







STM32F103C8T6基于HAL库移植uC/OS-III系统及任务分配
一.uC/OS-III 多任务系统简介
-
uC/OS 是 Micrium 公司出品的 RTOS 类实时操作系统,uC/OS 目前有两个版本:uC/OS-II 和 uC/OS-III。
uC/OS-III 是一个可裁剪、可剥夺型的多任务内核,而且没有任务数限制。
uC/OS-III 提供了实时操作系统所需的所有功能,包括资源管理、同步、任务通信等。
uC/OS-III 是用 C 和汇编来写的,其中绝大部分都是用 C 语言编写的,只有极少数的与处理器密切相关的部分代码才是用汇编写的, uC/OS-III 结构简洁,可读性很强! -
uC/OS-III 任务管理
① uC/OS-III 创建任务。
创建任务就是将任务控制块、任务堆栈、任务代码等联系在一起,并且初始化任务控制块的相应字段。在 uC/OS-III 中通过函数 OSTaskCreate() 来创建任务。
② uC/OS-III 任务删除。
OSTaskDel() 函数用来删除任务,当一个任务不需要运行的话,我们就可以将其删除掉,删除任务不是说删除任务代码,而是 uC/OS-III 不再管理这个任务。
③ uC/OS-III 任务挂起。
有时候有些任务因为某些原因需要暂停运行,但是以后还要运行,因此就不能删除掉任务,这里可以使用 OSTaskSuspend() 函数挂起这个任务,以后再恢复运行。
④ uC/OS-III 任务恢复。
OSTaskResume() 函数用来恢复被 OSTaskSuspend() 函数挂起的任务, OSTaskResume() 函数是唯一能恢复被挂起任务的函数。
⑤ uC/OS-III 时钟片轮转调度。
uC/OS-III 是支持多个任务拥有同一个优先级的,这些任务采用时间片轮转调度方法进行任务调度。在 os_cfg.h 文件中有个宏 OS_CFG_SCHED_ROUND_ROBIN_EN,使用时间片轮转调度就需要将 OS_CFG_SCHED_ROUND_ROBIN_EN 定义为 1 ,这样 uC/OS-III 中有关时间片轮转调度的代码才会被编译,否则不能使用时间片轮转调度。
二.学习要求
学习嵌入式实时操作系统(RTOS),以uc/OS-III为例,将其移植到stm32F103上,构建至少3个任务(task):其中两个task分别以1s和3s周期对LED等进行点亮-熄灭的控制;另外一个task以2s周期通过串口发送“hello uc/OS! 欢迎来到RTOS多任务环境!”。记录详细的移植过程。
三. 准备 uC/OS-III 源码
