







产品介绍
minifly是正点原子官方推出的一款四轴无人机,它的特点主要包括:
开源,支持二次开发
支持定高飞行,手动飞行,以及定点飞行(需要搭配流光模块)
支持4D空翻
支持抛飞
支持有头模式(X模式)和无头模式飞行
支持一键起飞,一键降落
支持手机WiFi控制,拍照和视频录制(需要搭配WIFI摄像模块)
支持USB固件升级
支持多种扩展模块
四轴飞行器基本介绍
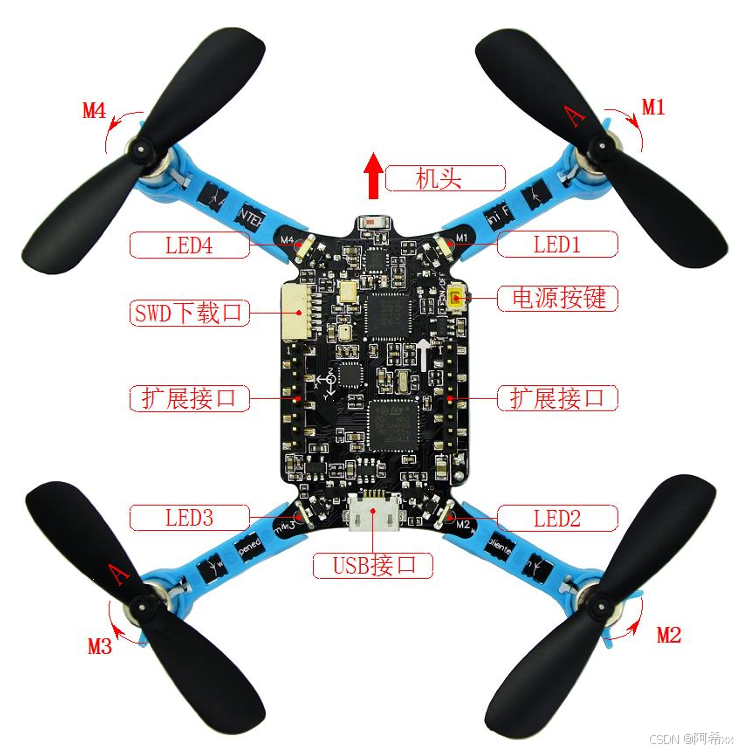
1.电源键:短按进行开关机;关机状态长按3s进行USB固件升级;开机状态长按3s重置NRF无线配置
2.USB接口:可用于USB固件升级以及电池充电接口
3.SWD下载口:MCU和NRF的程序下载接口
4.扩展接口:左右各一个8pin的排针,包括:SPI,I2C,UART,GPIO和电源等接口
5.LED1:红绿LED,心跳指示(绿色LED),低电指示(红色LED)
6.LED2:蓝色LED,电源指示灯
7.LED3:蓝色LED,通电常亮,充电闪烁
8.LED4:红绿LED.无线通讯数据接收(绿色LED)和无线通讯数据发送(红色LED)
9.机头:指示飞机方向
10.电机和桨叶:M1,M3电机使用A桨(正桨,顺时针旋转),M2,M4电机使用B桨(反桨,逆时针旋转)
遥控器介绍

天线接口:接配套的2.4G天线,天线90度朝天信号更好(需在使用前把天线接上)
USB接口:可用于USB固件升级以及电池充电接口
电源开关:ON开机,OFF关机,充电时需打到OFF
SWD&UART:程序下载接口和串口
LED1:红灯表示通讯失败
LED2:蓝灯表示通讯成功
LED3:蓝灯常亮增长充电,冲完电熄灭
左摇杆(按下去):一键起飞,一键降落
右摇杆(按下去):微调
KEY_L:紧急停机
KEY_R:4D翻滚,查看调试界面
油门摇杆(左):实现四轴上升,下降,左旋转.右旋转;
方向摇杆(右):实现四轴前后左右运动
蜂鸣器:用于低电量报警和各种操作提示:
1.传感器校准PASS提示音,频率越高,间隔时间越短,响的越快
2.空翻提示音
3.微调提示音
4.电池低电提示音,不停响并且LED1为红灯表示四轴电量低,否则就是遥控器电量低
提示
给遥控器充电,需要打到OFF
充电时界面显示的电量并非实际电池电量,充电约为1小时左右
电量显示最大百分比为99%

















 2766
2766

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









