







 本文详细介绍了无人机飞行中的重要组件选择,包括电机、电调、桨叶、GPS模块、飞控、遥控器、电源管理、充电技术以及机型选择,为新手提供全面的配置建议。
本文详细介绍了无人机飞行中的重要组件选择,包括电机、电调、桨叶、GPS模块、飞控、遥控器、电源管理、充电技术以及机型选择,为新手提供全面的配置建议。
0. 一些重要的概念
- 航时:单电池飞行时间;
- 轴距:对角电机之间的距离;
- 起飞重量
- 最大载重
- 负载
- 云台相机
- 极限速度
- 抗风等级
- 极限高度:受海拔空气密度影响;
1. 电机选型
电机分为有刷电机和无刷电机,不要买错了,无刷是四轴的主流。它力气大,耐用。
如某无刷电机2214 980kv

无刷电机两个重要的参数
- 尺寸
如2214,2212电机,2018电机等等,这是电机的尺寸,单位mm。
不管什么牌子的电机,具体都要对应4位这类数字,其中前面2位是电机转子的直径,后面2位是电机转子的高度。注意,不是外壳哦。简单来说,前面2位越大,电机越肥,后面2位越大,电机越高。 - 电机极数
- 电机kv值,如980kv
这个kv是外加1v电压对应的每分钟空转转速。
几个重要的结论:
- 极数与电机扭矩成正比,与电机转速成反比;
- kv额定值提供了对电机每施加一伏电压将经历多少转的估计;
- kv值与电机转速成正比,与扭矩成反比;
- 所以,电机极数与kv值之间的关系是反比;
品牌:
新西达XXD、朗宇SunnySky
2. 电调选型
原则:电池电流>电调电流>电机电流
品牌:
- 新西达(XXD)
- 中特威(ZTW)
- 好盈(HobbyWing)
几个重要的参数:
- 最大承受(提供)电流,如20A
- 最大承受电压,如3~6s
结论:
12V电源,一般选20A或30A就够了;
24V电源,一般选60A或80A;
接线:
输出端:任意调换3条中的两条,电机转向;
输入端的线:两条电源线一黑一红(粗),3或2条信号线:白的是pwm信号线,黑的是地线;

3. 桨叶选型
桨型?如1045
桨型中1045这4位数字,前2位10代表桨的直径(单位:英寸inch, 1英寸=254毫米),后2位45代表桨的角度(单位:度°)。
结论:
螺旋桨越大,升力就越大,但需要更大的电机扭矩;
螺旋桨转速越高,升力越大;
电机的kv越小,转动力量就越大;
综上所述,大螺旋桨就需要用低kv电机,小螺旋桨就需要高kv电机(因为需要用转速来弥补升力不足),如果高kv带大桨,力量不够,那么就很困难,实际还是低俗运转,电机和电调很容易烧掉。如果低kv带小桨,完全没有问题,但升力不够,可能造成无法起飞。
例如:常用1000kv电机,配10寸左右的桨。
4. GPS选型
6m
7m
m8n:
M8N是一种全球卫星导航系统(GNSS)接收机模块。它是由u-blox公司开发的,用于接收全球定位系统(GPS)、伽利略(Galileo)、格洛纳斯(GLONASS)和北斗(BeiDou)等卫星导航系统的信号,并提供定位和导航功能。
m9n
m10:支持GPS、北斗、伽利略和 GLONASS卫星导航系统
性能区别?
都有哪些品牌?
u-blox
5. 飞控
apm
pixhawk2.4.8
pichawk 6
px4
乐迪?
雷迅?

6. 遥控器
遥控器上油门的位置在右边是日本手,在左边是美国手
品牌:
乐迪?
富斯?
天地飞?

7.1 电源
1s电池大致为3.6V-4.2V
电池容量mah,如1000mah电池,如果以1000ma放电,可持续放电1小时。如果以500mh放电,可以持续放电2小时。
为什么要选锂电池:同样电池容量锂电最轻,起飞效率最高。
4200mah?
5200mah?
电池后面多少c是什么意思:
代表电池放电能力,这是普通锂电池和动力锂电池最重要区别,动力锂电池需要很大电流放电,这个放电能力就是C来表示的。如1000mah电池 标准为5c,那么用5x1000mah,得出电池可以以5000mh的电流强度放电。
这很重要,如果用低c的电池,大电流放电,电池会迅速损坏,甚至自燃。
7.2 电源监视模块
8. 充电器
平衡充电器
平衡充电:对于多s的电池,分别对内部单节电池充电。
9. 机型选择
四旋翼分2种机型,1种是+模式:飞行方向(机头)与旋翼重合;1种是x模式:飞行方向(机头)平分旋翼。
+模式:直观,简单,驱动弱,调参容易。
x模式:复杂,稳定,驱动好,调参麻烦。
对于四旋翼,稳定和驱动是第一位的,调参可以站在巨人的肩膀上,因此一般采用x模式。
10. 其他
OSD视频叠加模块:数传、图传、数据叠加显示;
数传:
云台:
相机:
图传:
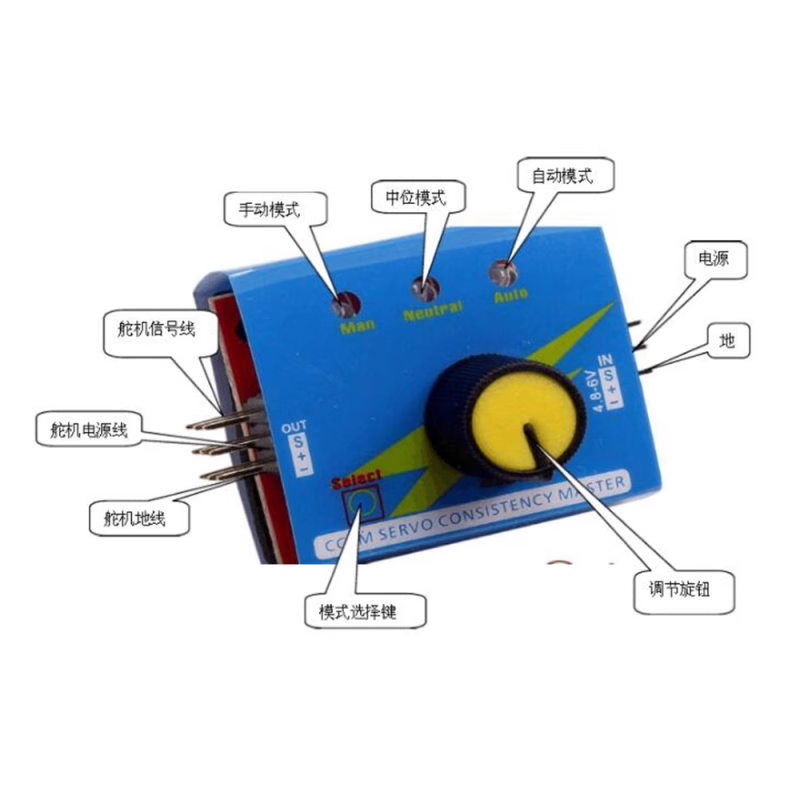
舵机测试仪、电子调速器

















 672
672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









