






一,前言
网上can通信的开发资料较少,csdn上有一些博客,但要么是用的标准库开发,要么自己偷偷定义一堆函数直接用,各种问题巨多,本文将从很实际的角度指出一些hal库can开发过程中可能遇到的难点,希望后人少踩坑。(这边顺便给华南小虎队的文引一波流)
https://blog.csdn.net/weixin_44793491/article/details/107298426
二,准备工作
首先最重要的就是别忘了买can收发器(淘宝直接搜)!!!!!
我一开始就是不知道买收发器导致浪费了大量时间
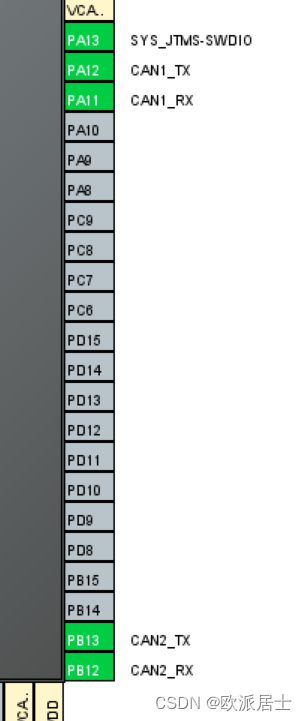
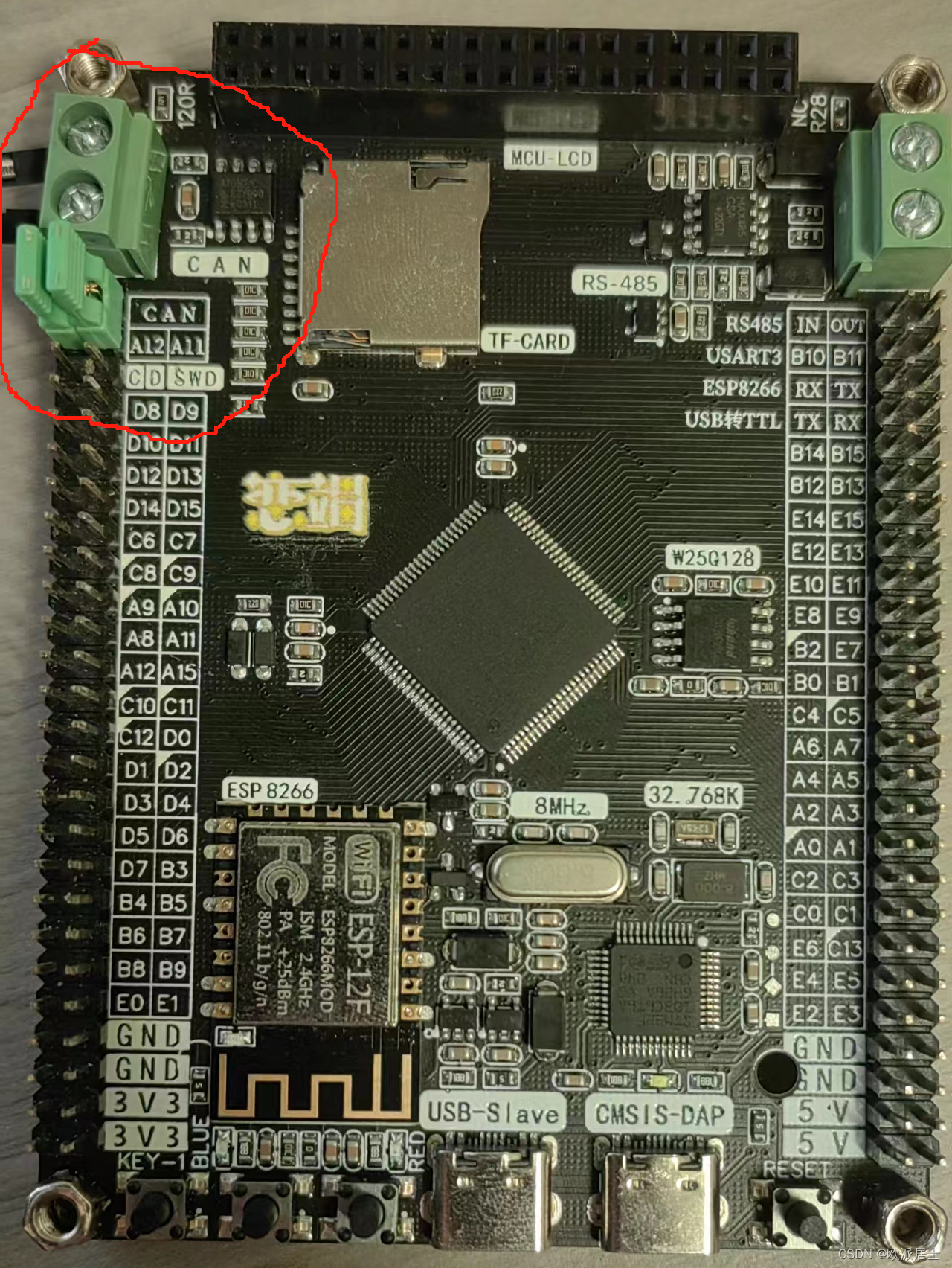
这里举个例子,大家根据自己板子的具体情况购买收发器,我这块f4的板子有两路can,一路是自带can收发器的,即左图中的can1,也就不需要购买(图中红圈为收发器),另一路是不带的,即can2。
对初学者来讲,can通信有三种开发方式,第一种:单板单can的回环模式收发,即只需要一块板,一路can进行回环模式的自收自发,这种情况下准备一块基础的stm32f103c8t6即可;第二种:单板双can的正常模式收发,即一块板,两路can,这种情况下得准备一块stm32f4才够;第三种,双板双can的互发互收,这种情况下准备两块带一路can的板子就行,但建议最好是一样型号的,别问我为什么。。。。。。。。。
三,接线
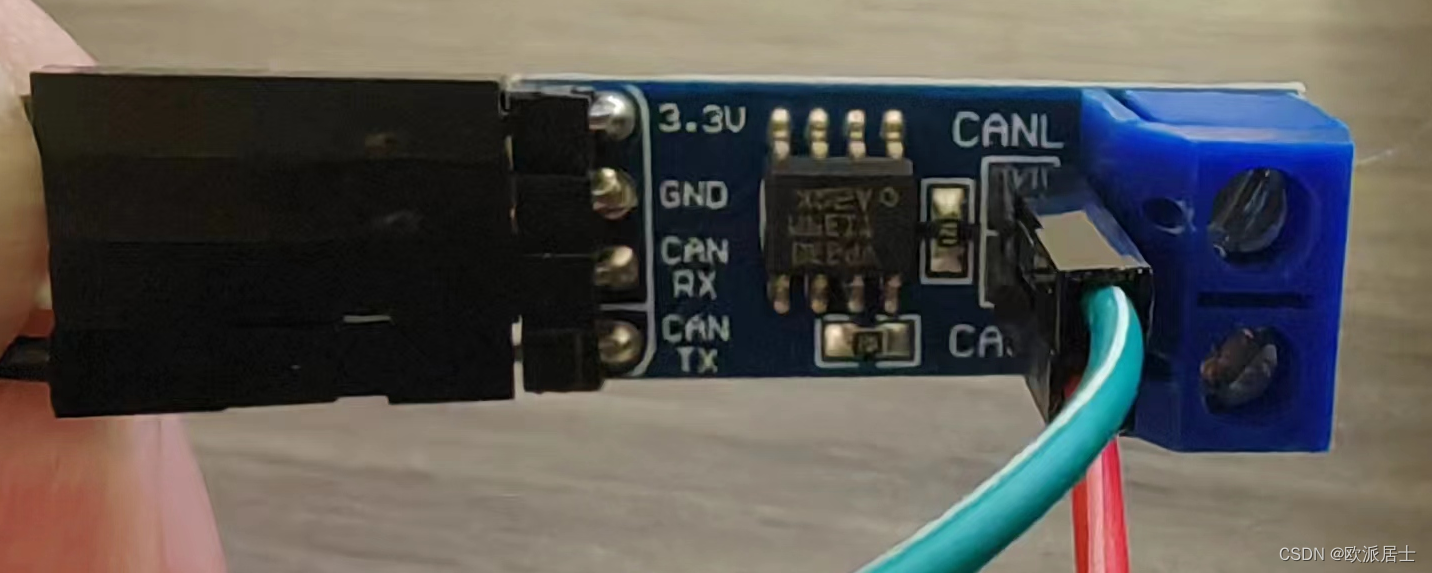
模块上的can_rx对应地接板子上的can_rx,tx也对应地接tx,这点和串口通信有所不同,然后就是两个收发器,CANH接CANH,CANL接CANL。
四,注意事项
1. https://pan.baidu.com/s/1ccY_2qr_rLHp42GgS-bofg?pwd=1os
正点原子开发指南里有can收发范例
2.STM32CubeMX | STM32 HAL库CAN总线收发、中断方式接收示例教程_hal库can收发例程-CSDN博客 这篇的收发报文的格式,和定义函数都比较简洁清晰
3.STM32-F407 CAN的双机通讯_can1_mode_init 500波特率-CSDN博客
这篇说的双机通信代码不能完全一样,报文ID得不同,不然不能正常收发
4.STM32双路Can通信_stm32双can-CSDN博客
这篇是板内双can通信,f4的板子一般两路can,一路主一路从,影响到过滤器的配置
五,代码部分
——板间收发(两块stm32f103c8t6)
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
CAN_RxPacketTypeDef RECE;
CAN_TxPacketTypeDef SEND;
uint16_t TX_test;
uint16_t RX_test; //检测是否成功接收数据
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN_Init();
/* USER CODE BEGIN 2 */
CAN_Init();
CAN_SetTxPacket(&SEND);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(CAN_Transmit(&SEND) != 0)
{TX_test=1;}
HAL_Delay(100);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *canHandle) //重新定义中断回调函数
{
// CAN数据接收