进入 Micrium 公司官网下载中心:http://micrium.com/downloadcenter/
选择ST系列,点击 View all STMicroelectronics,点击 STMicroelectronics STM32F107 之后按照提示注册下载即可。
四.创建STM32CubeMX工程
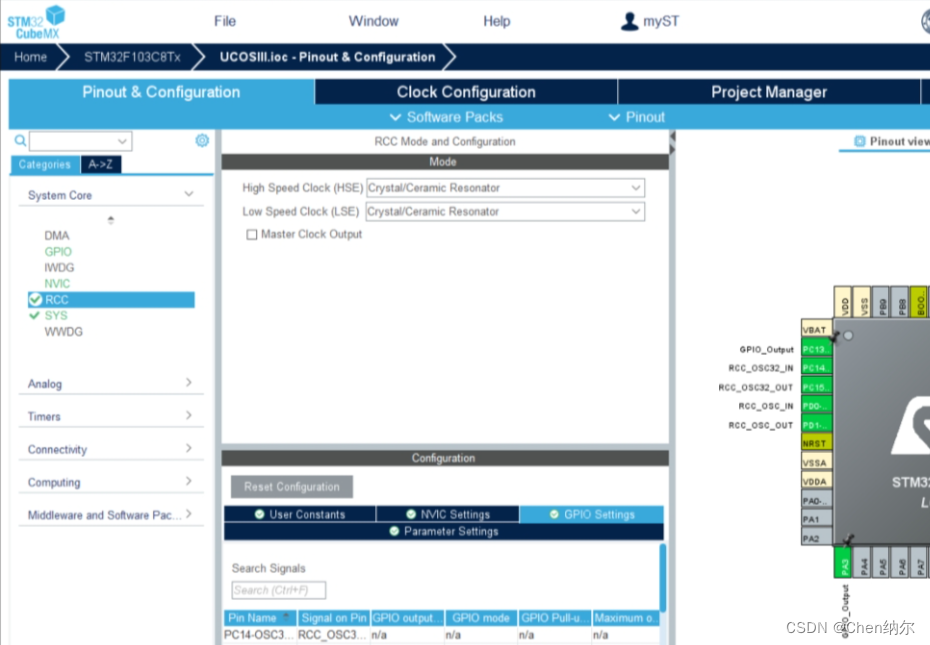
- 打开STM32CubeMX软件,选择对应的STM32F103C8T6芯片,进入以下界面
- 配置RCC
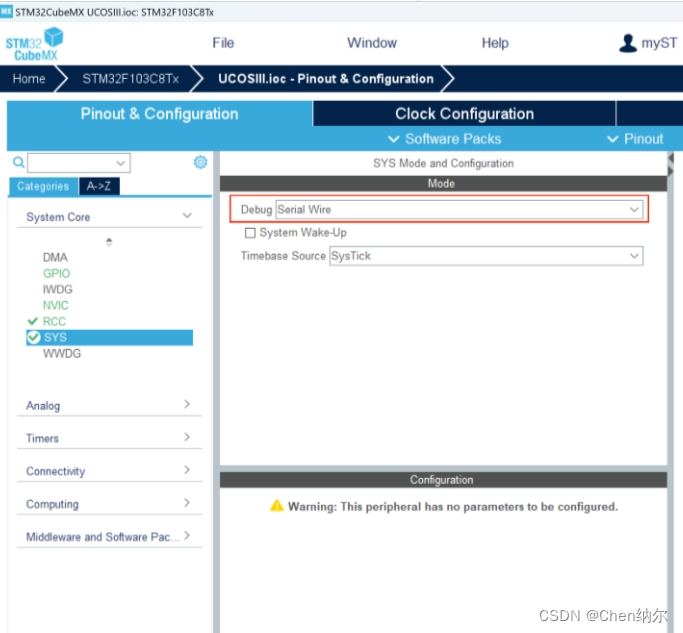
- 配置SYS
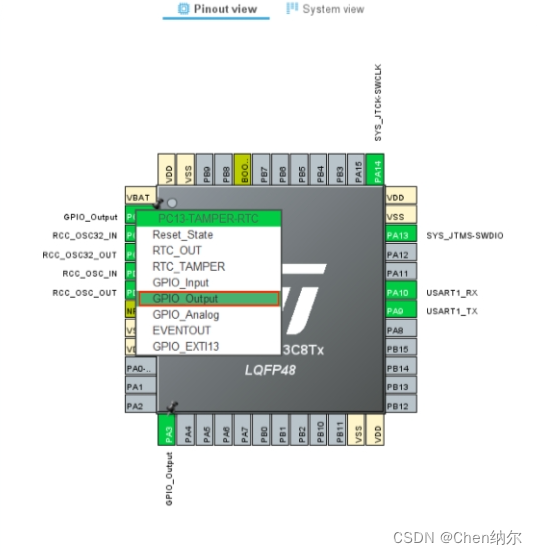
- 配置PA3和PC13口为推挽输出模式,用于点亮LED灯
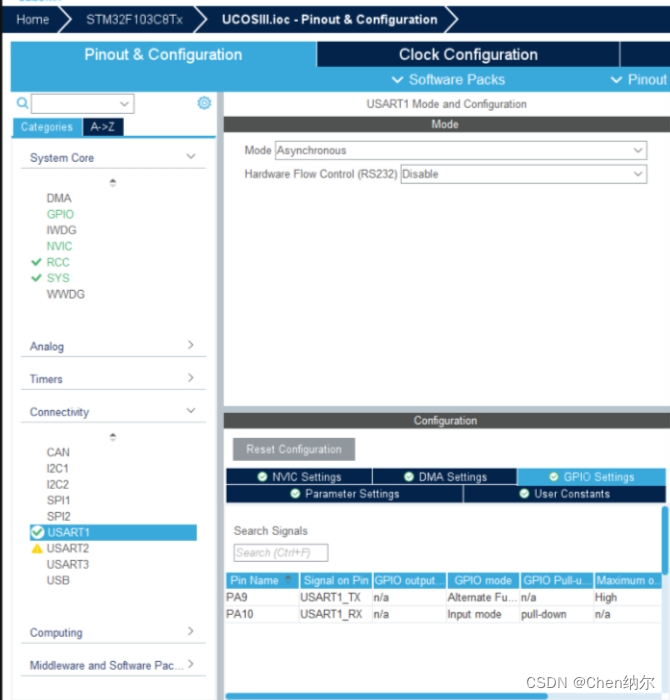
- 配置串口 USART1
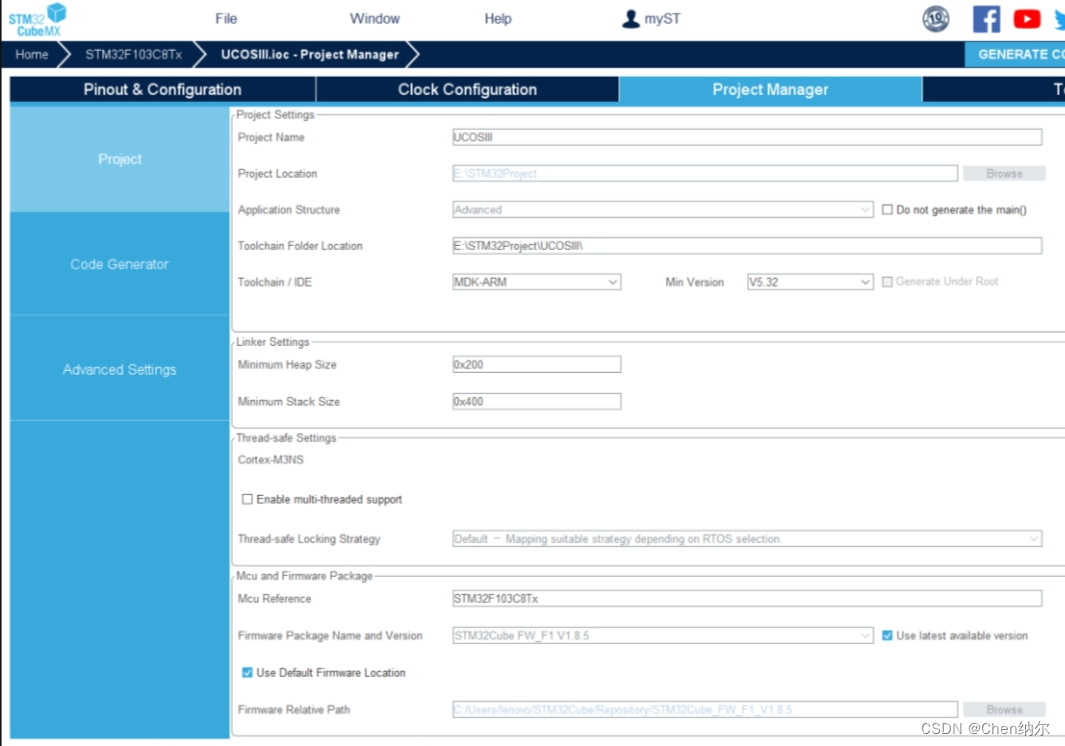
- 设置路径及项目名称
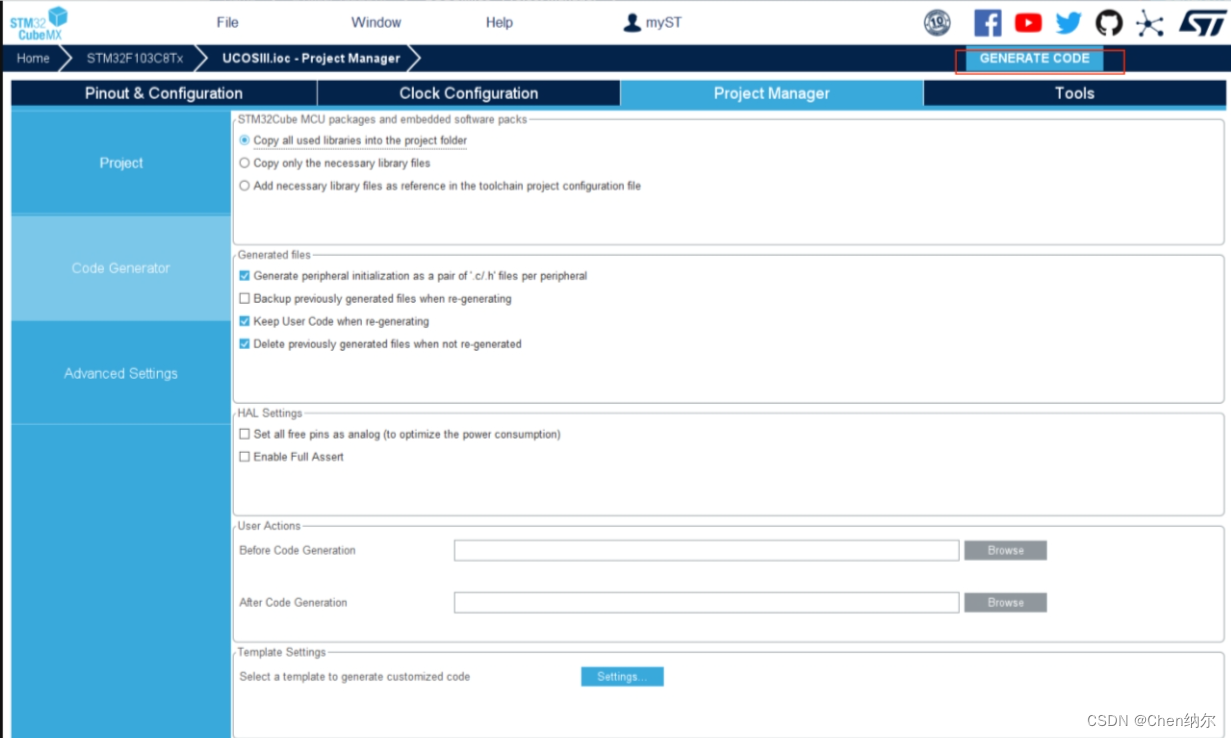
- 创建代码并导出keil文件
五.为 HAL 库工程移植文件
