









目录
1. 前言
在工业自动化和控制系统领域,PID 控制器因其简单有效的特性被广泛应用。然而,传统 PID 参数整定方法往往依赖人工经验或固定算法,难以适应复杂多变的系统环境。粒子群优化(PSO, Particle Swarm Optimization)算法作为一种新兴的智能优化算法,为 PID 参数优化提供了新的思路。本文将深入探讨粒子群算法优化 PID 控制的原理、实现过程,并通过一个完整的实例展示其应用效果,旨在帮助读者全面理解这一技术并激发在实际项目中的应用灵感。
2. PID 控制器基础
PID 控制器通过比例(P)、积分(I)、微分(D)三个参数对控制量进行调整,其输出公式为:

其中,Kp 为比例系数,Ki 为积分系数,Kd 为微分系数,e(t) 为设定值与实际值的偏差。
这三个参数的整定对控制系统性能至关重要。合适的参数能使系统快速准确地跟踪设定值,避免超调和振荡;而不当的参数可能导致系统响应迟缓、稳态误差大甚至不稳定。
3. 粒子群优化算法概述
粒子群优化算法是一种模拟鸟群觅食行为的群体智能优化算法。在算法中,每个粒子代表一个潜在的解决方案,具有位置和速度属性。粒子在解空间中飞行,通过跟踪自身历史最佳位置(个体极值)和群体历史最佳位置(全局极值)来更新速度和位置,从而逐步逼近最优解。
其更新公式为:
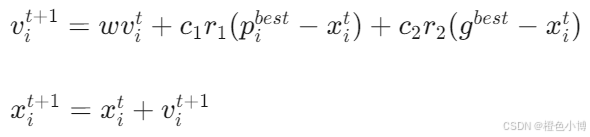
其中,vi 为粒子速度,xi 为粒子位置,w 为惯性权重,c1 和 c2 为学习因子,r1 和 r2 为随机数,pibest 为个体极值,gbest 为全局极值。
4. 粒子群算法优化 PID 参数的步骤
-
初始化粒子群 :随机生成一定数量的粒子,每个粒子的位置对应一组 PID 参数(Kp、Ki、Kd),并初始化粒子的速度。
-
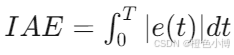
定义适应度函数 :适应度函数用于评价粒子(即 PID 参数)的优劣。常见的适应度指标包括积分绝对误差(IAE)、积分平方误差(ISE)、积分时间绝对误差(ITAE)等。例如,IAE 定义为:
3. 更新个体极值和全局极值 :对于每个粒子,比较其当前位置对应的适应度值与个体极值的适应度值,若更优则更新个体极值;在群体中寻找适应度值最优的粒子,更新全局极值。
4. 更新粒子速度和位置 :根据上述 PSO 更新公式调整粒子速度和位置,确保位置(PID 参数)在合理范围内。
5. 迭代优化 :重复步骤 3 和 4,直至达到最大迭代次数或满足收敛条件,输出最优 PID 参数。
5. PSO - PID 控制
5.1 问题描述
假设有一个温度控制系统,目标是使实际温度快速准确地跟踪设定温度。系统模型可近似为一阶惯性环节加纯滞后:
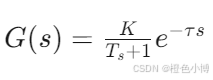
其中,K=2,T=5,τ=2。采用 PID 控制器进行温度调节,利用粒子群算法优化 PID 参数。
5.2 代码实现
import numpy as np
import matplotlib.pyplot as plt
# 定义温度系统模型(一阶惯性加延迟)
# 定义温度系统模型(一阶惯性加延迟)
class TemperatureSystem:
def __init__(self, K=2, T=5, tau=2):
self.K = K # 系统增益
self.T = T # 时间常数
self.tau = tau # 纯滞后时间
self.temperature = 0 # 初始温度(修正:添加了此行)
self.integral = 0 # 用于 PID 积分项
self.derivative = 0 # 用于 PID 微分项
self.prev_error = 0 # 上一次的误差
self.time = 0 # 当前时间步(离散时间)
self.delay_time = self.tau # 纯滞后时间(离散时间单位)(修正:添加了此行)
def pid_control(self, setpoint, kp, ki, kd, dt):
error = setpoint - self.temperature
self.integral += error * dt
self.derivative = (error - self.prev_error) / dt
output = kp * error + ki * self.integral + kd * self.derivative
self.prev_error = error
return output
# 模拟温度变化(考虑纯滞后)
def update_temperature(self, control_input):
# 简化模型:假设温度变化速率与控制输入相关
temperature_change = (control_input * self.K) / (self.T) * (self.time - self.delay_time)
if self.time > self.delay_time:
self.temperature += temperature_change
self.time += 1
return self.temperature
# 定义粒子群优化 PID 参数类
class PSOPID:
def __init__(self, system, num_particles=30, max_iterations=100, c1=2.0, c2=2.0, w=0.7):
self.system = system
self.num_particles = num_particles
self.max_iterations = max_iterations
self.c1 = c1
self.c2 = c2
self.w = w
# 初始化粒子群(位置为 PID 参数,速度为随机值)
self.particles = np.random.rand(num_particles, 3) * 2 # 参数范围:0-2
self.velocities = np.random.rand(num_particles, 3) * 0.5 - 0.25 # 速度初始范围
# 初始化个体极值和全局极值
self.personal_best_positions = self.particles.copy()
self.personal_best_scores = np.full(num_particles, np.inf)
self.global_best_position = np.zeros(3)
self.global_best_score = np.inf
# 定义适应度函数(IAE)
def calculate_fitness(self, pid_params):
Kp, Ki, Kd = pid_params
system_sim = self.system() # 创建系统副本进行模拟
setpoint = 50 # 设定温度
dt = 1 # 采样时间间隔
total_error = 0
system_sim.temperature = 20 # 初始温度
system_sim.time = 0
system_sim.delay_time = system_sim.tau / dt # 计算延迟对应的离散时间步数