if (canHandle->Instance == hcan.Instance)
{
if (HAL_CAN_GetRxMessage(canHandle, CAN_RX_FIFO0, &RECE2.hdr, RECE2.payload) == HAL_OK) // 获得接收到的数据头和数据
{
HAL_CAN_ActivateNotification(canHandle, CAN_IT_RX_FIFO0_MSG_PENDING); // 再次使能FIFO0接收中断
}
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_13,GPIO_PIN_RESET);
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
can.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.c
* @brief This file provides code for the configuration
* of the CAN instances.
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
CAN_HandleTypeDef hcan;
/* CAN init function */
void MX_CAN_Init(void)
{
/* USER CODE BEGIN CAN_Init 0 */
/* USER CODE END CAN_Init 0 */
/* USER CODE BEGIN CAN_Init 1 */
/* USER CODE END CAN_Init 1 */
hcan.Instance = CAN1;
hcan.Init.Prescaler = 9;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_5TQ;
hcan.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = DISABLE;
hcan.Init.AutoWakeUp = DISABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN_Init 2 */
/* USER CODE END CAN_Init 2 */
}
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */
/* CAN1 clock enable */
__HAL_RCC_CAN1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX
PA12 ------> CAN_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */
}
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN1_CLK_DISABLE();
/**CAN GPIO Configuration
PA11 ------> CAN_RX
PA12 ------> CAN_TX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);
/* CAN1 interrupt Deinit */
HAL_NVIC_DisableIRQ(USB_LP_CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void CAN_Init(void) //功能:can初始化;过滤器配置;can开始;can中断启动
{