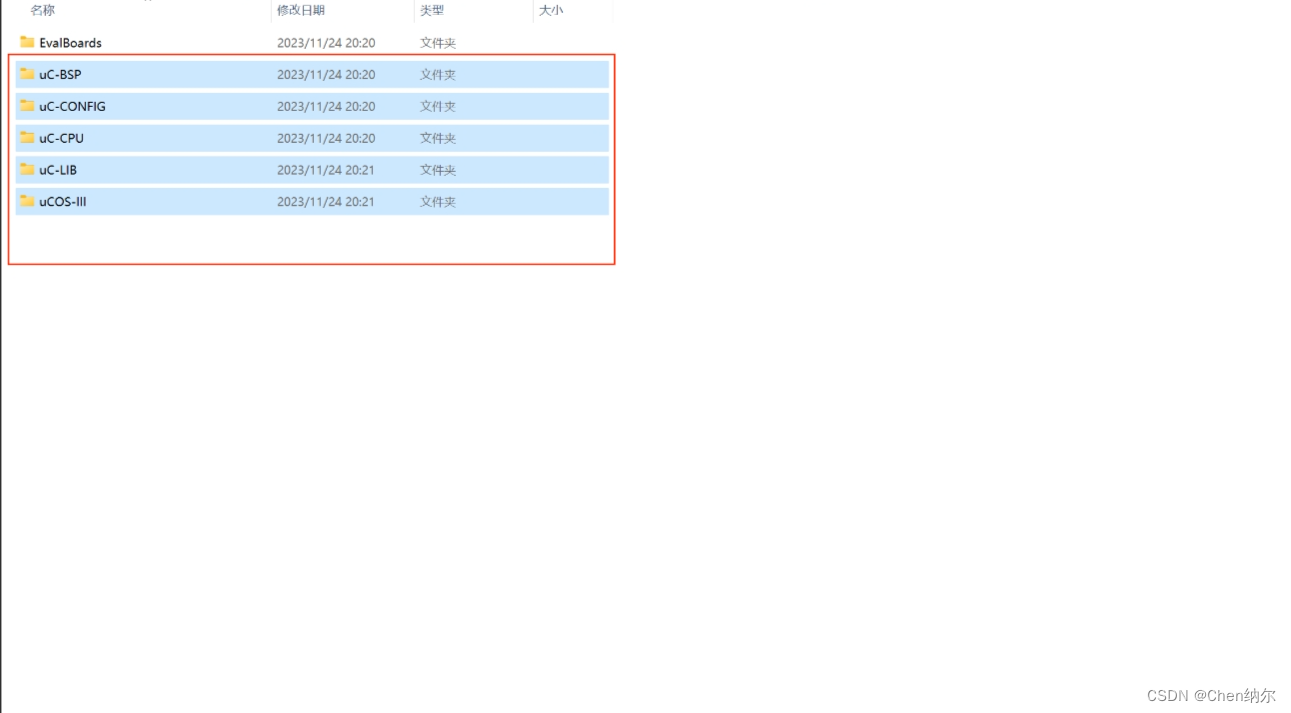
- 打开下载好的文件夹
找到以下五个文件,将其复制到刚刚创建好的Keil工程中的MDK-ARM文件夹下
1.将 uCOS 相关文件添加到项目
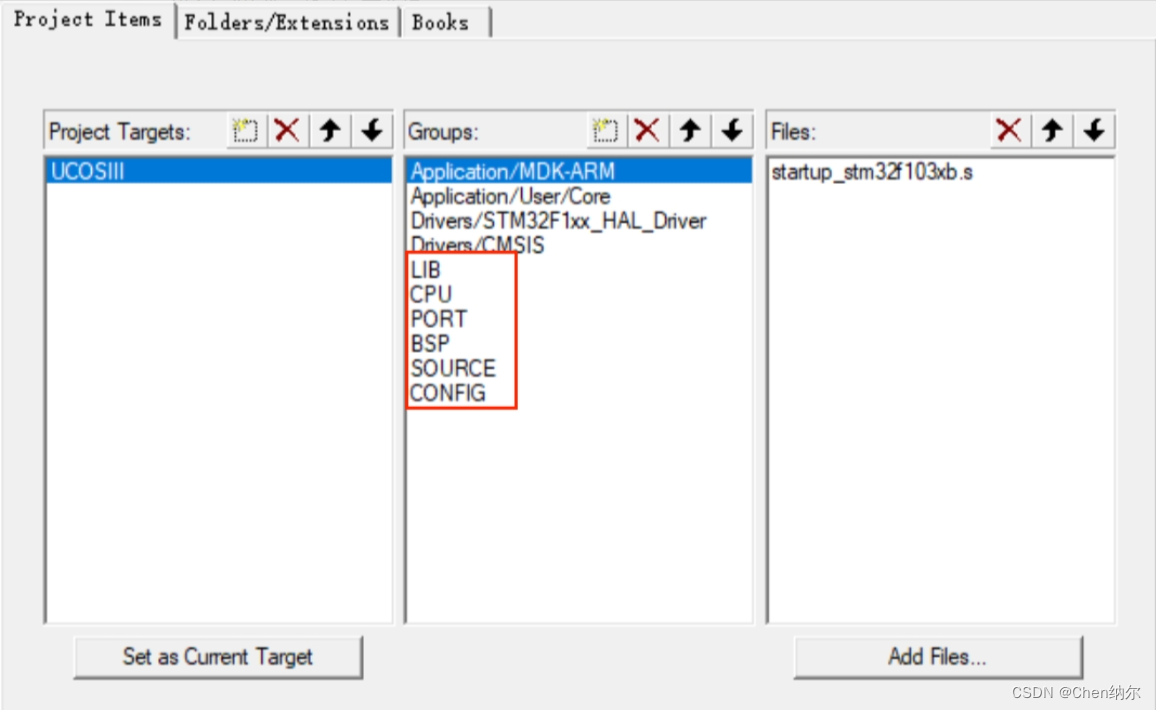
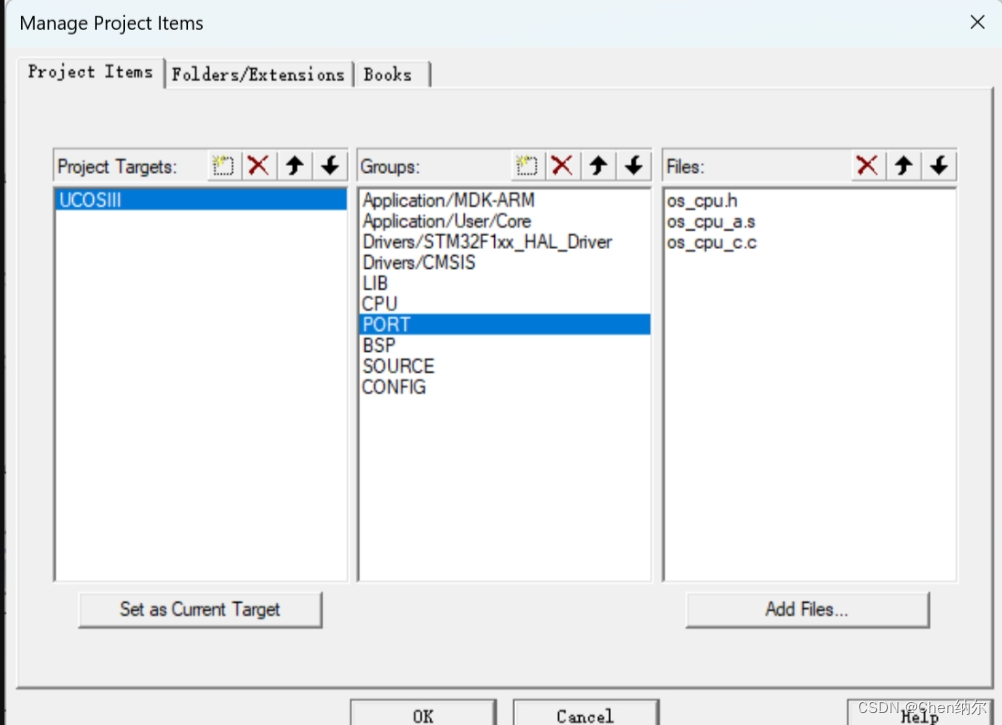
打开 keil5 工程,点击 Manage Project Items 添加项目
新建如下 6 个项目
2.为上面新建的项目分别添加文件
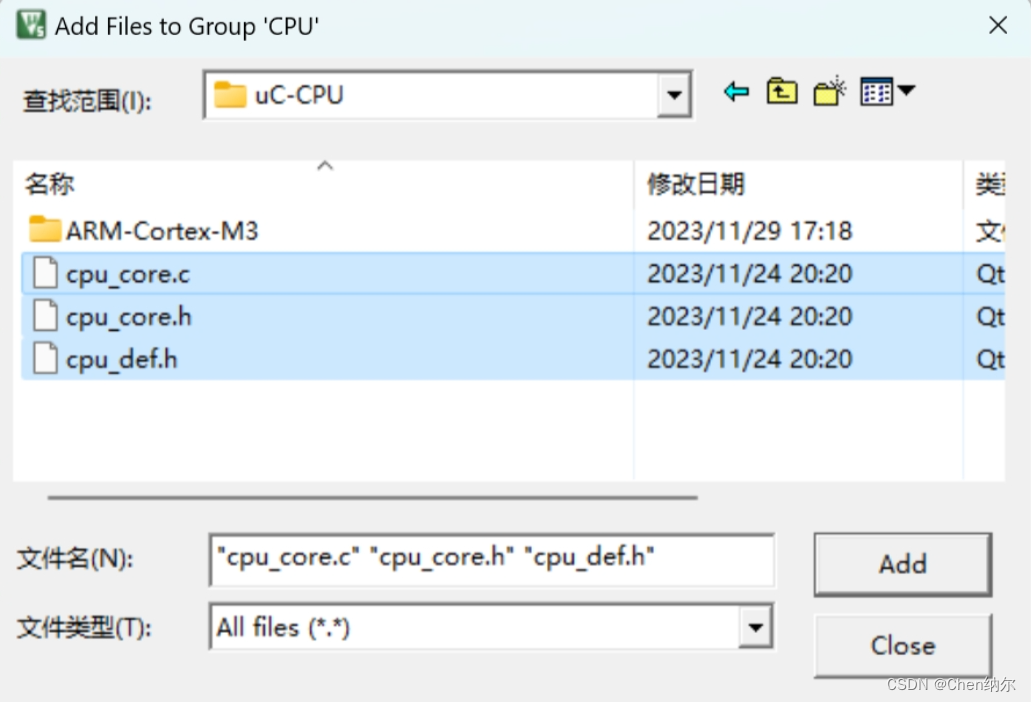
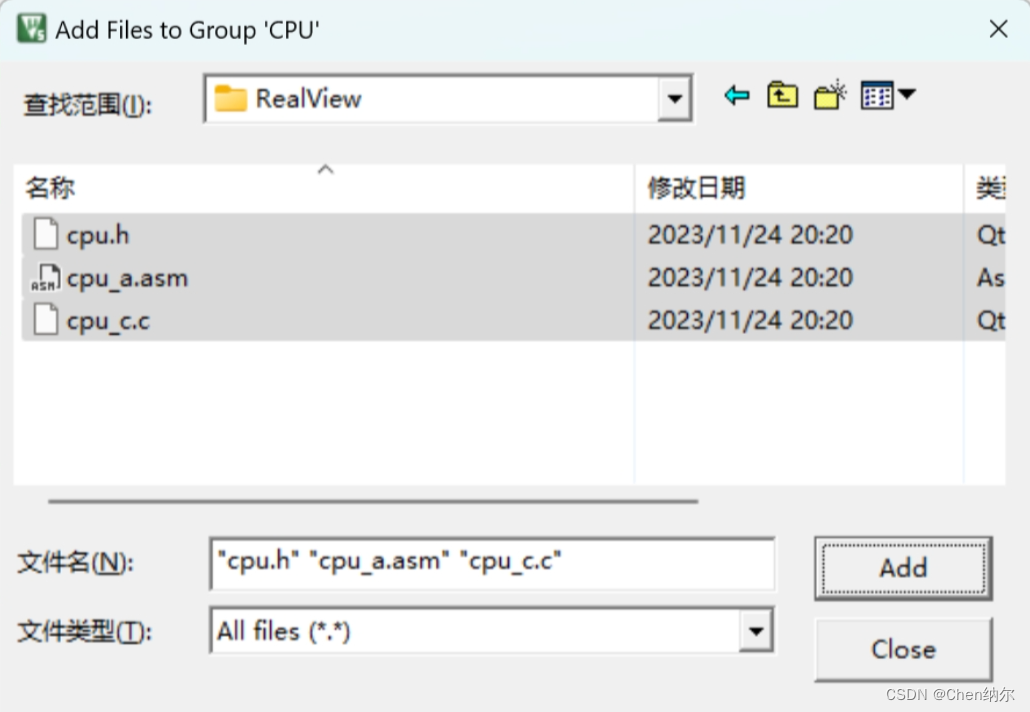
① 点击 CPU –> Add Files…,按照如下方式
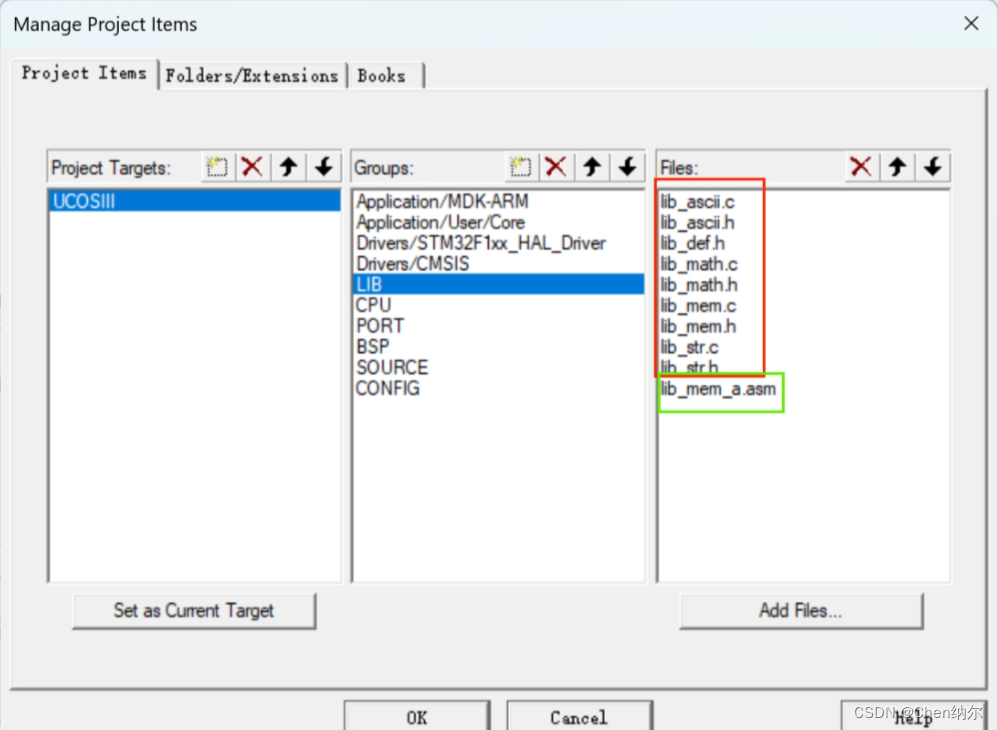
② 点击 LIB –> Add Files…
③ port
\uCOS-III\Ports\ARM-Cortex-M3\Generic\RealView将此路径下的文件添加到port中
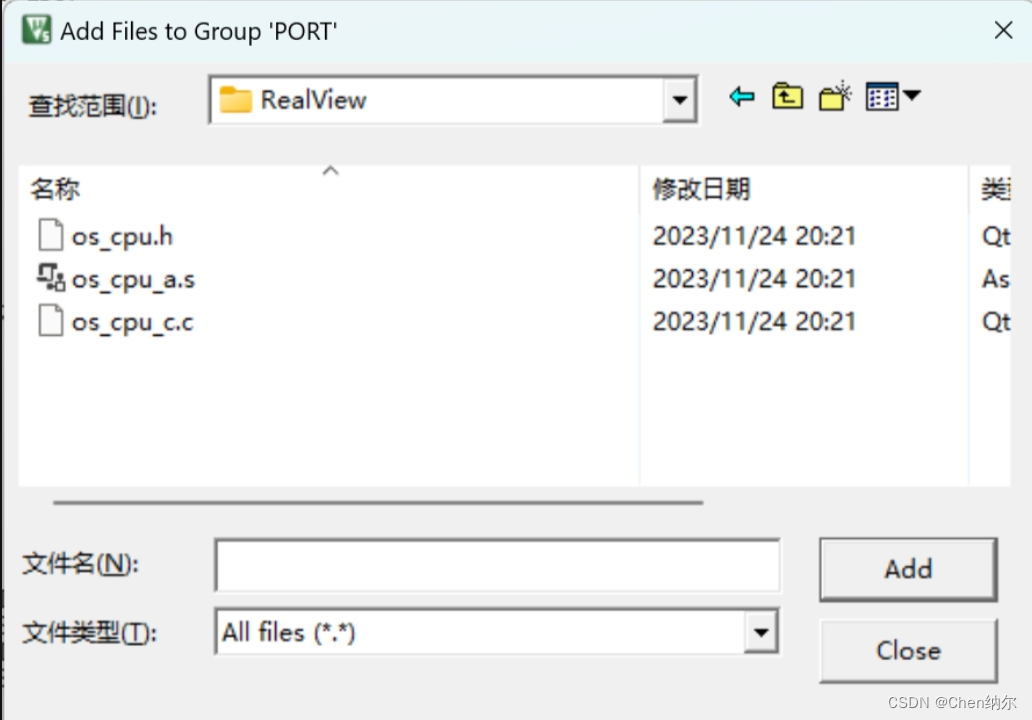
添加后的port组
