







目录
1. CAN(Controller Area Network 控制器 域 网络)
2. UART(Universal Asychronous Receiver Transmitter)
1. CAN(Controller Area Network 控制器 域 网络)
1.1 CAN简介
异步半双工串行通信协议
1.1.1 总线制
(1)CAN由一对差分对(两条线)CANH和CANL组成
(2)CANH电压比CANL高视为逻辑0(显性电平),否则为逻辑1(隐形电平)
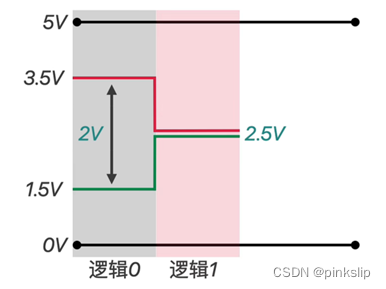
显性电平与阴性电平
(3)多个设备可以连接到同一条CAN上
(4)总线设备通过ID号区分
(5)ID号长度为11位(标准长度)或29位(拓展长度)
1.1.2 CAN2.0b标准
(1)最大速率1Mbps
(2)一组数据称作一帧,分为数据帧和远程帧(不常用),远程帧不传输数据
(用来告诉设备,马上发送数据)
(3)数据帧最多传输8个字节的数据
(4)每一帧都有CRC校验
1.1.3 CAN FD 标准
(1)最大速率可达8Mbps
(2)数据帧最多可传输64字节数据
1.1.4 CAN的层(传输层、数据链路层、物理层)
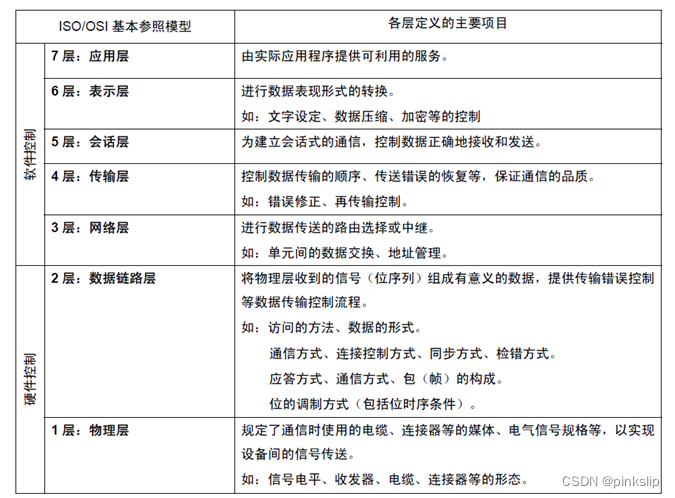
ISO/OSI基本参照模型
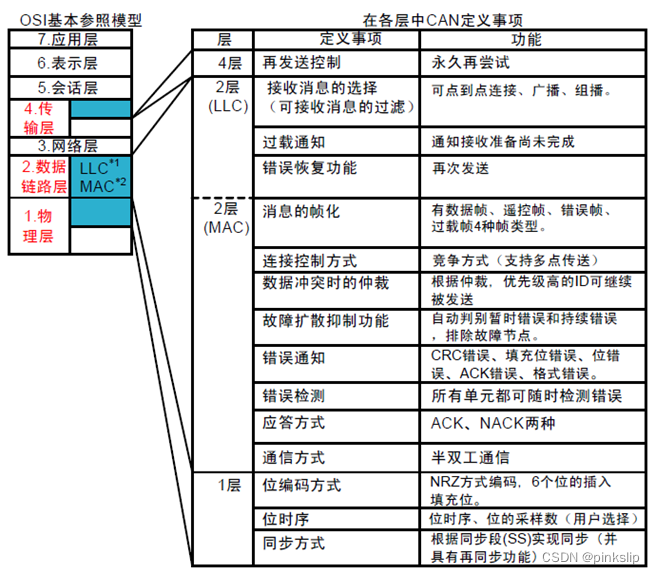
