







目录
前言
四旋翼飞机在当今时代越来越普及,也得到了更加广泛的应用。本文主要介绍一些四旋翼的基本知识。
一、总体概况

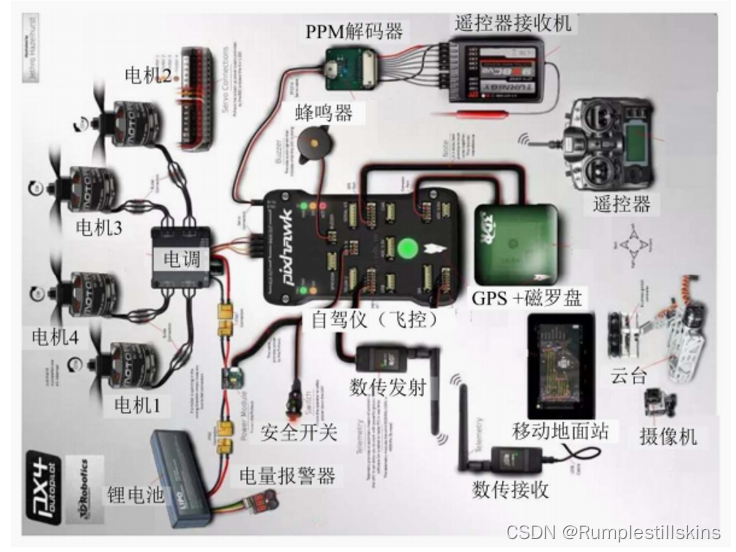
总体框架主要包括:机架,动力系统和指挥控制系统
机架:机身,机臂和起落架
动力系统:电机,电调,电池和螺旋桨
指挥控制系统:遥控器,遥控器接收机,GPS接收机,自驾仪(飞控板),数传电台和地面站
飞机内部的主要布线如下:
二、机身
指标参数:
(1)重量
(2)轴距:外圈电机组成的圆周的直径

F450、F550中的“450”、“550”指的是轴距
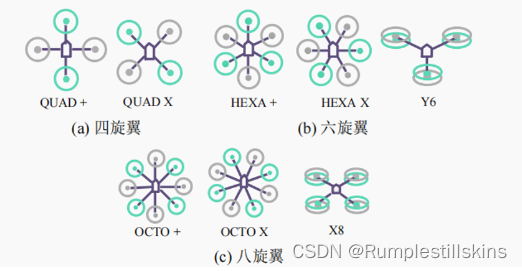
(3)布局:
三、涵道
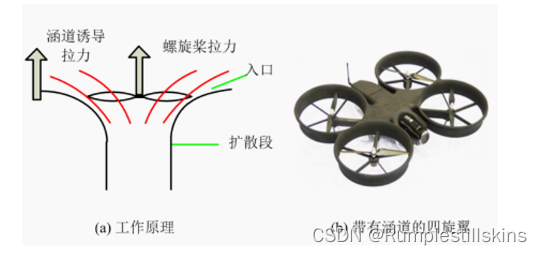
涵道作用:
- 保护桨叶、人
- 提高桨叶拉力效果
- 减少噪音
工作原理:
当螺旋桨工作时,进风口内壁空气速度快静压小,而进风口外壁静压大,因此涵道能产生附加拉力。
四、动力系统
动力系统主要包括:电机,电调,电池和螺旋桨

1、 螺旋桨

- 假设螺旋桨在一种不能流动的介质中旋转,那么螺旋桨每转一圈,就会向前进一个距离,就称为螺距或桨距
- 螺旋桨一般用4个数字表示,其中前面2位是螺旋桨的直径,后面2位是螺旋桨的螺距。比如:1045桨的直径为10英寸,而螺距为4.5英寸
- 二叶桨力效应更大,但直径更大
2、电机

- 无刷直流电机的KV值指的是空载情况下,外加1V电压得到的电机转速值(单位:RPM)
- 大型螺旋桨可以选用KV值较小的电机,而小型螺旋桨可以选用KV值较大的电机
3、电调

- 电调全称电子调速器,英文Electronic Speed Control,简称ESC
- 电调最基本的功能就是电机调速
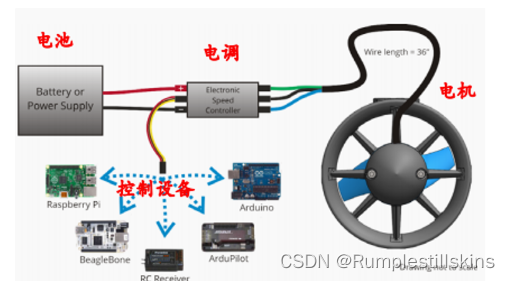
无刷电调最主要的参数是电调的功率,通常以安数A来表示,如10A、20A、30A。不同电机需要配备不同安数的电调,安数不足会导致电调甚至电机烧毁。
4、电池