④ bsp
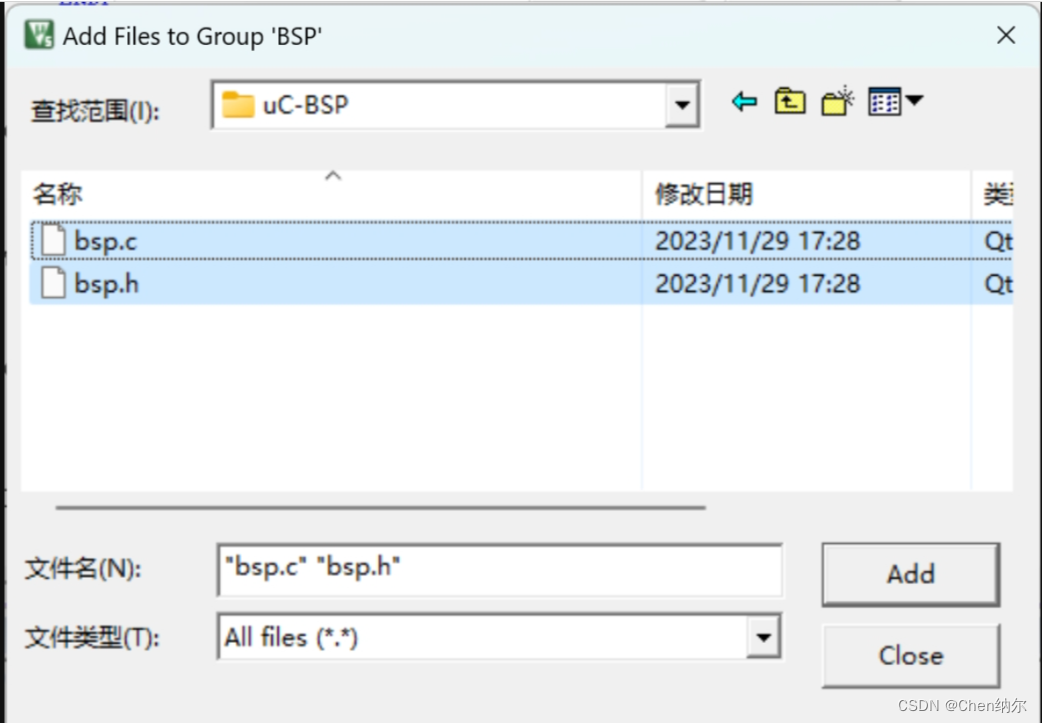 打开uC-BSP文件,选中全部添加
打开uC-BSP文件,选中全部添加
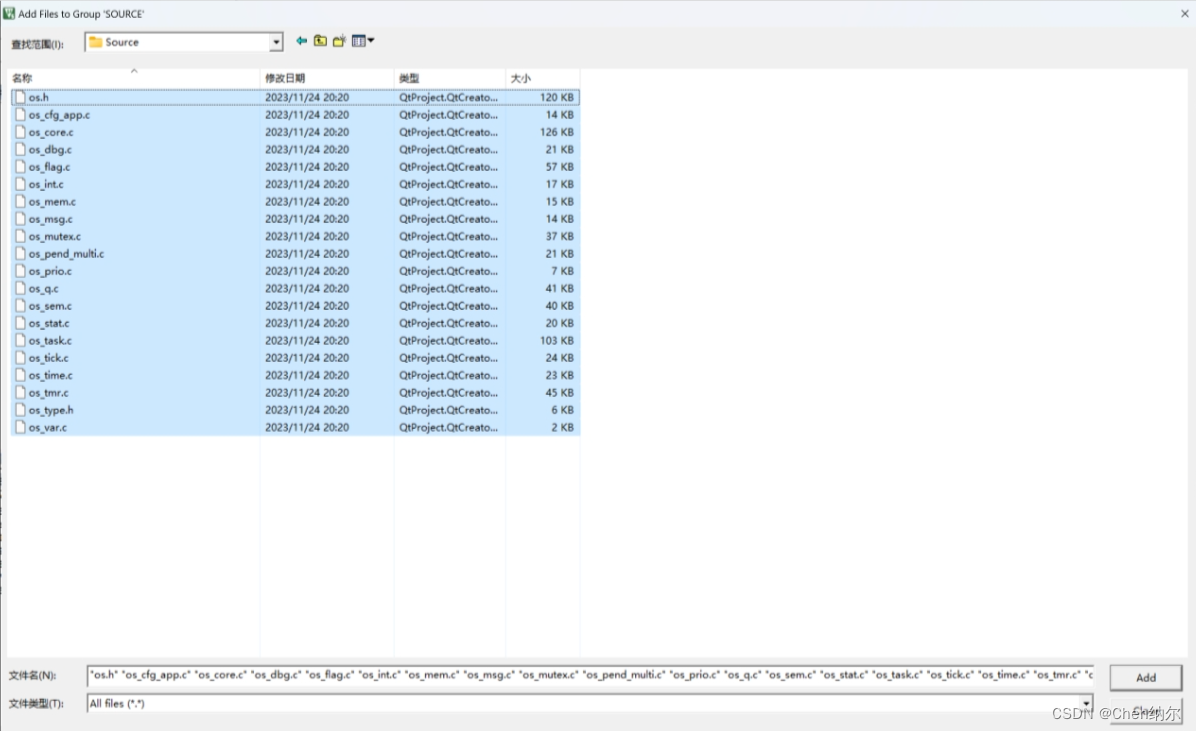
⑤source
MDK-ARM\uCOS-III\Source路径下选中以下全部 .c .h 文件,Add添加
⑥config
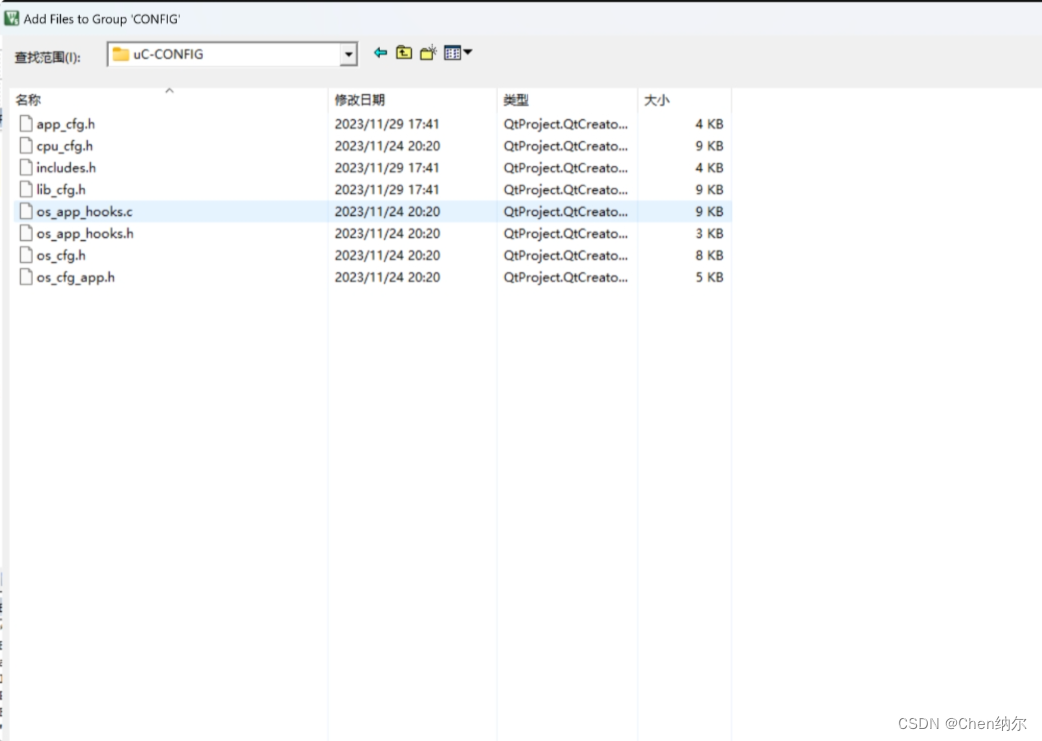
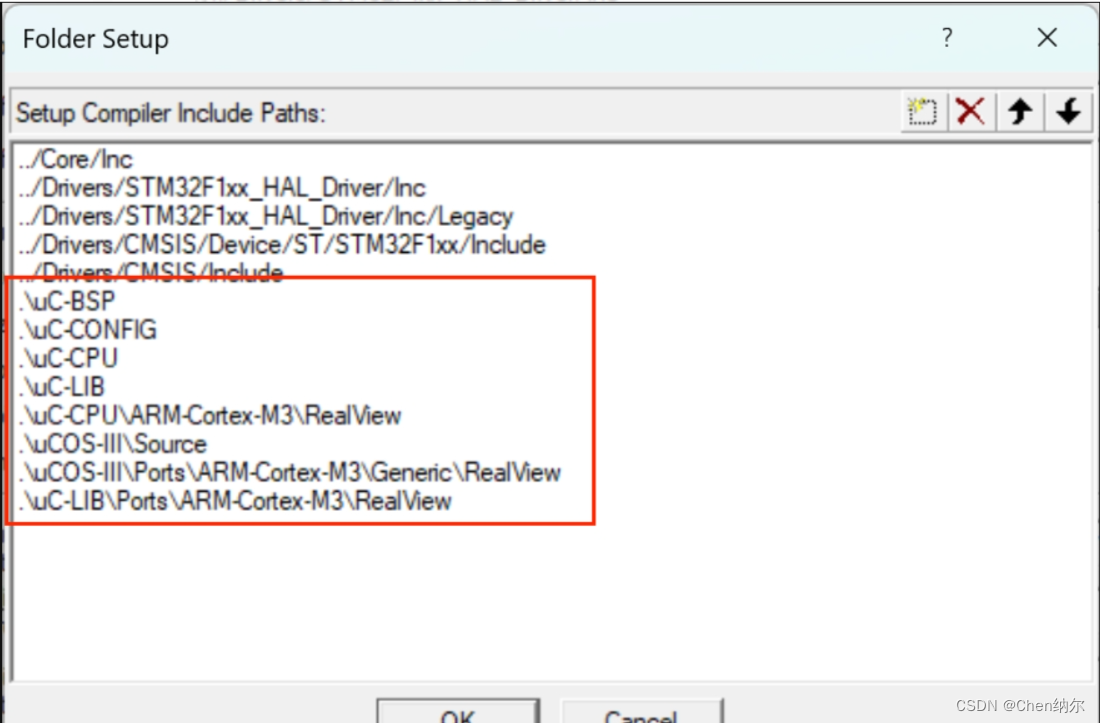
按照如下所示步骤,依次导入文件路径
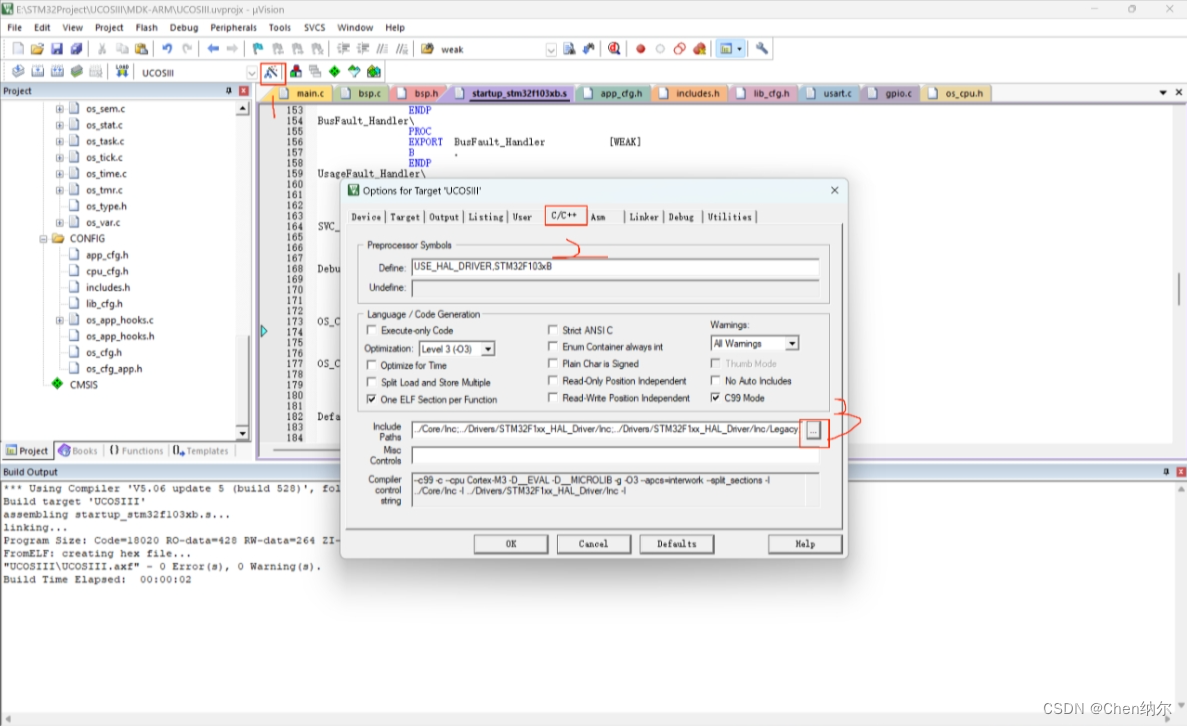
添加如下路径
六.添加修改代码
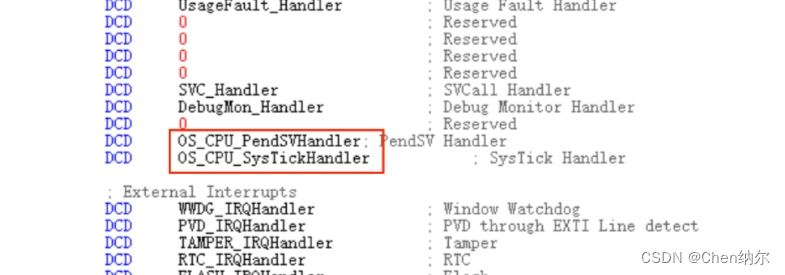
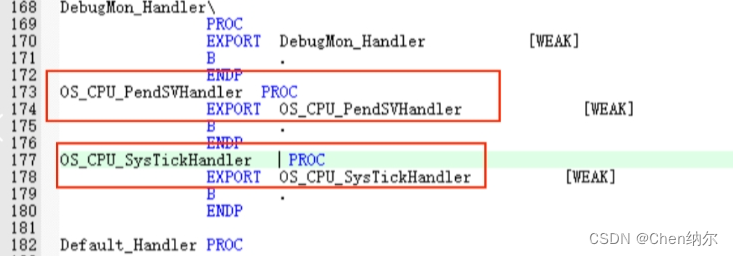
1.修改启动文件 startup_stm32f103xb.s

在以下位置处将PendSV_Handler改为OS_CPU_PendSVHandler,
SysTick_Handler改为OS_CPU_SysTickHandler(两处)
2.修改app_cfg.h文件
