







vision master ——机器臂移动
文章目录
前言
使用机器臂按照坐标移动,科技改变生活
一、路径选择
- 定基准点(确定平面的原点,最好不是边框)
- 起点(从规定路线的起点开始)
- 方向(规定路径的方向,优先x或者y)
二、确定坐标
1.快速匹配
1.先做出9点标定图

- 旋转次数为0
- 确定基准点与方向
- 确定偏移x(间隔)
- 定义标定文件路径
2.定位每一个点坐标
3.生成标定文件
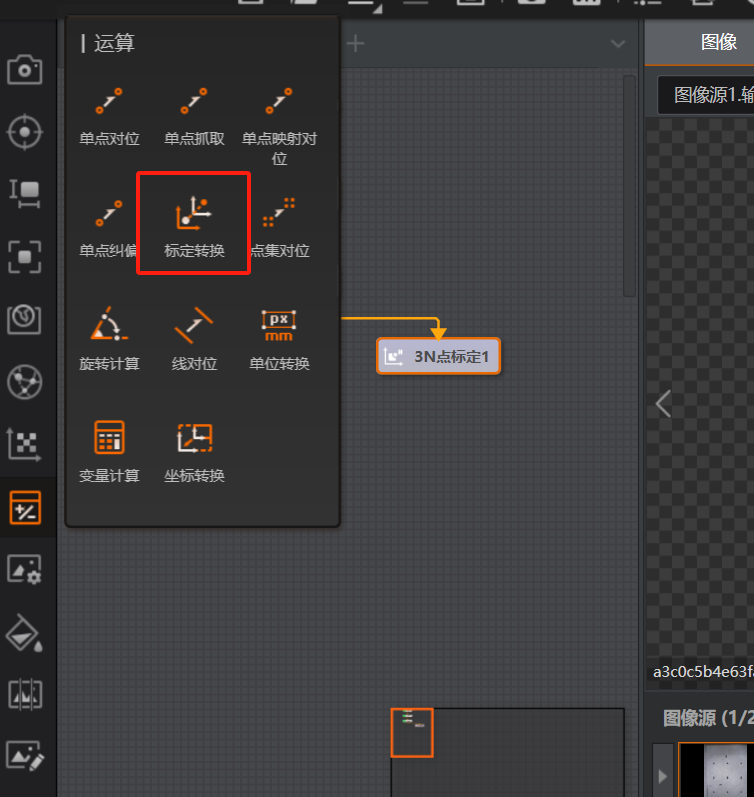
- 标定转换
- n点标定禁用
4.格式化
输出标定数据
另外一种是暴力定位
三、组合模块循环
1.先设置组合模块
- 打开循环使能

- 循环结束值(变量)

