yolov5是一个目标检测算法,yolo.py是其中的一个核心文件,主要实现了模型的构建和训练。下面是yolo.py的代码详解:
1. 导入必要的库和模块
```python
import torch
import torch.nn as nn
import numpy as np
from collections import OrderedDict
from utils.general import anchors, autopad, scale_img, check_anchor_order, check_file, check_img_size, \
check_requirements, non_max_suppression, xyxy2xywh, xywh2xyxy, plot_one_box
from utils.torch_utils import time_synchronized, fuse_conv_and_bn, model_info
from models.common import Conv, DWConv
```
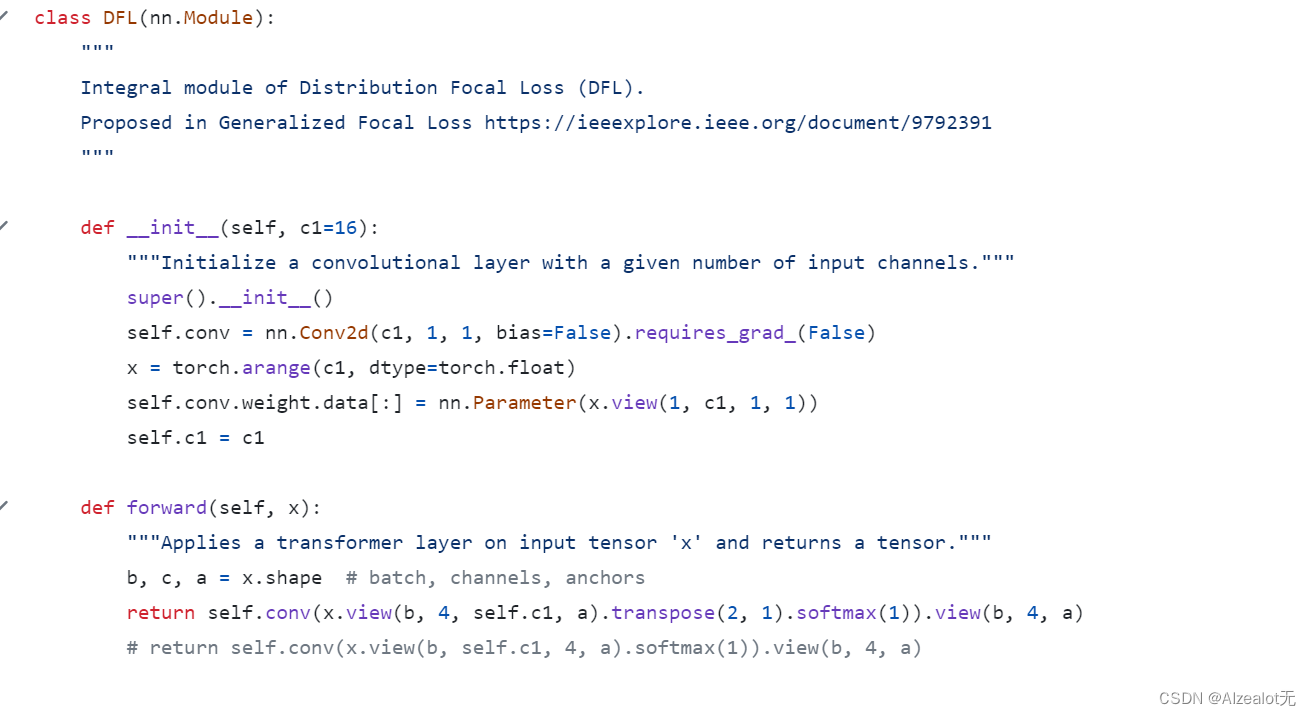
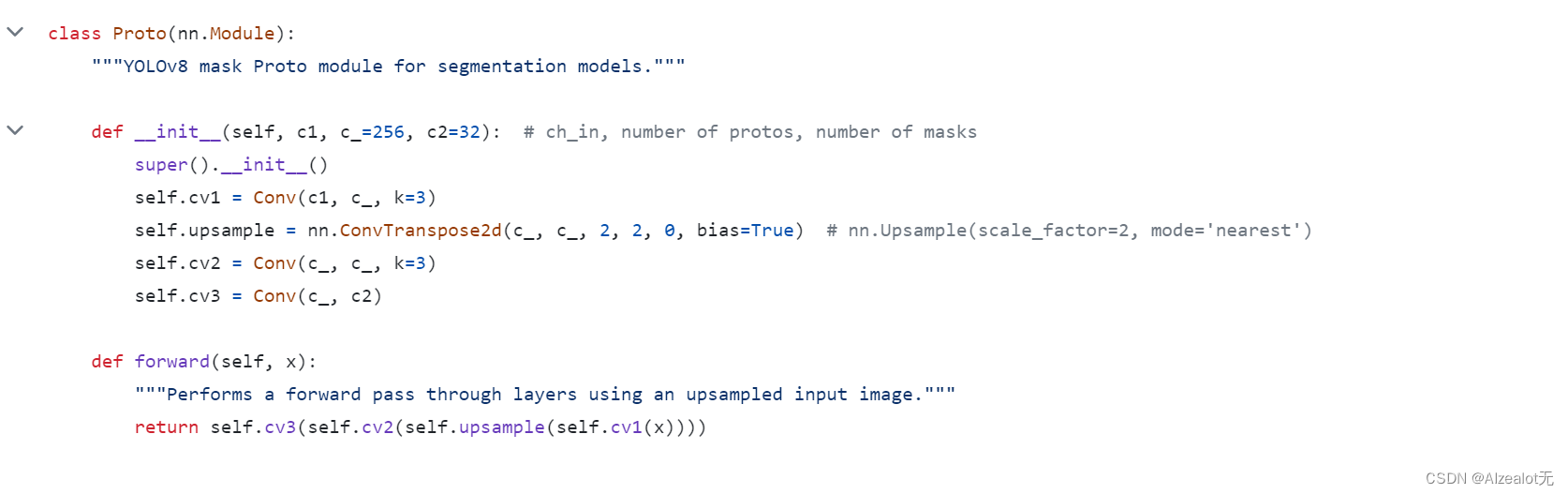
2. 定义YOLOv5模型
```python
class YOLOv5(nn.Module):
def __init__(self, nc=80, anchors=(), ch=(), inference=False): # model, input channels, number of classes
super(YOLOv5, self).__init__()
self.nc = nc # number of classes