在CONFIG组中找到我们要修改的app_cfg.h文件
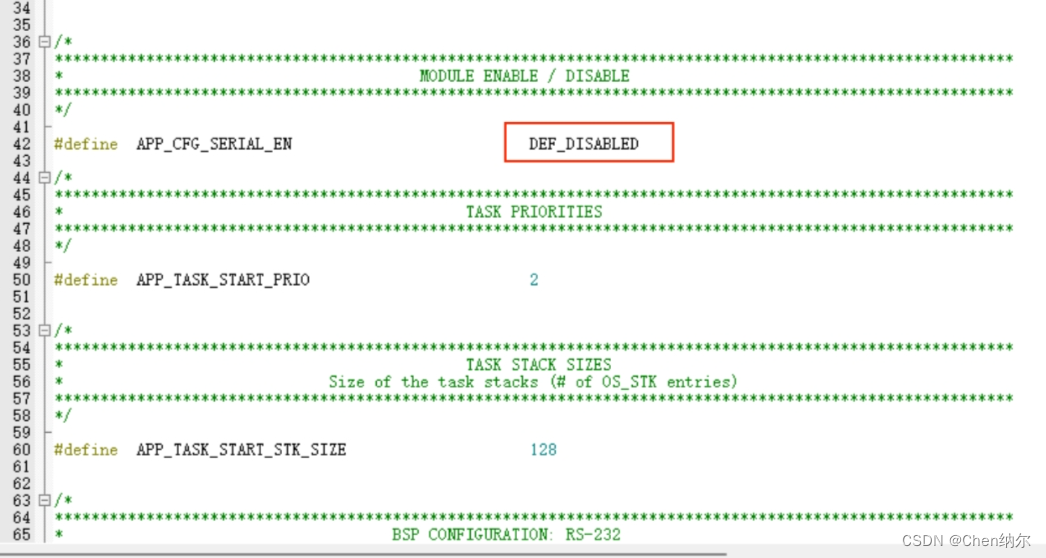
① 将42行的#define APP_CFG_SERIAL_EN DEF_ENABLED 改为 #define APP_CFG_SERIAL_EN DEF_DISABLED;
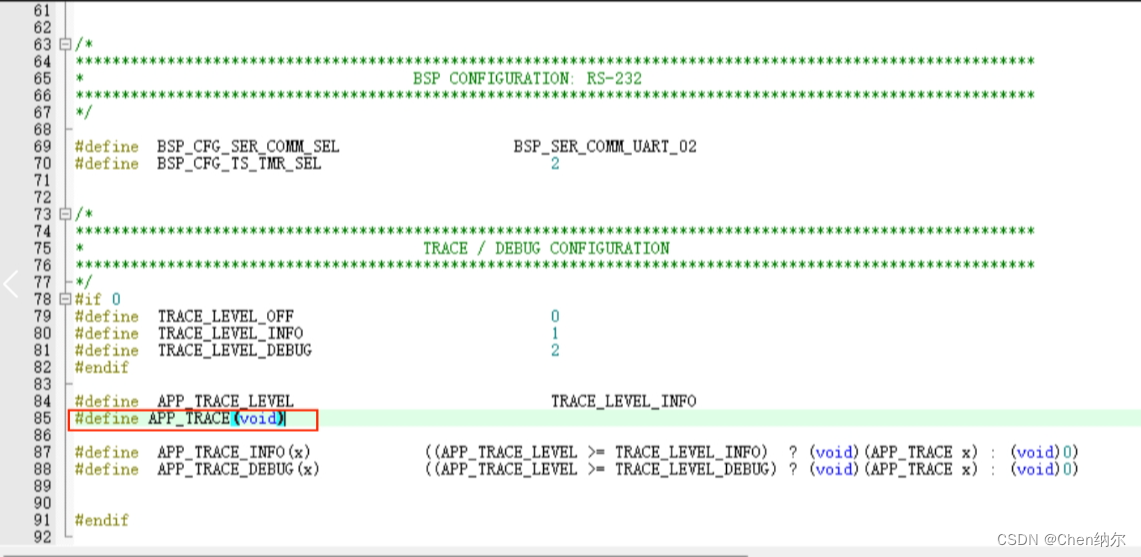
② 将85行的#define APP_TRACE BSP_Ser_Printf 改为 #define APP_TRACE (void)。
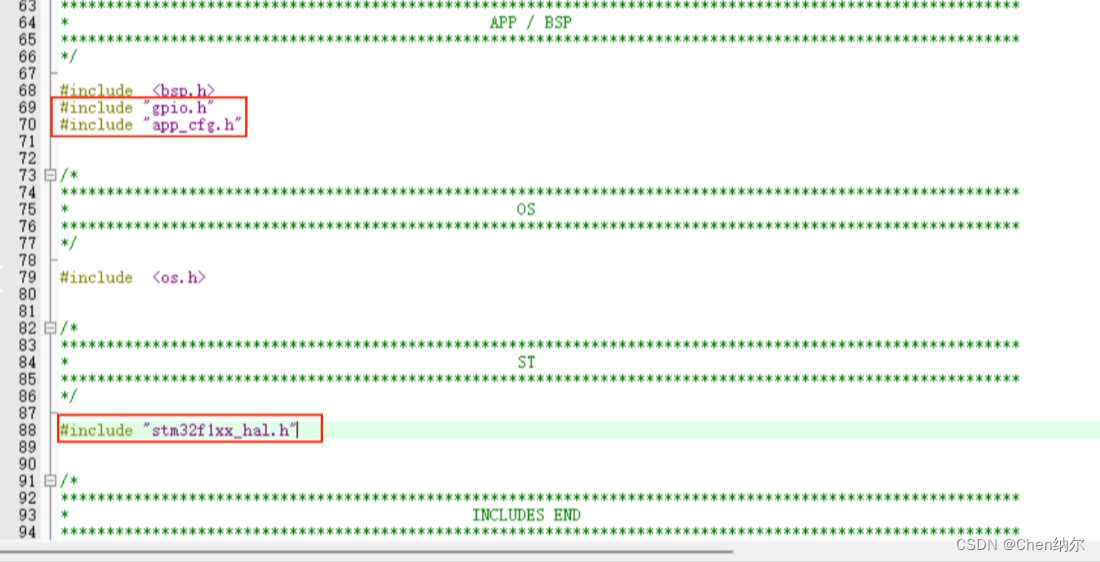
3.修改文件 includes.h
在CONFIG组中,选择includes文件
① 在 #include <bsp.h> 后面添加:#include “gpio.h” #include “app_cfg.h”;
② 将 #include <stm32f10x_lib.h> 改为 #include “stm32f1xx_hal.h”。
4.为 bsp.c 和 bsp.h 添加代码
在BSP组中找到bsp.c与bsp.h
添加以下代码
bsp.h
#ifndef __BSP_H__