CAN_Filter_Config();
HAL_CAN_Start(&hcan);
HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING); // 使能CAN接收中断
}
void CAN_Filter_Config(void) //功能:配置过滤器到&hcan上
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank=14;
if (HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
Error_Handler();
}
}
uint8_t CAN_Transmit(CAN_TxPacketTypeDef* packet) //功能:发送报文
{
if(HAL_CAN_AddTxMessage(&hcan, &packet->hdr, packet->payload, &packet->mailbox) != HAL_OK)
return 1;
return 0;
}
void CAN_SetTxPacket(CAN_TxPacketTypeDef*a) //功能:配置发送报文a的格式
{
a->hdr.StdId = 0x321; // 标准ID
// a->hdr.ExtId = 0x10F01234; // 扩展ID
a->hdr.IDE = CAN_ID_STD; // 标准ID类型
// a->hdr.IDE = CAN_ID_EXT; // 扩展ID类型
a->hdr.DLC = 8; // 数据长度
a->hdr.RTR = CAN_RTR_DATA; // 数据帧
// g_CanTxPacket.hdr.RTR = CAN_RTR_REMOTE; // 远程帧
a->hdr.TransmitGlobalTime = DISABLE;
for(int i = 0; i < 8; i++)
{
a->payload[i] = i; //数据数组(暂时)
}
}
/* USER CODE END 1 */
can.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.h
* @brief This file contains all the function prototypes for
* the can.c file
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CAN_H__
#define __CAN_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
typedef struct
{
uint32_t mailbox;
CAN_TxHeaderTypeDef hdr;
uint8_t payload[8];
}CAN_TxPacketTypeDef;
typedef struct
{
CAN_RxHeaderTypeDef hdr;
uint8_t payload[8];
}CAN_RxPacketTypeDef;
/* USER CODE END Includes */
extern CAN_HandleTypeDef hcan;
/* USER CODE BEGIN Private defines */
void CAN_Init(void);
void CAN_Filter_Config(void);
uint8_t CAN_Transmit(CAN_TxPacketTypeDef* packet);
void CAN_SetTxPacket(CAN_TxPacketTypeDef*a) ;
/* USER CODE END Private defines */