ISO/OSI基本参照模型和CAN协议
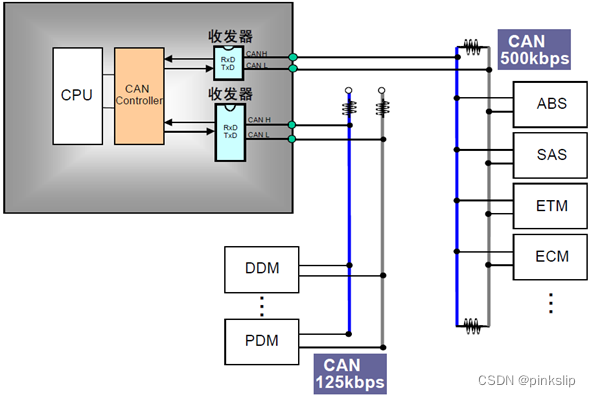
CAN RX/CAN TX需要经过CAN收发器(Transceiver)才能被转换为对应的差分电平(CAN H/CAN L)。
一般CAN差分信号的电压为0~5V,也可以0~3.3V(不建议,兼容性差)
1.1.5 ISO 标准化的CAN 协议
(1)ISO11898
ISO11898 是通信速度为125kbps-1Mbps 的CAN 高速通信标准。
(2)ISO11519
ISO11898 是通信速度为125kbps-1Mbps 的CAN 高速通信标准。
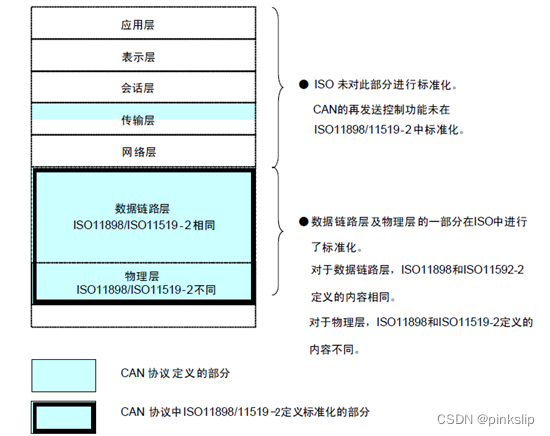
ISO标准化的CAN协议
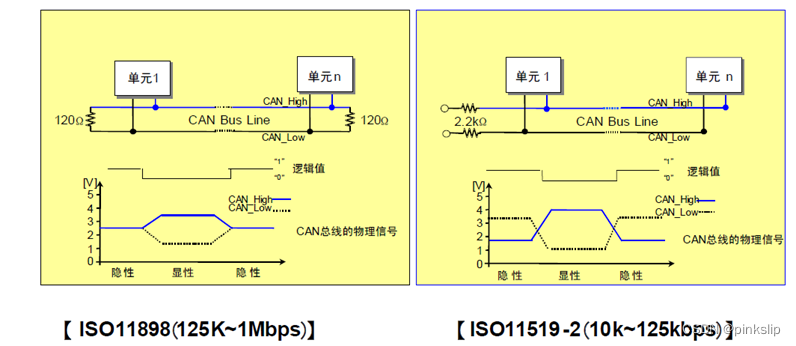
ISO11898 与ISO11519-2 的物理层的规格不同,每种规格需要有专门的驱动IC与之相对应。
1.2 CAN的总线结构
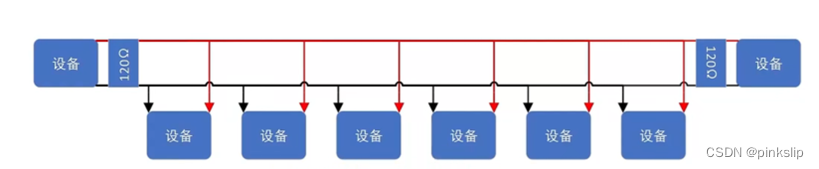
CAN有两个120Ω终端电阻,位于CAN布线两端
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 786
786

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