#define __BSP_H__
#include "stm32f1xx_hal.h"
void BSP_Init(void);
#endif
bsp.c
// bsp.c
#include "includes.h"
#define DWT_CR *(CPU_REG32 *)0xE0001000
#define DWT_CYCCNT *(CPU_REG32 *)0xE0001004
#define DEM_CR *(CPU_REG32 *)0xE000EDFC
#define DBGMCU_CR *(CPU_REG32 *)0xE0042004
#define DEM_CR_TRCENA (1 << 24)
#define DWT_CR_CYCCNTENA (1 << 0)
CPU_INT32U BSP_CPU_ClkFreq (void)
{
return HAL_RCC_GetHCLKFreq();
}
void BSP_Tick_Init(void)
{
CPU_INT32U cpu_clk_freq;
CPU_INT32U cnts;
cpu_clk_freq = BSP_CPU_ClkFreq();
#if(OS_VERSION>=3000u)
cnts = cpu_clk_freq/(CPU_INT32U)OSCfg_TickRate_Hz;
#else
cnts = cpu_clk_freq/(CPU_INT32U)OS_TICKS_PER_SEC;
#endif
OS_CPU_SysTickInit(cnts);
}
void BSP_Init(void)
{
BSP_Tick_Init();
MX_GPIO_Init();
}
#if (CPU_CFG_TS_TMR_EN == DEF_ENABLED)
void CPU_TS_TmrInit (void)
{
CPU_INT32U cpu_clk_freq_hz;
DEM_CR |= (CPU_INT32U)DEM_CR_TRCENA; /* Enable Cortex-M3's DWT CYCCNT reg. */
DWT_CYCCNT = (CPU_INT32U)0u;
DWT_CR |= (CPU_INT32U)DWT_CR_CYCCNTENA;
cpu_clk_freq_hz = 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3255
3255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