void MX_CAN_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __CAN_H__ */
——板内双can(一块stm43f407)
main.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "can.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
CAN_TxPacketTypeDef SEND1;
CAN_RxPacketTypeDef RECE1;
uint16_t RX_test1;
CAN_TxPacketTypeDef SEND2;
CAN_RxPacketTypeDef RECE2;
uint16_t RX_test2;
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_CAN1_Init();
MX_CAN2_Init();
/* USER CODE BEGIN 2 */
CAN1_Init();
CAN2_Init();
CAN1_SetTxPacket(&SEND1);
CAN2_SetTxPacket(&SEND2);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if(CAN1_Transmit(&SEND1) != 0)
RX_test1=1;
HAL_Delay(500);
for(uint16_t i=0;i<8;i++)
{
SEND2.payload[i]=RECE2.payload[i];
}
if(CAN2_Transmit(&SEND2) != 0)
RX_test2=1;
HAL_Delay(500);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 168;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *canHandle) //重新定义中断回调函数
{
// CAN数据接收
if (canHandle->Instance == hcan1.Instance)
{
if (HAL_CAN_GetRxMessage(canHandle, CAN_RX_FIFO0, &RECE1.hdr, RECE1.payload) == HAL_OK) // 获得接收到的数据头和数据
{
HAL_CAN_ActivateNotification(canHandle, CAN_IT_RX_FIFO0_MSG_PENDING); // 再次使能FIFO0接收中断
}
}
else if (canHandle->Instance == hcan2.Instance)
{
if (HAL_CAN_GetRxMessage(canHandle, CAN_RX_FIFO0, &RECE2.hdr, RECE2.payload) == HAL_OK) // 获得接收到的数据头和数据
{
HAL_CAN_ActivateNotification(canHandle, CAN_IT_RX_FIFO0_MSG_PENDING); // 再次使能FIFO0接收中断
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
can.c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.c
* @brief This file provides code for the configuration
* of the CAN instances.
