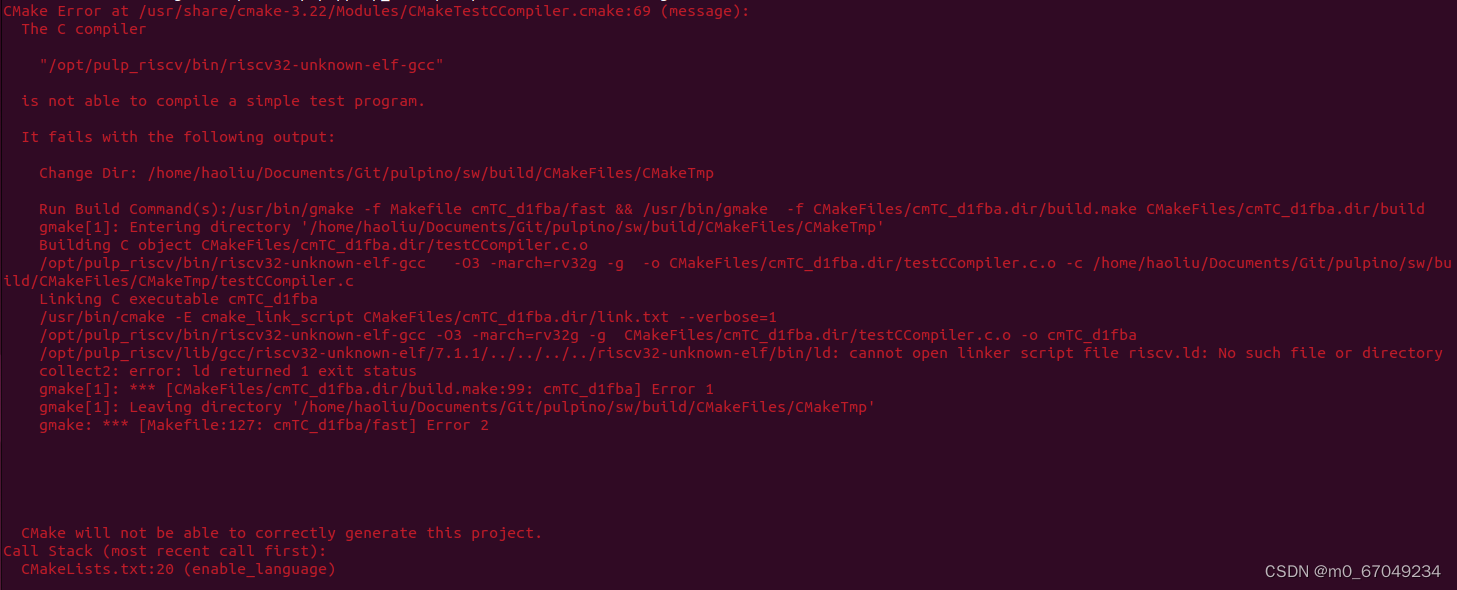
新建一个脚本fix_riscv_ld.sh,内容如下:
#!/usr/bin/bash
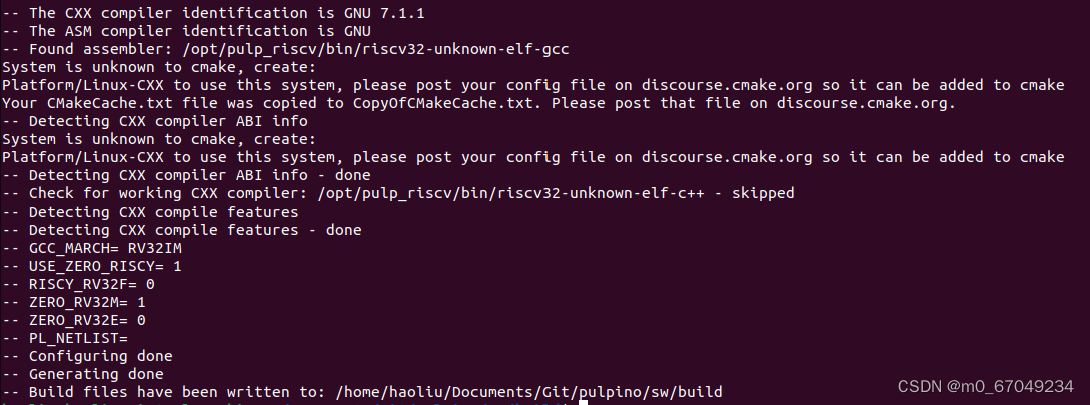
riscv32-unknown-elf-ld --verbose | head -n -1 | tail -n +7 | sed '168 a \ \ _fbss = .;' | sed '169 a \ \ . = .;' > /home/haoliu/Documents/Git/pulpino/sw/build/CMakeFiles/CMakeTmp/riscv.ld若运行 cmake_configure.zeroriscy.gcc.sh脚本出现riscv.ld文件不存在报错就运行fix_riscv_ld.sh,循环两三次后就可以成功了,打印信息如下:
最后进行编译
make vcompile4-3 仿真运行
调用Modelsim console模式运行:
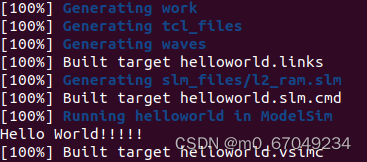
make helloworld.vsimc务必确保Modelsim能启动,可使用vsim命令打开Modelsim检查是否能正常启动。仿真运行后会打印出以下信息:
调用Modelsim GUI模式运行:
make helloworld.vsim打开GUI后在Transcript会发现一些关于DPI的warning:
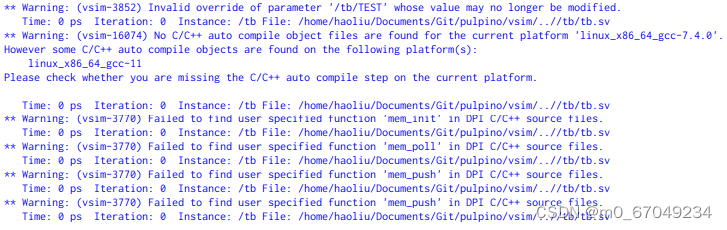
虽然不影响运行结果,但最好还是消除掉, 修改/path/to/pulpino/vsim/tcl_files/config/vsim.tcl文件#16行:
$VSIM_FLAGS -dpicpppath /usr/bin/gcc"在Modelsim命令行中输入:
add wave /*
run -all即可得到以下结果:
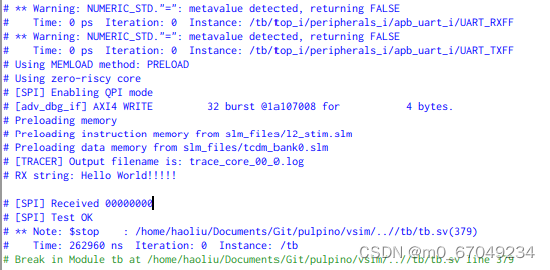
至此,helloworld仿真完成。在/path/to/build/apps目录下可以发现除了helloworld外,还有其他testcase可以运行,有兴趣的读者可以自行运行查看波形。

















 8029
8029

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