for _ in range(100): # 模拟 100 个时间步
control_output = system_sim.pid_control(setpoint, Kp, Ki, Kd, dt)
system_sim.update_temperature(control_output)
error = setpoint - system_sim.temperature
total_error += abs(error) * dt
return total_error
# 更新粒子群
def update_particles(self):
for i in range(self.num_particles):
# 计算当前粒子适应度
current_score = self.calculate_fitness(self.particles[i])
# 更新个体极值
if current_score < self.personal_best_scores[i]:
self.personal_best_scores[i] = current_score
self.personal_best_positions[i] = self.particles[i].copy()
# 更新全局极值
if current_score < self.global_best_score:
self.global_best_score = current_score
self.global_best_position = self.particles[i].copy()
# 更新速度和位置
r1, r2 = np.random.rand(), np.random.rand()
self.velocities[i] = (self.w * self.velocities[i] +
self.c1 * r1 * (self.personal_best_positions[i] - self.particles[i]) +
self.c2 * r2 * (self.global_best_position - self.particles[i]))
# 更新位置并限制在合理范围
self.particles[i] += self.velocities[i]
self.particles[i] = np.clip(self.particles[i], 0, 2)
# 执行 PSO 优化
def optimize(self):
for iteration in range(self.max_iterations):
self.update_particles()
print(
f"Iteration {iteration + 1}, Best Score: {self.global_best_score:.2f}, Best PID: {self.global_best_position}")
return self.global_best_position
# 主程序
if __name__ == "__main__":
# 创建温度系统和 PSO 优化器
temp_system = TemperatureSystem()
pso_pid = PSOPID(TemperatureSystem)
# 执行 PSO 优化获取最优 PID 参数
optimal_pid = pso_pid.optimize()
print(f"\nOptimal PID Parameters: Kp={optimal_pid[0]:.4f}, Ki={optimal_pid[1]:.4f}, Kd={optimal_pid[2]:.4f}")
# 使用最优 PID 参数进行系统控制模拟
setpoint = 50
dt = 1
simulation_time = 100
temperatures = []
control_outputs = []
temp_system.temperature = 20 # 重置系统温度
temp_system.time = 0
temp_system.delay_time = temp_system.tau / dt
for _ in range(simulation_time):
control_output = temp_system.pid_control(setpoint, optimal_pid[0], optimal_pid[1], optimal_pid[2], dt)
control_outputs.append(control_output)
current_temp = temp_system.update_temperature(control_output)
temperatures.append(current_temp)
# 绘制结果
time_axis = np.arange(1, simulation_time + 1)
plt.figure(figsize=(10, 6))
plt.plot(time_axis, temperatures, label='Actual Temperature')
plt.axhline(y=setpoint, color='r', linestyle='--', label='Setpoint')
plt.xlabel('Time')
plt.ylabel('Temperature')
plt.title('PSO - PID Temperature Control')
plt.legend()
plt.grid(True)
plt.show()
根据运行结果可以看出,像这种无损失无消耗的温控系统,直接用比例控制就是最好的。
以上代码仅供PSO-PID控制器学习,可以去设计其他系统看一看结果 。
5.3 代码解析
-
系统模型 :
TemperatureSystem类模拟了温度系统的动态行为,包括 PID 控制计算和温度更新过程,考虑了纯滞后特性对控制的影响。 -
PSO 优化器 :
PSOPID类实现了粒子群算法的核心逻辑。初始化粒子群时,随机生成 PID 参数组合作为粒子位置,并设置初始速度。在每次迭代中,通过调用calculate_fitness方法计算每个粒子的适应度(IAE 指标),更新个体极值和全局极值,并依据 PSO 更新公式调整粒子速度和位置。经过多轮迭代,逐步逼近最优 PID 参数。 -
优化与控制模拟 :主程序先创建温度系统和 PSO 优化器实例,执行优化过程获取最优 PID 参数。随后,利用该参数对温度系统进行控制模拟,记录温度变化和控制输出,并绘制控制效果曲线,直观展示系统在 PSO 优化后的 PID 控制下的响应特性。
6. 总结
粒子群算法优化 PID 控制为解决复杂系统控制问题提供了一种高效、智能的方法。通过本文的详细介绍和实例演示,大家可以清晰理解粒子群算法如何与 PID 控制有机结合,并掌握其 Python 实现技巧。
在实际应用中,可根据具体系统特性调整 PSO 参数(如粒子数量、最大迭代次数、学习因子等)和适应度函数,以进一步提升控制性能。随着人工智能技术的不断发展,智能优化算法在控制领域的应用将越来越广泛,有望为工业自动化带来更优质的解决方案。我是橙色小博,关注我,一起在人工智能领域学习进步!


















 426
426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











