






1.报错:RuntimeError: Attempting to deserialize object on CUDA device 2 but torch.cuda.device_count() is 1
原因:在使用Pytorch加载模型时报错。加载的模型是用两个GPU训练的,而加载模型的电脑只有一个GPU,所以会出错。
解决:model = torch.load(model_path)
改为:model = torch.load(model_path, map_location=‘cuda:0’)
如果是4块到2块:就把map_location改为:map_location={‘cuda:1’: ‘cuda:0’}
2.BN层在迁移训练中的使用:
设置bn为norm_layer=misc_nn_ops.FrozenBatchNorm2d,冻结住bn的参数,这样做的好处有:
FrozenBatchNorm就是"weight" and “bias”, “running_mean”, "running_var”四个值固定住的BN
经典框架中一直使用的是FrozenBatchNorm2d。如Detectron,DETR, mmdetection?见
“weight” and “bias”, “running_mean”, "running_var”四个值是buf,通过register_buffer设置不更新。
为什么要使用FrozenBatchNorm
BN层在CNN网络中大量使用,但是BN依赖于均值和方差,如果batch_size太小,计算一个小batch_size的均值和方差,肯定没有计算大的batch_size的均值和方差稳定和有意义,这个时候,还不如不使用bn层,因此可以将bn层冻结。另外,我们使用的网络,几乎都是在imagenet上pre-trained,完全可以使用在imagenet上学习到的参数。
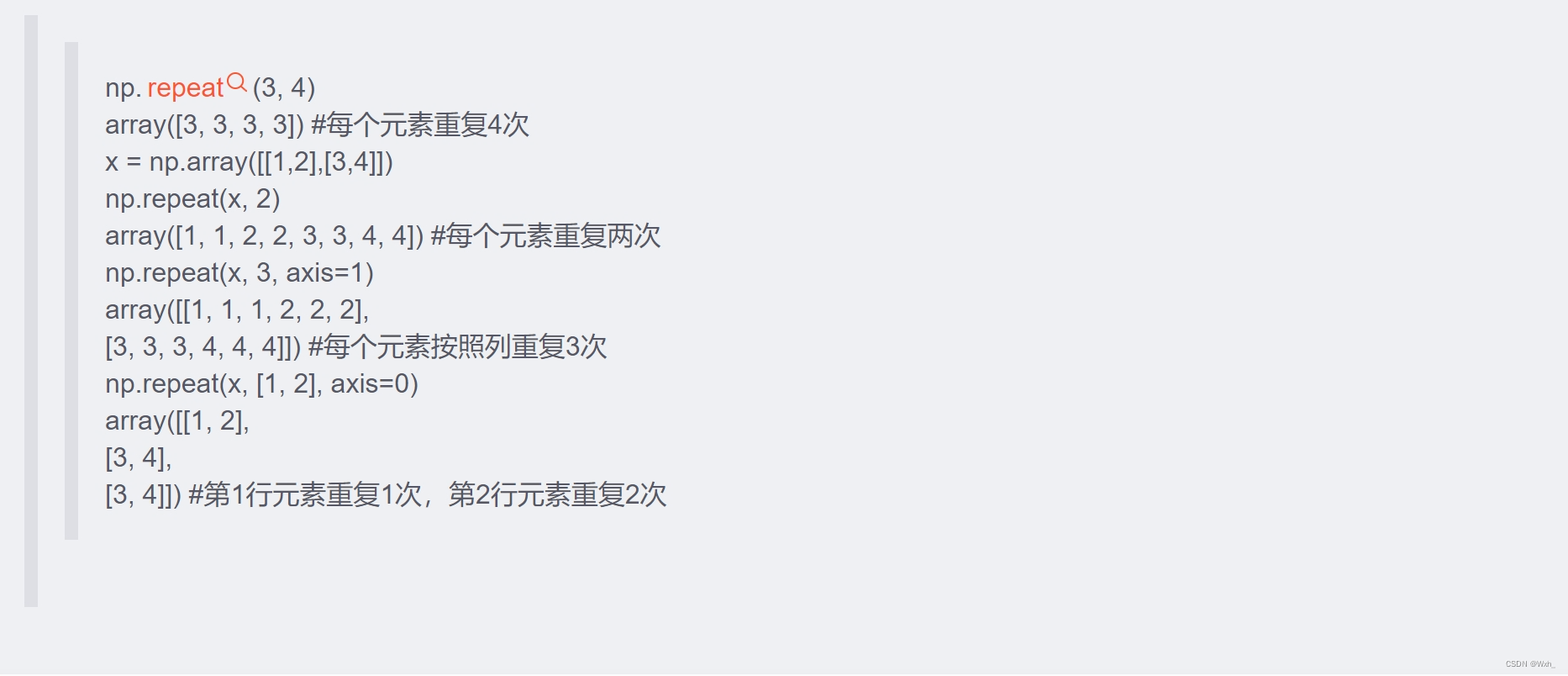
3.numpy.repeat(a, repeats, axis=None)
功能: 将矩阵A按照给定的axis将每个元素重复repeats次数
参数: a:输入矩阵, repeats:每个元素重复的次数, axis:需要重复的维度
返回值: 输出矩阵
4.添加上级目录到python路径:
export PYTHONPATH=$PYTHONPATH:/path
5.从github链接安装包时候网址报错
解决方式:从gitee网站使用镜像网址代替即可解决
6.报错:
OSError: broken data stream when reading image file
解决方式:
from PIL import Image, ImageFile
ImageFile.LOAD_TRUNCATED_IMAGES = True















 7863
7863











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