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "can.h"
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
CAN_HandleTypeDef hcan1;
CAN_HandleTypeDef hcan2;
/* CAN1 init function */
void MX_CAN1_Init(void)
{
/* USER CODE BEGIN CAN1_Init 0 */
/* USER CODE END CAN1_Init 0 */
/* USER CODE BEGIN CAN1_Init 1 */
/* USER CODE END CAN1_Init 1 */
hcan1.Instance = CAN1;
hcan1.Init.Prescaler = 7;
hcan1.Init.Mode = CAN_MODE_NORMAL;
hcan1.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan1.Init.TimeSeg1 = CAN_BS1_5TQ;
hcan1.Init.TimeSeg2 = CAN_BS2_6TQ;
hcan1.Init.TimeTriggeredMode = DISABLE;
hcan1.Init.AutoBusOff = DISABLE;
hcan1.Init.AutoWakeUp = DISABLE;
hcan1.Init.AutoRetransmission = DISABLE;
hcan1.Init.ReceiveFifoLocked = DISABLE;
hcan1.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN1_Init 2 */
/* USER CODE END CAN1_Init 2 */
}
/* CAN2 init function */
void MX_CAN2_Init(void)
{
/* USER CODE BEGIN CAN2_Init 0 */
/* USER CODE END CAN2_Init 0 */
/* USER CODE BEGIN CAN2_Init 1 */
/* USER CODE END CAN2_Init 1 */
hcan2.Instance = CAN2;
hcan2.Init.Prescaler = 7;
hcan2.Init.Mode = CAN_MODE_NORMAL;
hcan2.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan2.Init.TimeSeg1 = CAN_BS1_5TQ;
hcan2.Init.TimeSeg2 = CAN_BS2_6TQ;
hcan2.Init.TimeTriggeredMode = DISABLE;
hcan2.Init.AutoBusOff = DISABLE;
hcan2.Init.AutoWakeUp = DISABLE;
hcan2.Init.AutoRetransmission = DISABLE;
hcan2.Init.ReceiveFifoLocked = DISABLE;
hcan2.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN CAN2_Init 2 */
/* USER CODE END CAN2_Init 2 */
}
static uint32_t HAL_RCC_CAN1_CLK_ENABLED=0;
void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspInit 0 */
/* USER CODE END CAN1_MspInit 0 */
/* CAN1 clock enable */
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOA_CLK_ENABLE();
/**CAN1 GPIO Configuration
PA11 ------> CAN1_RX
PA12 ------> CAN1_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* CAN1 interrupt Init */
HAL_NVIC_SetPriority(CAN1_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspInit 1 */
/* USER CODE END CAN1_MspInit 1 */
}
else if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspInit 0 */
/* USER CODE END CAN2_MspInit 0 */
/* CAN2 clock enable */
__HAL_RCC_CAN2_CLK_ENABLE();
HAL_RCC_CAN1_CLK_ENABLED++;
if(HAL_RCC_CAN1_CLK_ENABLED==1){
__HAL_RCC_CAN1_CLK_ENABLE();
}
__HAL_RCC_GPIOB_CLK_ENABLE();
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_CAN2;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* CAN2 interrupt Init */
HAL_NVIC_SetPriority(CAN2_RX0_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspInit 1 */
/* USER CODE END CAN2_MspInit 1 */
}
}
void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{
if(canHandle->Instance==CAN1)
{
/* USER CODE BEGIN CAN1_MspDeInit 0 */
/* USER CODE END CAN1_MspDeInit 0 */
/* Peripheral clock disable */
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN1 GPIO Configuration
PA11 ------> CAN1_RX
PA12 ------> CAN1_TX
*/
HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);
/* CAN1 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN1_RX0_IRQn);
/* USER CODE BEGIN CAN1_MspDeInit 1 */
/* USER CODE END CAN1_MspDeInit 1 */
}
else if(canHandle->Instance==CAN2)
{
/* USER CODE BEGIN CAN2_MspDeInit 0 */
/* USER CODE END CAN2_MspDeInit 0 */
/* Peripheral clock disable */
__HAL_RCC_CAN2_CLK_DISABLE();
HAL_RCC_CAN1_CLK_ENABLED--;
if(HAL_RCC_CAN1_CLK_ENABLED==0){
__HAL_RCC_CAN1_CLK_DISABLE();
}
/**CAN2 GPIO Configuration
PB12 ------> CAN2_RX
PB13 ------> CAN2_TX
*/
HAL_GPIO_DeInit(GPIOB, GPIO_PIN_12|GPIO_PIN_13);