self.no = nc + 5 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors per layer
self.grid = [torch.zeros(1)] * self.nl # init grid
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
self.register_buffer('anchors', a) # shape(nl,na,2)
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
self.inference = inference # inference flag
```
3. 定义前向传播函数
```python
def forward(self, x):
self.img_size = x.shape[-2:] # store image size
x = self.forward_backbone(x) # backbone
z = [] # inference output
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.inference == 'tflite':
z.append(x[i].detach().cpu()) # inference tflite
else:
io = x[i].sigmoid()
io[..., 4:] = io[..., 4:] * io[..., 4:].mean(1, keepdim=True) * self.nc # sigmoid obj,class scores
bxy = io[..., :2].sigmoid() * 2. - 0.5 + self.grid[i] # xy
bwh = io[..., 2:4].exp() * self.anchor_grid[i] # wh
xywh = torch.cat((bxy, bwh), -1).view(bs, -1, 4) * self.stride[i] # xywh (center+offset) relative to image size
z.append(xywh.view(bs, -1, self.no), ) # xywhn
return x if self.training else (torch.cat(z, 1), x)
```
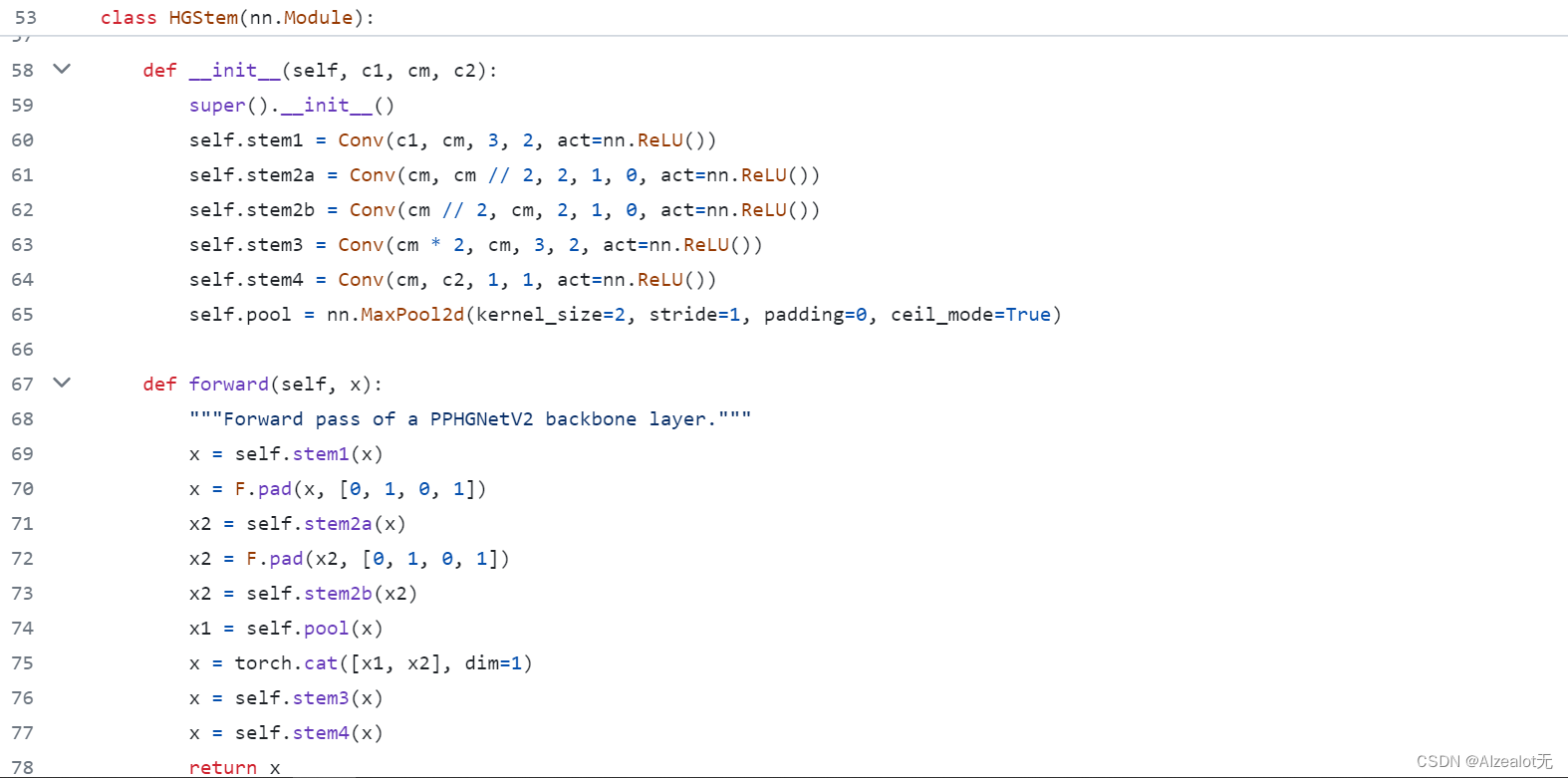
4. 定义后向传播函数
```python
def forward_backbone(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.act1(x)
x = self.pool1(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.layer5(x)
x = self.layer6(x)
x = self.layer7(x)
x = self.layer8(x)
x = self.layer9(x)
return x
```
以上就是yolo.py的代码详解,其中包括了YOLOv5模型的定义和前向传播函数的实现。相关问题如下:
相关问题:
1. YOLOv5模型的输入和输出是什么?
2. YOLOv5模型的训练过程是怎样的?
3. YOLOv5模型中的anchors是什么?

























 732
732











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









