







 本文介绍了如何利用红外对管实现小车的循迹功能,通过GPIO配置特殊引脚并启用中断,检测黑色地面实现转向,同时使用Delay调整转弯力度。关键步骤包括初始化GPIO、读取红外电平状态以及编写控制循迹的函数。
本文介绍了如何利用红外对管实现小车的循迹功能,通过GPIO配置特殊引脚并启用中断,检测黑色地面实现转向,同时使用Delay调整转弯力度。关键步骤包括初始化GPIO、读取红外电平状态以及编写控制循迹的函数。
我们的思路是通过将红外对管装到小车的车头,红外朝地面,当红外扫描到底下有黑色的时候就进行转向
当4个红外对管都没发现底下有黑色线的时候,小车就一直往前走
当最左1和左2单个或者左1&左2都识别到的时候,小车就往左转
当最右1和右2单个或者右1&右2都识别到的时候,小车就往右转
我们也可把红外模块当做按键,当下面是黑色的时候就是高电平,不是黑色的时候就是低电平,所以这里需要用到中断
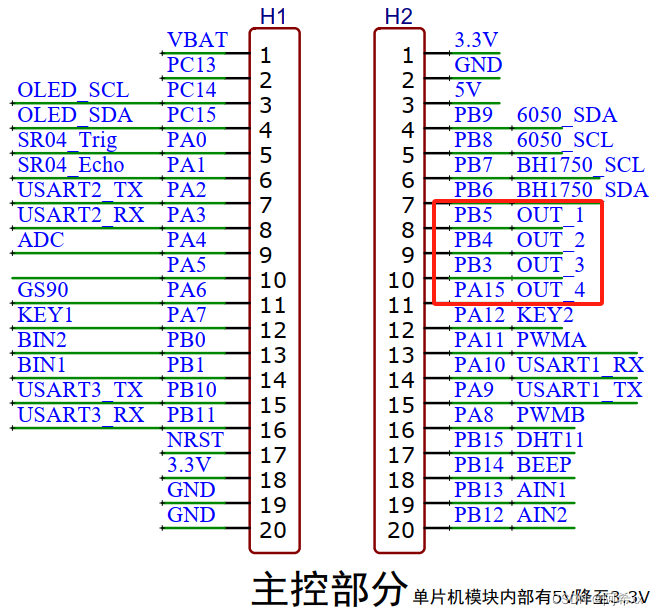
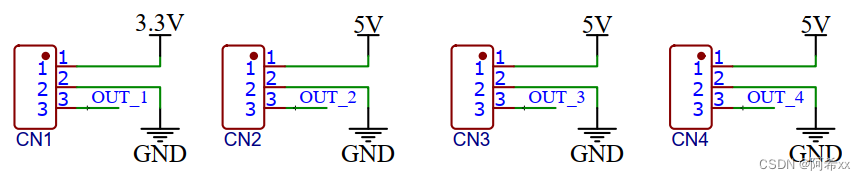
查看原理图
红外对管分别对应PB5,PB4,PB3,PA15
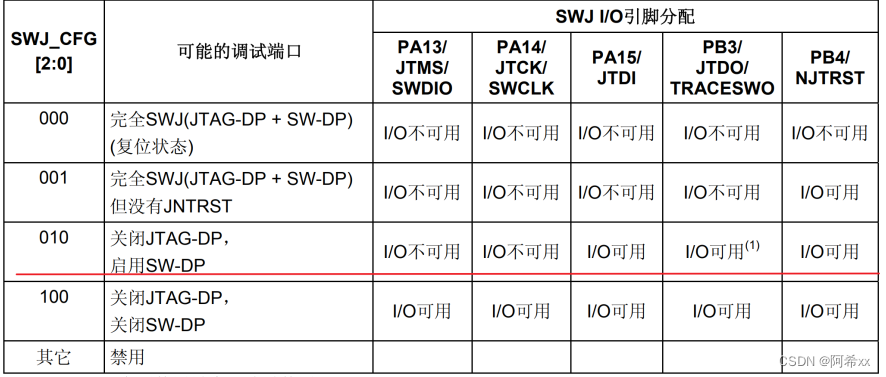
接下来我们看手册能知道PB5,PB4,PB3,PA15这几个脚都是特殊脚
所以我们需要JTAG-DP 启用SW-DP ,我们重映射配置应写为
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);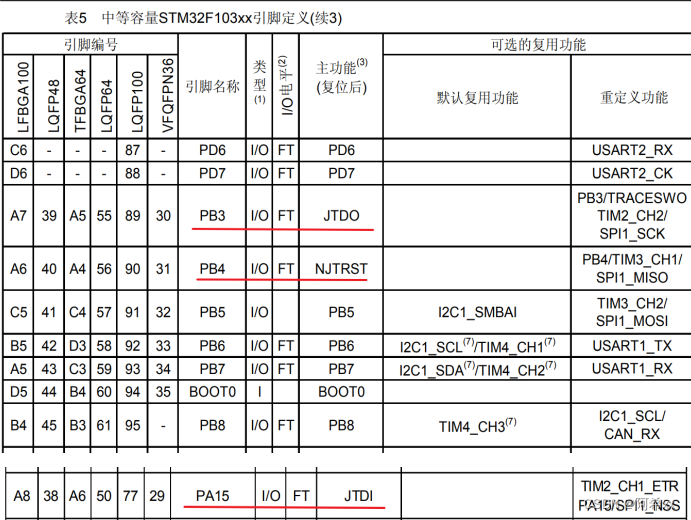
注意:不要关闭所有的烧录脚,不然会造成无法通过串口烧录等情况,只能通过usb口刷官方文件复位
我们可以使用GPIO_ReadInputDataBit这个函数来读取四个红外对管的电平状态,用作判断底下是否为黑线
相关宏定义
#define HW_1 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_5)//读取 PB5
#define HW_2 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_4)//读取 PB4
#define HW_3 GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_3)//读取 PB3
#define HW_4 GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_15)//读取 PA15GPIO初始化
void Infrared_GPIO_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB,ENABLE);//使能PORTA时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//需要关闭JTAG-DP 启用SW-DP才能使用3/4/5 IO口
