






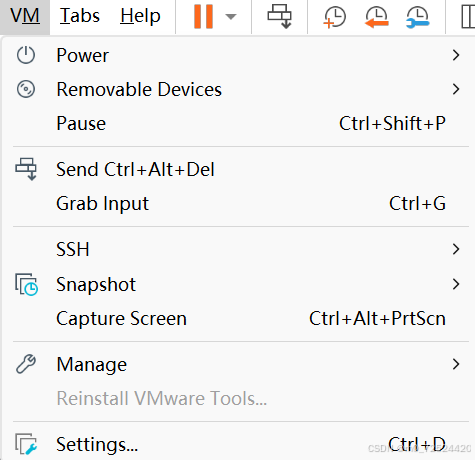
一、系统介绍
宿主机:win11专业版 VMware:17.6.2 Ubuntu:24.04.2 LTS
二、问题描述
宿主机不能向虚拟机中拖拽文件,但是虚拟机可以向宿主机单向拖拽文件,尝试了装和重装VMware Tools,没解决,还是灰色的。后来倒腾过程中发现下共享文件夹都用不了了,之前还可以通过共享文件夹的方式实现文件流转,这下简直没别的办法了,到了必须要解决问题的时候了。
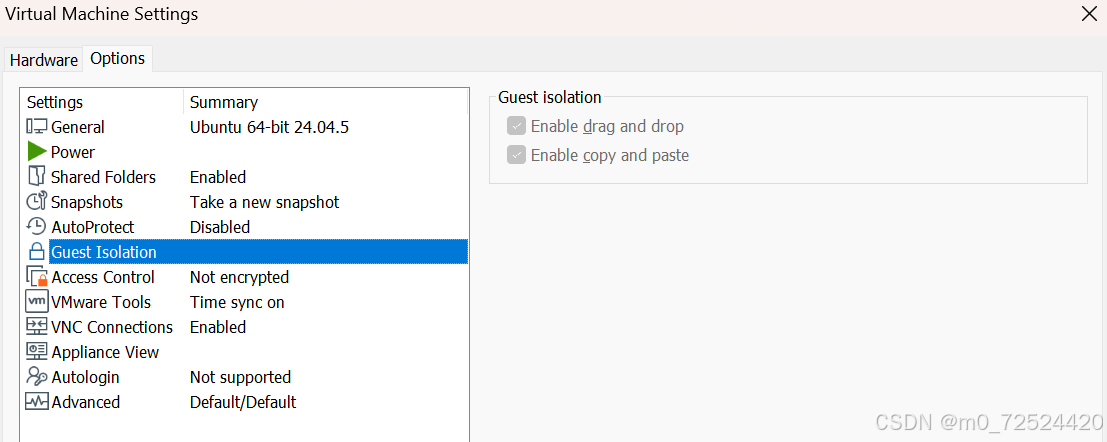
设置了文件夹共享但是在虚拟机中的/mnt/hgfs/目录下竟然没有看到文件夹