/* CAN2 interrupt Deinit */
HAL_NVIC_DisableIRQ(CAN2_RX0_IRQn);
/* USER CODE BEGIN CAN2_MspDeInit 1 */
/* USER CODE END CAN2_MspDeInit 1 */
}
}
/* USER CODE BEGIN 1 */
void CAN1_Init(void)
{
CAN1_Filter_Config();
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
}
void CAN2_Init(void)
{
CAN2_Filter_Config();
HAL_CAN_Start(&hcan2);
HAL_CAN_ActivateNotification(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING);
}
void CAN1_Filter_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 0;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
Error_Handler();
}
}
void CAN2_Filter_Config(void)
{
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterBank = 14;
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;
sFilterConfig.FilterIdHigh = 0x0000;
sFilterConfig.FilterIdLow = 0x0000;
sFilterConfig.FilterMaskIdHigh = 0x0000;
sFilterConfig.FilterMaskIdLow = 0x0000;
sFilterConfig.FilterFIFOAssignment = CAN_RX_FIFO0;
sFilterConfig.FilterActivation = ENABLE;
sFilterConfig.SlaveStartFilterBank = 14;
if (HAL_CAN_ConfigFilter(&hcan1, &sFilterConfig) != HAL_OK)
{
/* Filter configuration Error */
Error_Handler();
}
}
void CAN1_SetTxPacket(CAN_TxPacketTypeDef*a)
{
a->hdr.StdId = 0x321; // 标准ID
a->hdr.ExtId = 0x10F01234; //扩展至ID
a->hdr.IDE = CAN_ID_STD; // 标准ID类型
a->hdr.DLC = 8; // 数据长度
a->hdr.RTR = CAN_RTR_DATA; // 数据帧
a->hdr.TransmitGlobalTime = DISABLE;
a->mailbox=CAN_TX_MAILBOX0;
for(int i = 0; i < 8; i++)
{
a->payload[i] = i; //数据数组(暂时)
}
}
void CAN2_SetTxPacket(CAN_TxPacketTypeDef*a)
{
a->hdr.StdId = 0x321; // 标准ID
a->hdr.IDE = CAN_ID_STD; // 标准ID类型
a->hdr.DLC = 8; // 数据长度
a->hdr.RTR = CAN_RTR_DATA; // 数据帧
a->hdr.TransmitGlobalTime = DISABLE;
a->mailbox=CAN_TX_MAILBOX0;
for(int i = 0; i < 8; i++)
{
a->payload[i] = 0; //数据数组(暂时)
}
}
uint8_t CAN1_Transmit(CAN_TxPacketTypeDef* packet)
{
if(HAL_CAN_AddTxMessage(&hcan1, &packet->hdr, packet->payload, &packet->mailbox) != HAL_OK)
return 1;
return 0;
}
uint8_t CAN2_Transmit(CAN_TxPacketTypeDef* packet)
{
if(HAL_CAN_AddTxMessage(&hcan2, &packet->hdr, packet->payload, &packet->mailbox) != HAL_OK)
return 1;
return 0;
}
/* USER CODE END 1 */
can.h
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file can.h
* @brief This file contains all the function prototypes for
* the can.c file
******************************************************************************
* @attention
*
* Copyright (c) 2024 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CAN_H__
#define __CAN_H__
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* USER CODE BEGIN Includes */
typedef struct
{
uint32_t mailbox;
CAN_TxHeaderTypeDef hdr;
uint8_t payload[8];
}CAN_TxPacketTypeDef;
typedef struct
{
CAN_RxHeaderTypeDef hdr;
uint8_t payload[8];
}CAN_RxPacketTypeDef;
/* USER CODE END Includes */
extern CAN_HandleTypeDef hcan1;
extern CAN_HandleTypeDef hcan2;
/* USER CODE BEGIN Private defines */
void CAN1_Init(void);
void CAN2_Init(void);
void CAN1_SetTxPacket(CAN_TxPacketTypeDef*a);
void CAN2_SetTxPacket(CAN_TxPacketTypeDef*a);
void CAN1_SetRxPacket(CAN_RxPacketTypeDef*a);
void CAN2_SetRxPacket(CAN_RxPacketTypeDef*a);
void CAN1_Filter_Config(void);
void CAN2_Filter_Config(void);
uint8_t CAN1_Transmit(CAN_TxPacketTypeDef* packet) ;
uint8_t CAN2_Transmit(CAN_TxPacketTypeDef* packet) ;
/* USER CODE END Private defines */
void MX_CAN1_Init(void);
void MX_CAN2_Init(void);
/* USER CODE BEGIN Prototypes */
/* USER CODE END Prototypes */
#ifdef __cplusplus
}
#endif
#endif /* __CAN_H__ */















 7046
7046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