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3 | GPIO_Pin_4 | GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOB, &GPIO_InitStructure);
}封装循迹函数
这里我们可以通过调节Delay时间来控制拐弯的力度,这个需要自己细心的慢慢调
//通过调节Delay来控制拐弯的力度
void Infrared_Hw(void)
{
//四个红外为低电平的时候向前走
if(HW_1 ==0 && HW_2 ==0 && HW_3 ==0 && HW_4 ==0)
{
Forward();
printf("1+2+3+4\n");
OLED_ShowString(x,y,"Forward");
Delay_ms(50);
}
//第二个红外为高电平的时候向右走
if(HW_1 ==0 && HW_2 ==1 && HW_3 ==0 && HW_4 ==0)
{
Rightward();
printf("2\n");
OLED_ShowString(x,y,"Right2");
Delay_ms(150);
}
//第一个红外为高电平的时候向右走
if(HW_1 ==1 && HW_2 ==0 && HW_3 ==0 && HW_4 ==0)
{
Rightward();
printf("1\n");
Delay_ms(250);
}
//第一个红外和第二个红外同时为高电平的时候向右走
if(HW_1 ==1 && HW_2 ==1 && HW_3 ==0 && HW_4 ==0)
{
Rightward();
printf("1+2\n");
Delay_ms(300);
}
//第三个红外为高电平的时候向左走
if(HW_1 ==0 && HW_2 ==0 && HW_3 ==1 && HW_4 ==0)
{
Leftward();
printf("3\n");
OLED_ShowString(x,y,"Left3");
Delay_ms(150);
}
//第四个红外为高电平的时候向左走
if(HW_1 ==0 && HW_2 ==0 && HW_3 ==0 && HW_4 ==1)
{
Leftward();
printf("4\n");
OLED_ShowString(x,y,"Left4");
Delay_ms(250);
}
//第三个红外和第四个红外同时为高电平的时候向左走
if(HW_1 ==0 && HW_2 ==0 && HW_3 ==1 && HW_4 ==1)
{
Leftward();
printf("3+4\n");
OLED_ShowString(x,y,"Left3+4");
Delay_ms(300);
}
}
















 3758
3758

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









