






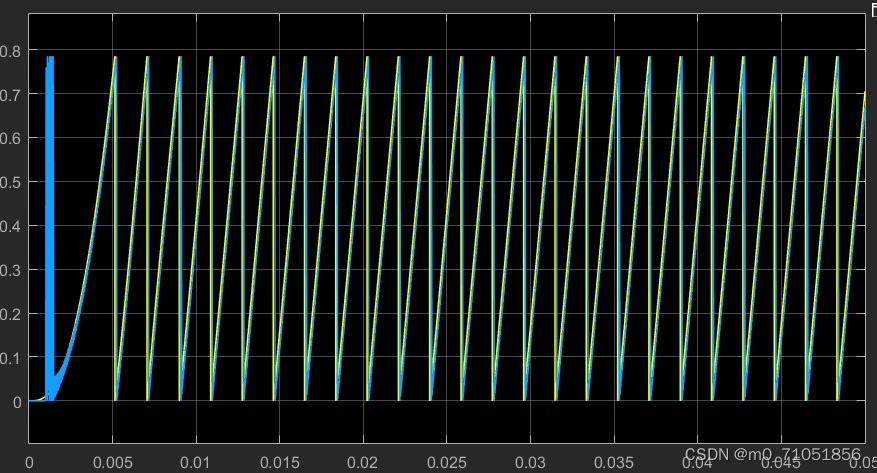
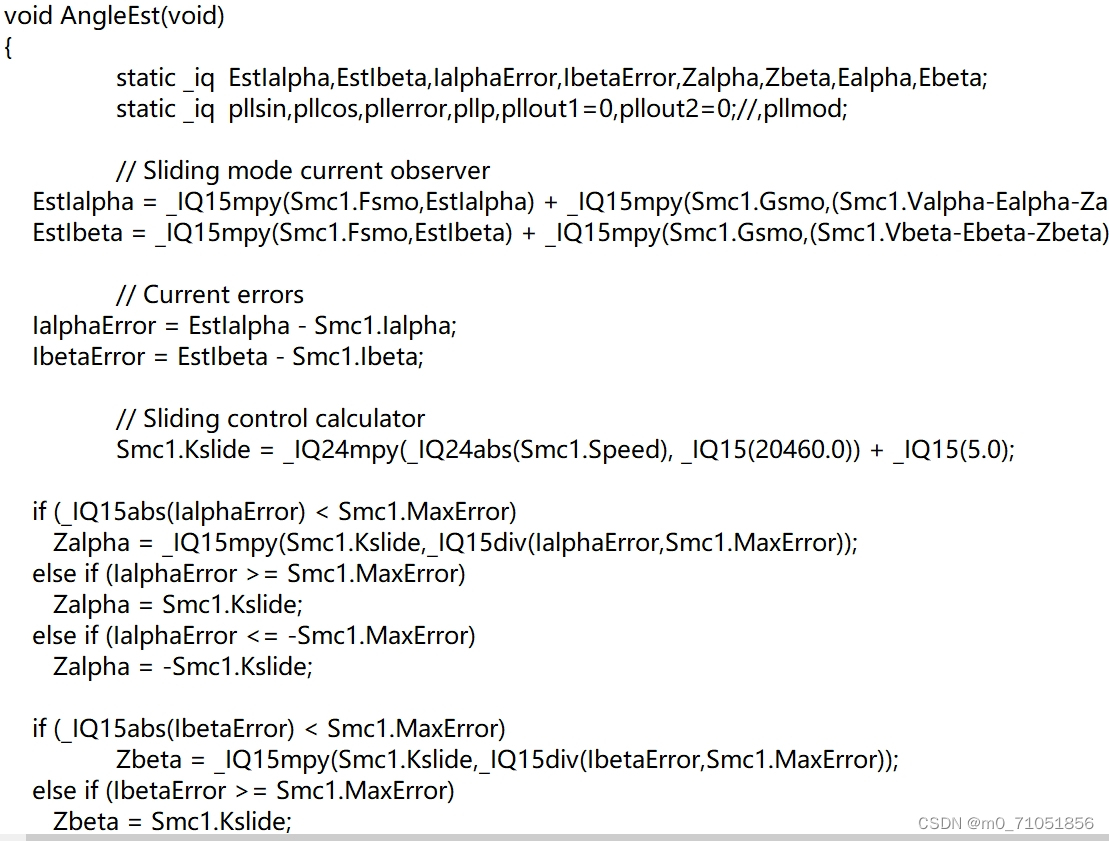
同步机无传感滑膜观测器模型加代码 仿真模型+代码(基于28035),典型的smo+pll方案
代码为实际应用代码,非一般玩票代码可比(非ti例程);
少数文件中文注释有乱码,请知悉…
 YID:69500
YID:69500 621621002912
621621002912
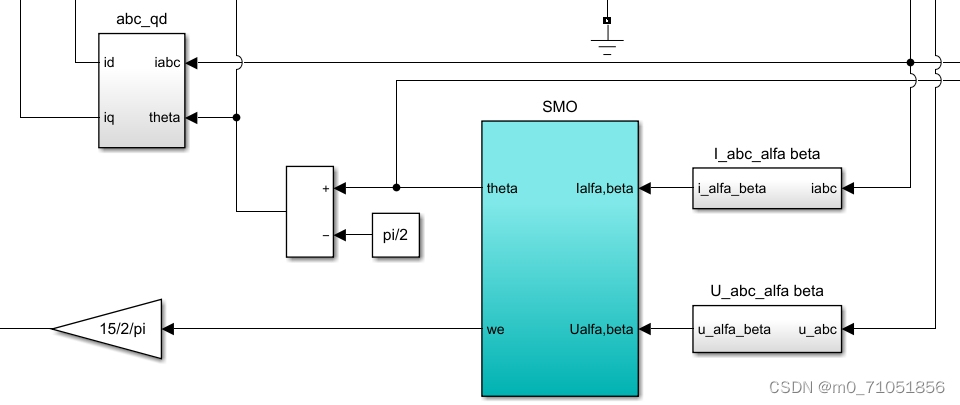
同步机无传感滑膜观测器模型加代码 仿真模型+代码(基于28035),典型的smo+pll方案
代码为实际应用代码,非一般玩票代码可比(非ti例程);
少数文件中文注释有乱码,请知悉…
YID:69500621621002912
 422
2329
422
2329











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
























