






1、SPI
1、Spi(串行外设接口)是Motorola公司提出的一种同步串行数据传输标准,在很多器件中被广泛应用。
SPI接口经常被称为4线串行总线,以主/从方式工作,数据传输过程由主机初始化。如图1所示,其使用的4条信号线分别为:
1) SCLK:串行时钟,用来同步数据传输,由主机输出;
2) MOSI:主机输出从机输入数据线,通常先传输MSB;
3) MISO:主机输入从机输出数据线,通常先传输LSB;
4) SS/CS:片选线,低电平有效,由主机输出。
在SPI总线上,某一时刻可以出现多个从机,但只能存在一个主机,主机通过片选线来确定要通信的从机。这就要求从机的MISO口具有三态特性,使得该口线在器件未被选通时表现为高阻抗。
在一个SPI时钟周期内, 通过移位寄存器来实现数据传输。
时钟极性设置时钟空闲时的电平,时钟相位设置读取数据和发送数据的时钟沿
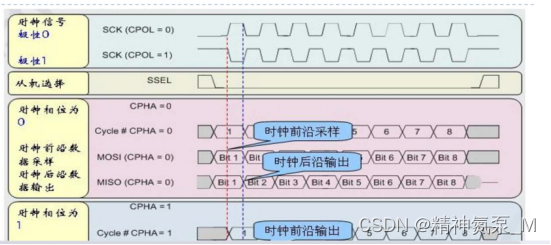
极性:
0:时钟线在空闲状态下是低电平,开始通讯,产生时钟,时钟前沿是上升沿
1:时钟线在空闲状态下是高电平,开始通讯,产生时钟,时钟前沿是下降沿
相位:
0:接收方根据时钟前沿采样(检测数据线电平,知道对方发得数据)
发送方根据时钟后沿输出(根据发送的数据,改变数据线的电平)
1:接收方根据时钟后沿采样(检测数据线电平,知道对方发得数据)
发送根据时钟前沿输出(根据发送的数据,改变数据线的电平)
2、优缺点:
1)支持全双工操作;
2) 操作简单;
3) 数据传输速率较高。
4) 需要占用主机较多的口线(每个从机都需要一根片选线);
5) 只支持单个主机
2、iic
1、I2C接口包括时钟线(SCL)和数据线(SDA)。这两条线都是漏极开路或者集电极开路结构,使用时需要外加上拉电阻,可以挂载多个设备。每个设备都有自己的地址,主机通过不同地址来选中不同的设备。
2、操作:
主机给从机:1、发送开始条件START和从机地址 SCL高 SDA 高变低
2、发送数据
3、发送停止条件STOP结束 SCL高 SDA 低变高
主机读取从机:1、发送开始条件START和从机地址
2、发送要读取的地址
3、读取数据
4、发送停止条件STOP结束
3、优缺点
1)优点
只使用两条信号线;
支持多主机多从机;
有应答机制。
2)缺点
速率比SPI慢
3、uart
UART是一种异步传输接口,不需要时钟线,通过起始位和停止位及波特率进行数据识别
- 接口:UART仅使用两条线TXD和RXD用于数据的发和收
- 数据格式:
1)起始位
数据线空闲状态为高电平,要发送数据时将其拉低一个时钟周期表示起始位。
2)数据位
使用校验位时,数据位可以有5~8位;如果不使用校验位,数据位可以达9位。
3)校验位
奇偶校验,保证包括校验位和数据位在内的所有位中1的个数为奇数或偶数。
4)停止位
为了表示数据包的结束,发送端需要将信号线从低电平变为高电平,并至少保持2个时钟周期
- 优缺点:
优点
只使用两条信号线;
不需要时钟信号;
有校验位进行错误检测;
2)缺点
传输速率比较低
4、can
CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络
一个由CAN总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制硬件的错误检定特性也增强了CAN的抗电磁干扰能力
CAN:
应用层:具体数据
链路层:比特流组成帧
物理层:收发比特流
CPU->CAN-(收发器)外接两根线
两根线电压差为0 代表逻辑1 隐性
电压差为2V代表逻辑0 显性
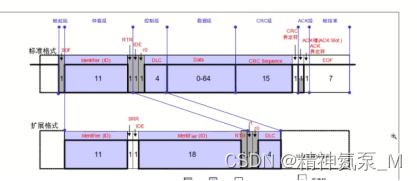
仲裁段:ID号11位,可设置优先级、
控制端:要发送的字节数 最多8字节
数据段:8字节内容
筛选器:1、选择关心的那几位
2、列表模式
CAN总线的特点:
1)可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活。
2)网络上的节点可分成不同的优先级,可以满足不同的实时要求。
3)采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传送数据。
4)可以点对点,一点对多点及全局广播几种传送方式接收数据。
5)直接通信距离最远可达10km(速率4Kbps以下)。
6)通信速率最高可达1MB/s(此时距离最长40m)。
SPI 和I2C这两种通信方式都是短距离的,芯片和芯片之间或者其他元器件如传感器和芯片之间的通信。SPI和IIC是板上通信,IIC有时也会做板间通信,不过距离甚短,不过超过一米,例如一些触摸屏,手机液晶屏那些薄膜排线很多用IIC,I2C能用于替代标准的并行总线,能连接的各种集成电路和功能模块。I2C是多主控总线,所以任何一个设备都能像主控器一样工作,并控制总线。总线上每一个设备都有一个独一无二的地址,根据设备它们自己的能力,它们可以作为发射器或接收器工作。多路微控制器能在同一个I2C总线上共存这两种线属于低速传输。
而UART是应用于两个设备之间的通信,如用单片机做好的设备和计算机的通信。这样的通信可以做长距离的。UART速度比上面两者者快,最高达100K左右,用与计算机与设备或者计算机和计算之间通信,但有效范围不会很长,约10米左右,UART优点是支持面广,程序设计结构很简单,随着USB的发展,UART也逐渐走向下坡。
CAN 通讯距离最大是10 公里(设速率为5Kbps),或最大通信速率为1Mbps(设通信距离为40 米)。
CAN 总线上的节点数可达110 个。通信介质可在双绞线,同轴电缆,光纤中选择。
CAN 采用非破坏性的总线仲裁技术,当多个节点同时发送数据时,优先级低的节点会主动退出发送,高优先级的节点可继续发送,节省总线仲裁时间。
CAN 是多主方式工作,网上的任一节点均可在任意时刻主动地向网络上其他节点发送信息。
CAN 采用报文识别符识别网络上的节点,从而把节点分成不同的优先级,高优先级的节点享有传送报文的优先权。报文是短帧结构,短的传送时间使其受干扰概率低,CAN 有很好的效验机制,这些都保证了CAN 通信的可靠性














 2924
2924











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