三、解决宿主机不能向虚拟机拖拽文件的问题
四处寻找解决办法,很多重复、过时、或者不适用的方法,只好问问大模型。原因貌似是因为:“VMware Workstation 17 中,Windows 11 主机与 Ubuntu 虚拟机之间的拖放功能可能会受到 Ubuntu 默认使用的 Wayland 显示服务器的影响。Wayland 存在已知问题,可能导致从主机到虚拟机的拖放操作无法正常工作”,所以可以通过禁用Wayland的方法恢复文件拖拽功能。
- 永久禁用Wayland,先编辑GDM3配置文件
sudo nano /etc/gdm3/custom.conf
- 找到并取消注释下面这行代码,确保其值为
false,而后关闭保存文件。
WaylandEnable=false
- 重启 GDM3 以应用更改,再重启虚拟机,Over.
sudo systemctl restart gdm3
现在宿主机可以向虚拟机拖拽文件了,但是虚拟机却不能向宿主机拖拽文件,还是单向拖拽...
open-vm-tools和open-vm-tools-desktop都已经装上了是最新版,有时间再摸索下找找其他的解决方法。
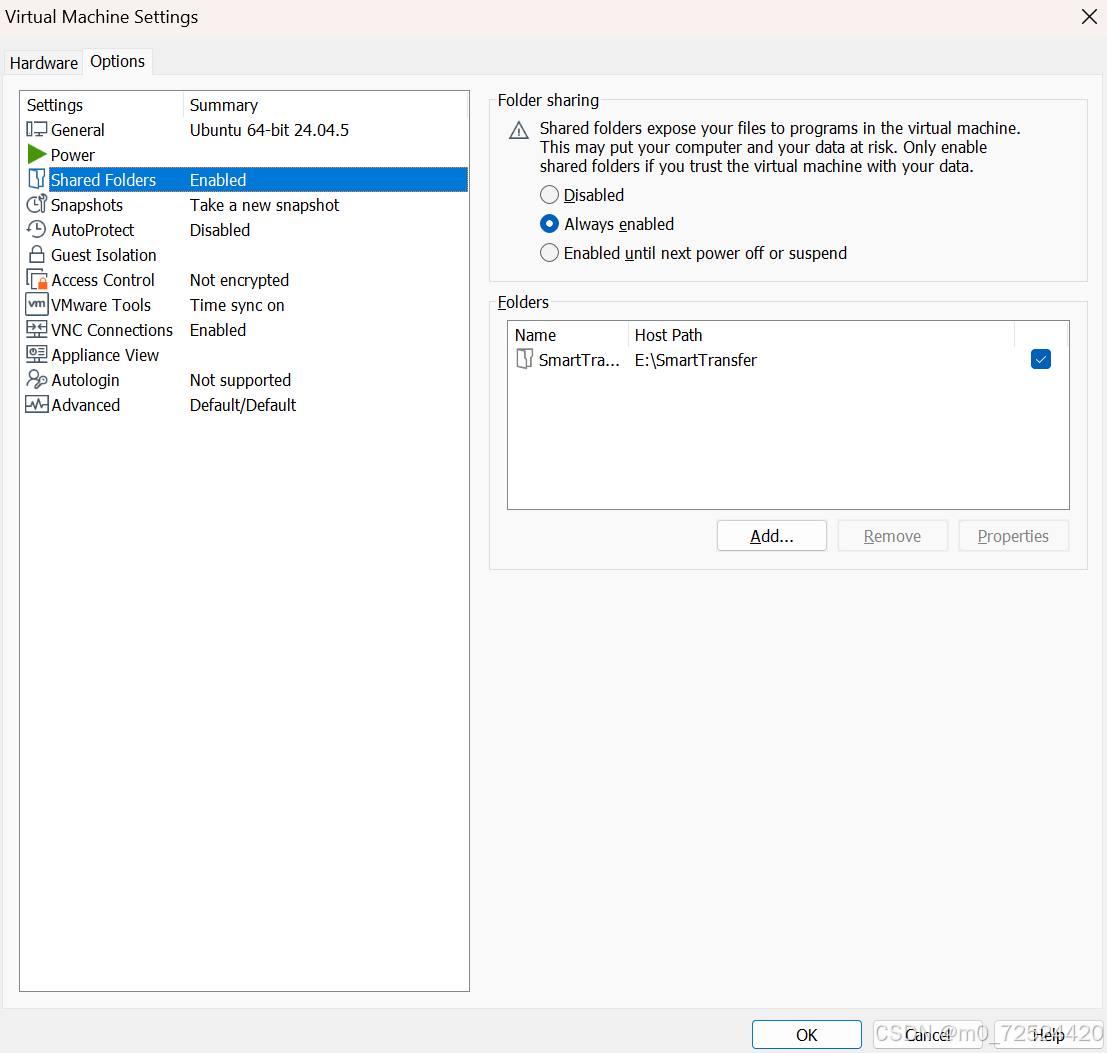
四、解决共享文件夹不显示的问题
之前一直是直接设置共享后在虚拟机/mnt/hgfs/目录下就能看到共享文件夹,后面倒腾一阵之后竟然不见了。
sudo mount -t fuse.vmhgfs-fuse .host:/ /mnt/hgfs -o allow_other运行之后共享文件夹回来了!

















 4282
4282

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