现在用来做航模动力的电池有很多,常见的有锂聚合物电池(LiPo)和镍氢电池(NiMh),主要源于其优良的性能与价格优势
- 单节电压3.7V,3S1P表示3片锂聚合物电池的串联,电压是11.1V,其中:S是串联,P表示并联。又如2S2P电池表示2片锂聚合物电池的串联,然后两个这样的串联结构并联,总电压是7.4V,容量是单个电池的两倍。
五、遥控器

- 常用的无线电频率是72MHz与2.4GHz,目前采用的最多的是2.4GHz遥k控器。
- 2.4GHz技术属于微波领域,有如下几个优点:频率高、同频几率小、功耗低、体积小、反应迅速、控制精度高
- 调制方式为PCM、PPM、脉冲位置调制三种
六、自动驾驶仪(飞控)

1、组成
注:以固定翼为例
- 全球定位系统(GPS)接收器;
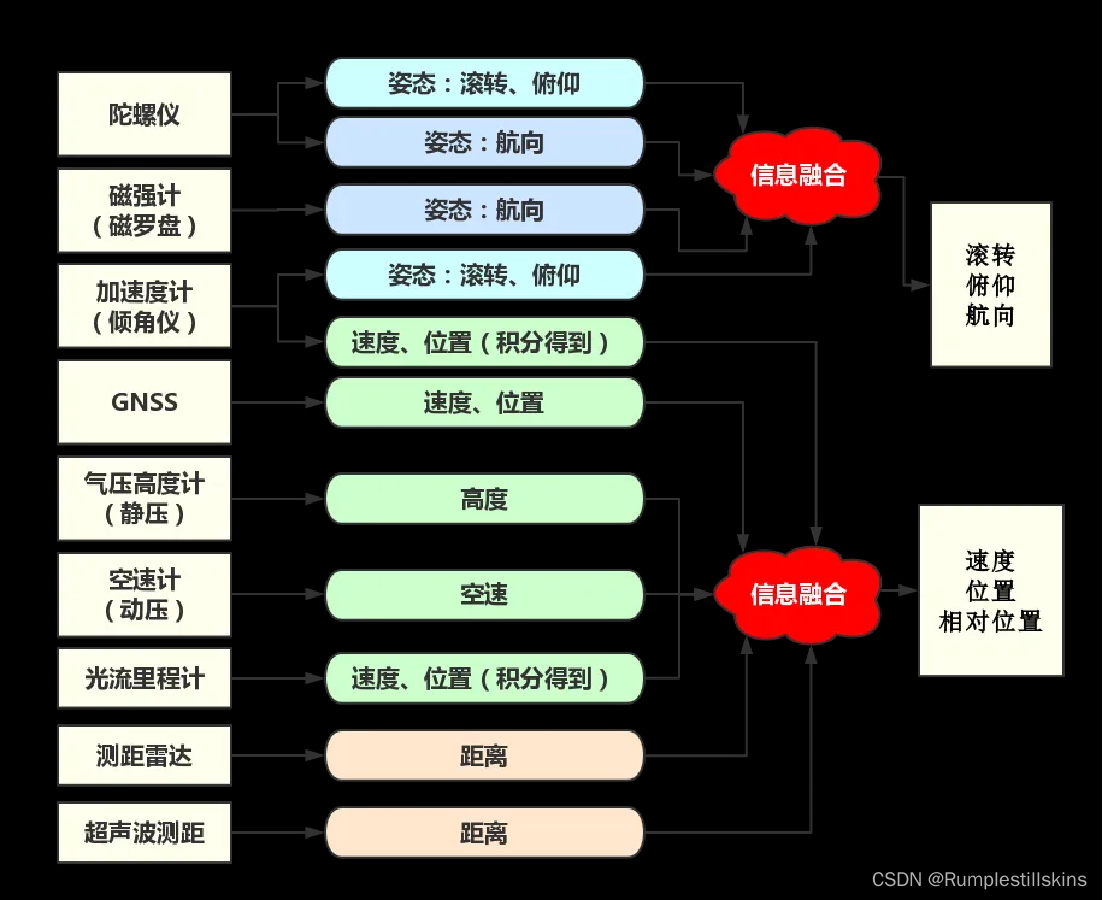
- 惯性测量单元(IMU),包括三轴加速度计、三轴陀螺仪、电子罗盘(或磁力计),目的是得到多旋翼的姿态信息;
- 气压计:测量高度;
- 微型计算机;
- 接口
(1)传感器
(2)接口

