







51单片机实现蓝牙点动小车
其实只要把串口通信搞通了,不管是蓝牙控制还是WiFi控制以及4G控制都是一样的原理
分文件编程
代码如下:
main.c:
#include “reg52.h”
#include “motor.h”
#include “Uart.h”
void main()
{
UartInit();
while(1){
Stop();
}
}
motor.c:
#include “reg52.h”
sbit RightCon1A = P3^2;
sbit RightCon1B = P3^3;
sbit LeftCon1A = P3^4;
sbit LeftCon1B = P3^5;
void goForward()
{
RightCon1A = 0;
RightCon1B = 1;
LeftCon1A = 0;
LeftCon1B = 1;
}
void goBack()
{
RightCon1A = 1;
RightCon1B = 0;
LeftCon1A = 1;
LeftCon1B = 0;
}
void goRight()
{
RightCon1A = 0;
RightCon1B = 0;
LeftCon1A = 0;
LeftCon1B = 1;
}
void goLeft()
{
RightCon1A = 0;
RightCon1B = 1;
LeftCon1A = 0;
LeftCon1B = 0;
}
void Stop()
{
RightCon1A = 0;
RightCon1B = 0;
LeftCon1A = 0;
LeftCon1B = 0;
}
delay.c:
#include “intrins.h”
void Delay10ms() //@11.0592MHz
{
unsigned char i, j;
i = 18;
j = 235;
do
{
while (--j);
} while (--i);
}
void Delay1000ms() //@11.0592MHz
{
unsigned char i, j, k;
_nop_();
i = 8;
j = 1;
k = 243;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
Uart.c:
#include “reg52.h”
#include “motor.h”
#include “string.h”
#include “delay.h”
sfr AUXR = 0x8E;
char buffer[12];
void UartInit(void) //9600bps@11.0592MHz
{
AUXR = 0x01;//降低电磁干扰
SCON = 0x50; //配置串口工作方式1,REN使能接收
TMOD &= 0x0F;
TMOD |= 0x20;//定时器1工作方式位8位自动重装
TH1 = 0xFD;
TL1 = 0xFD;//9600波特率的初值
TR1 = 1;//启动定时器1
EA = 1;//开启中断总开关
ES = 1;//开启串口中断开关
}
//M1:前 M2:后 M3:左 M4:右
void UART_Handler() interrupt 4
{
static int i=0;
char tmp;
//怎么知道收到数据,查询RI的值,如果RI是1(收到数据后由硬件置1)
if(RI){//中断处理函数中对于接收中断的响应,当RI等于1时才执行下面的代码
RI = 0;//复位接收中断标志
tmp = SBUF;//将指令写入单片机
if(tmp == 'M'){
i=0;
}
buffer[i++] = tmp;
if(buffer[0] == 'M'){
switch(buffer[1]){
case '1':
goForward();
Delay10ms();
break;
case '2':
goBack();
Delay10ms();
break;
case '3':
goLeft();
Delay10ms();
break;
case '4':
goRight();
Delay10ms();
break;
default:
Stop();
break;
}
}
}
if(i == 12){
memset(buffer,'\0',12);
i=0;
}
}
motor.h:
void goForward();
void goBack();
void goRight();
void goLeft();
void Stop();
delay.h:
void Delay1000ms();
void Delay10ms();
Uart.h:
void UartInit();
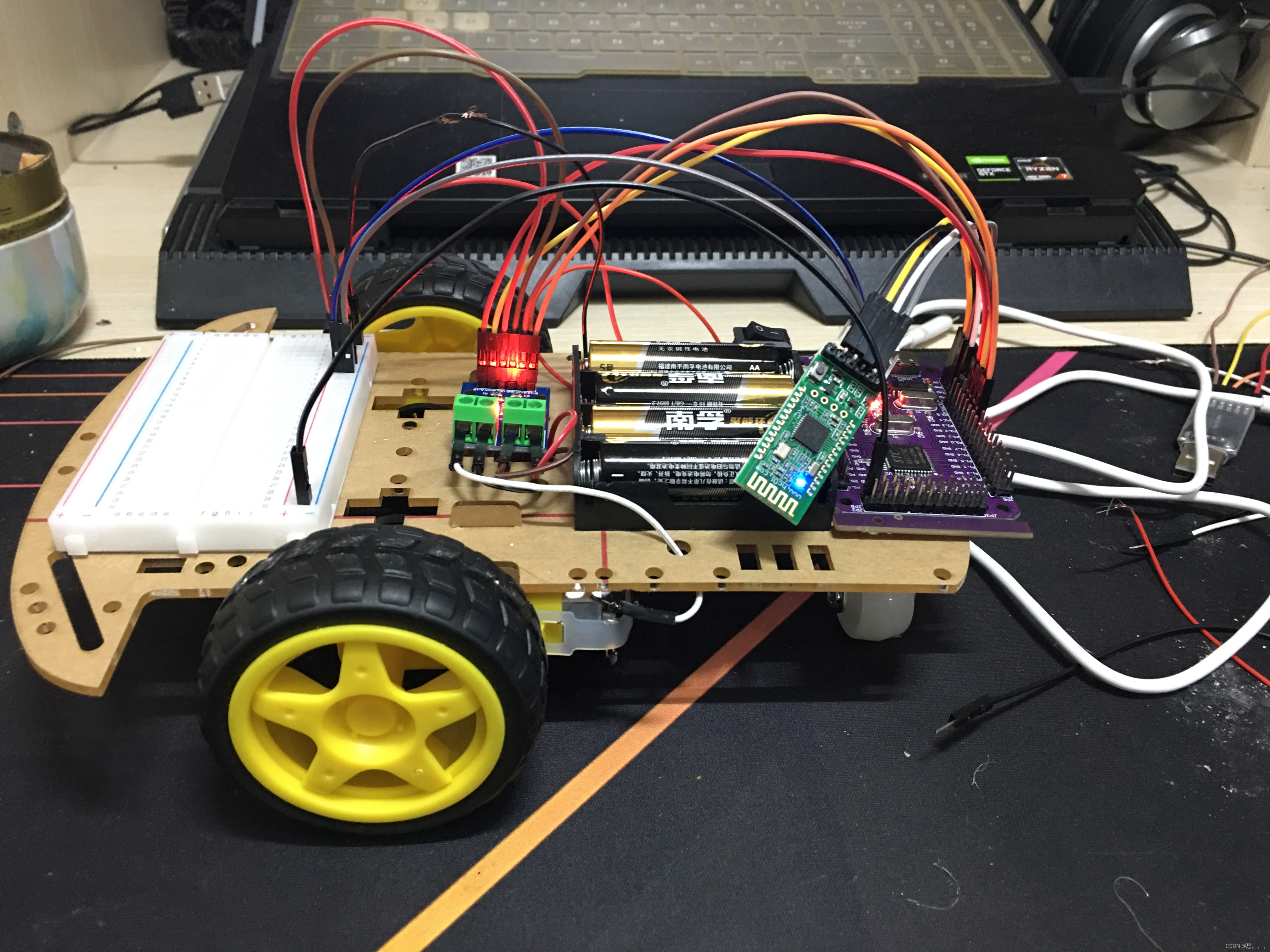
成果图:















 5409
5409











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