- 输入设置
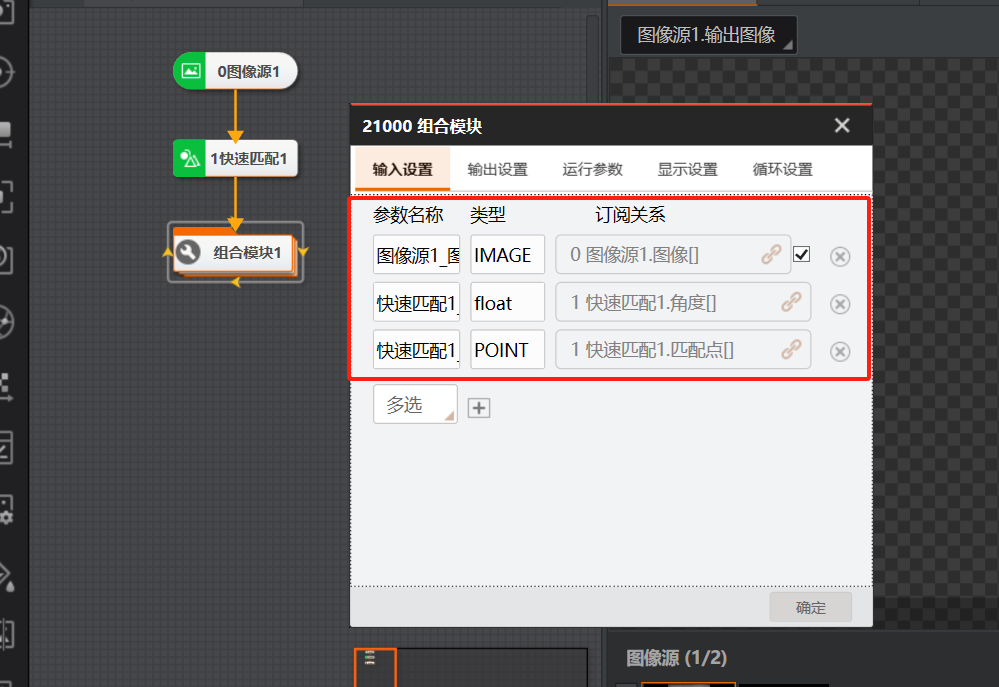
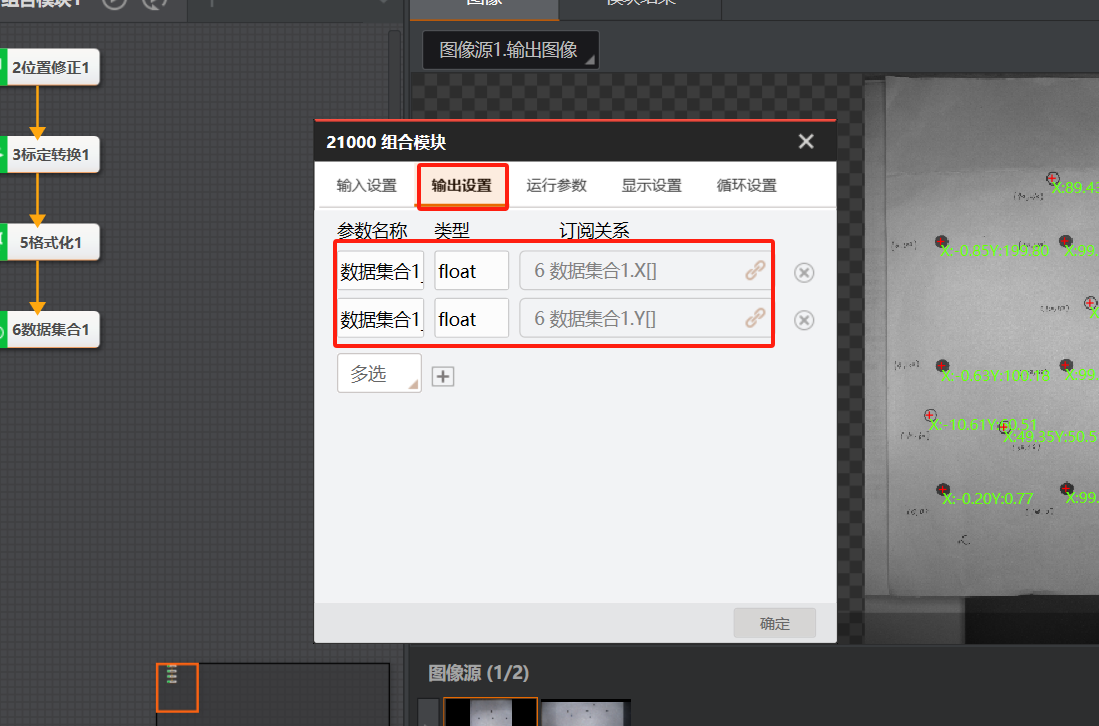
2.进入组合模块
- 位置修正

- 标定转换

- 数据集合


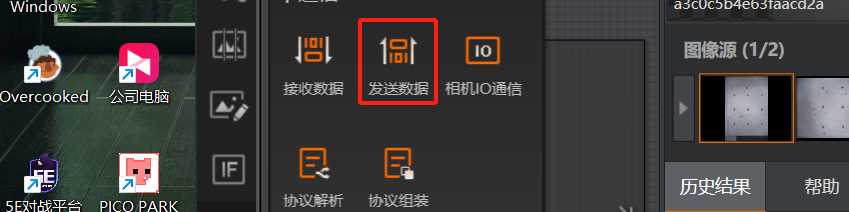
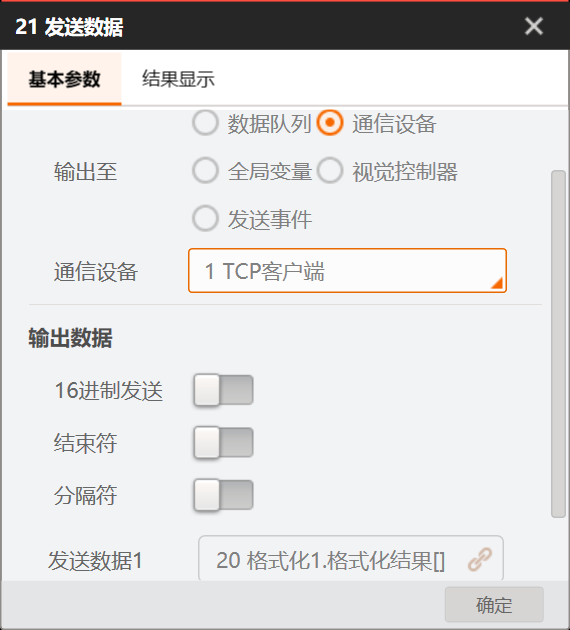
四、网口通讯
1.将视觉结果发送出去


总结
以上就是发送视觉结果(坐标定位信息)的流程。

















 1131
1131

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