2、飞控的连接
- 使用数传连接地面站和飞控时,波特率为57600
- 使用usb线连接地面站和飞控,波特率为115200 波特率表示单位时间内传送的码元符号的个数,它是对符号传输速率的一种度量,它用单位时间内载波调制状态改变的次数来表示,波特率即指一个单位时间内传输符号的个数。
- 在计算机网络通信中,波特率指单片机或计算机在串口通信时的速率,指的是信号被调制以后在单位时间内的变化,即单位时间内载波参数变化的次数模拟线路信号的速率
- 串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方式的扩展接口。串行接口 (Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
3、控制逻辑
- 捷联式惯性导航系统:载体上的加速度计、陀螺仪这两种惯性原件,去分别测出飞行器的角运动信息和线运动信息,与初始姿态、初始航向、初始位置一起交给计算模块,由计算模块推算出飞机的姿态、速度、航向、位置等导航参数的自主式导航方法。
- 卡尔曼滤波算法:当传感器不足以达到所需的导航精度,为了补偿导航系统的不足,常常使用其他导航设备减小误差。卡尔曼滤波算法可以将来自惯性导航系统与其他导航装置的数据(如惯性导航系统计算的位置对照GPS接收机给出的位置信息)加以混合利用,估计和校正未知的惯性导航系统误差。
- PID控制算法:PID控制器是一种线性控制器,它主要根据给定值和实际输出值构成控制偏差,然后利用偏差给出合理的控制量。采用PID控制算法来实现无人机的姿态和轨迹控制。
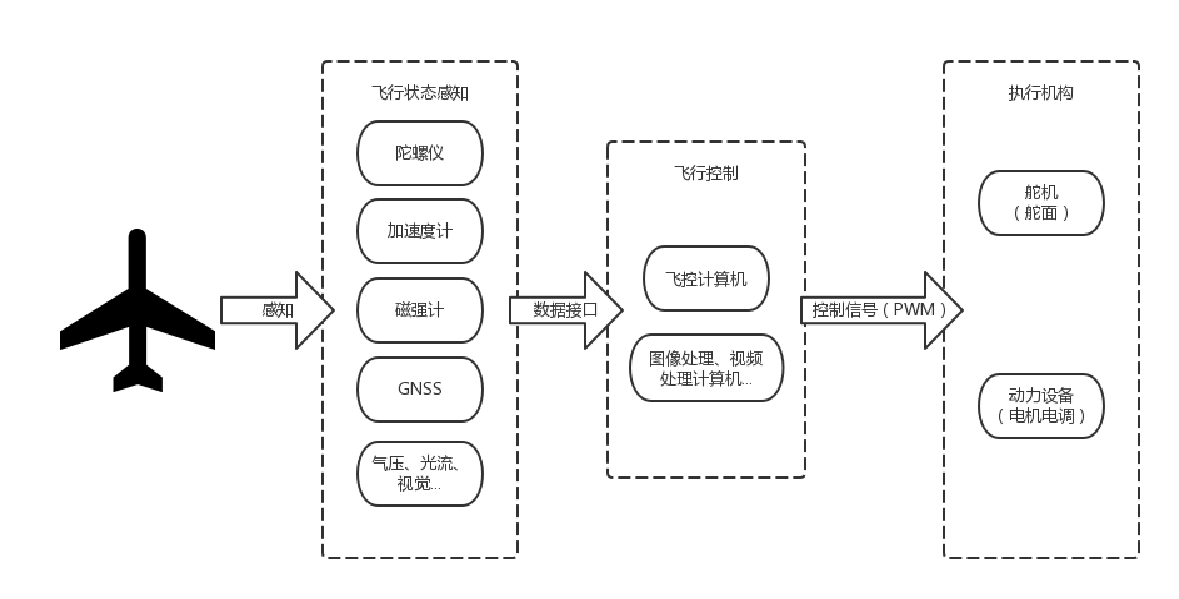
4、作用
- 感知,解决飞行器在哪里的问题;
- 控制,解决飞行器怎么去的问题;
- 决策,解决飞行器去哪儿的问题;
5、产品
- APM:全名Ardupilot Mega,2007年推出的基于Arduino平台研发的自动驾驶仪,是较为早期开源并且持续至今的开源无人机项目。现在已经停产。
- Pixhawk:前身是APM,由于APM的处理器接近满负荷(8位处理器),所以硬件厂商3DR推出了32位ARM处理器,第一代产品是PX4系列,第二代产品是Pixhawk。

七、地面站
- 一个调试,检测飞控的工具。
- 比较常见的有Mission Planner(简称MP)和QGroundControl(简称QGC),传输协议都是MAVLink。 MP地面站主要用APM固件多一些 QGC地面站用PX4固件多一点
- MAVLink:一种轻量级的传输协议,用于无人机之间或机载组件之间的通信。
八、数传
数传是用于飞控和地面站之间的数据传输。简单说是一条数据线,但是它是无线的。目的是调参方便、遥测数据、远程监控,不用插线,而且可以在飞行过程中调参,传回飞控的飞行数据。
九、深度相机
总结
本文简要记录四旋翼无人机的基本组成
参考文献
内容均来自网络














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









