





三相桥式整流电路,单位功率因数,电压电流双闭环控制,dq解耦前馈控制,双环PI控制,SVPWM调制和SPWM调制模型。


主电路结构

电流环
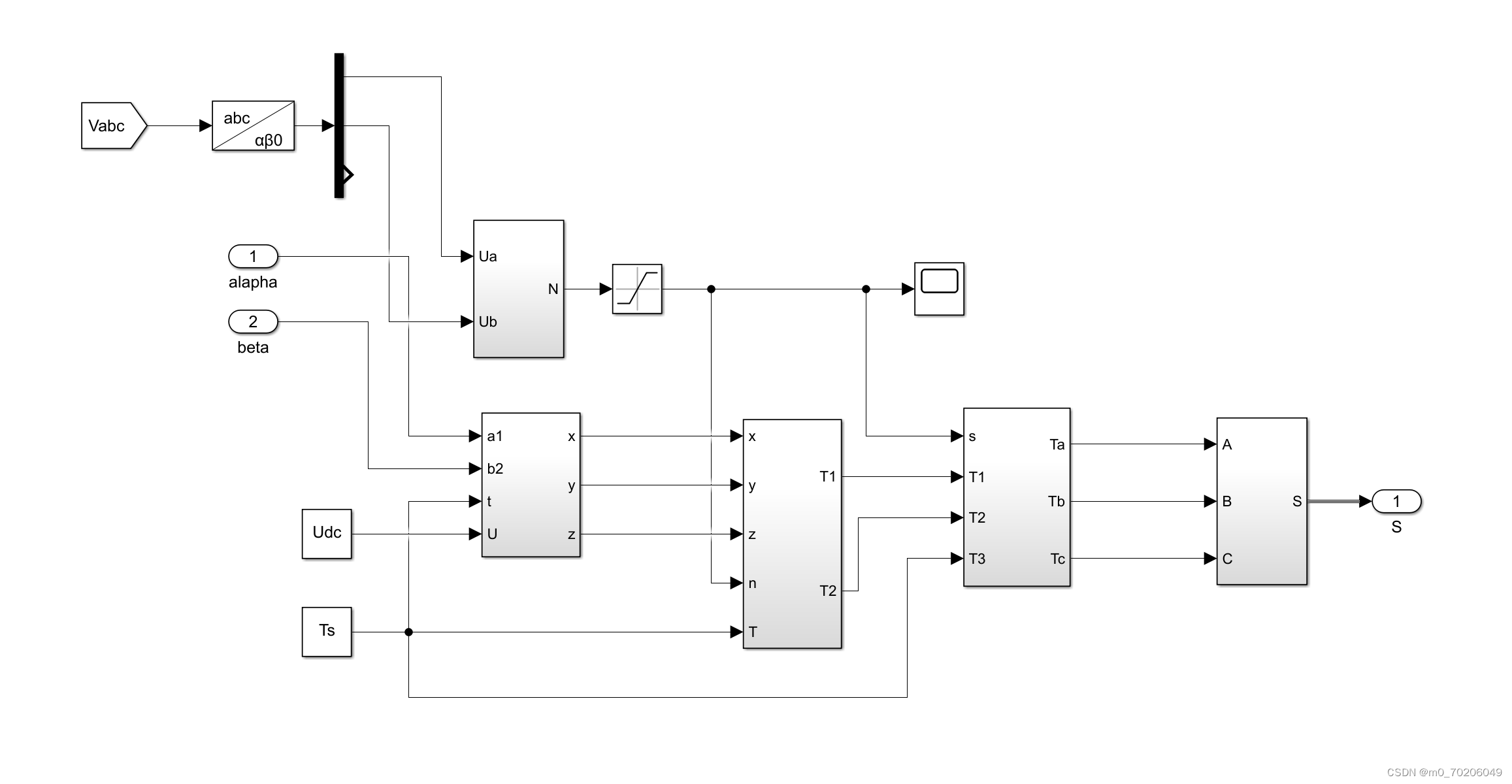
SVPWM模块

直流侧电压

A相电压和电流波形 单位功率因数

三相桥式整流电路,单位功率因数,电压电流双闭环控制,dq解耦前馈控制,双环PI控制,SVPWM调制和SPWM调制模型。
主电路结构
电流环
SVPWM模块
直流侧电压
A相电压和电流波形 单位功率因数
 9790
9790











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























