






0.建模
控制前,需要对系统建模
我们以最简单的倒立摆为例:
a.特点+目标+原理
特点:非线性、高阶次、多变量;
目标:通过给小车底座加力 F(控制量),使小车停留在预定的位置,并使摆杆不倒下,即不超过预先定义的竖直偏离角度范围。
原理:小车位置编码器将小车的位移和速度信号反馈给运动控制卡,角度编码器将摆角的角度、角速度信号反馈给运动控制卡。计算机从运动控制卡中读取实时反馈数据,确定小车向哪个方向移动、移动速度、加速度等,产生相应的控制量 F
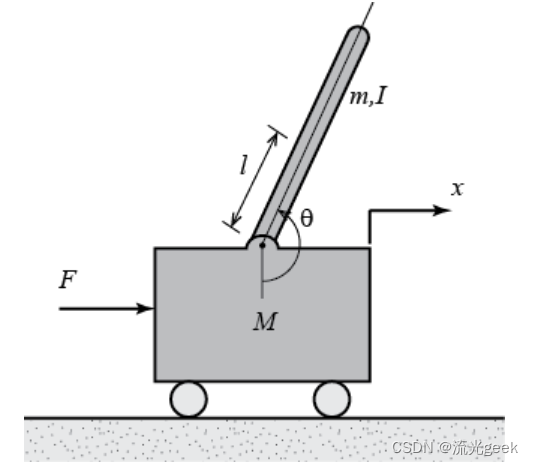
b.系统变量+系统受力分析

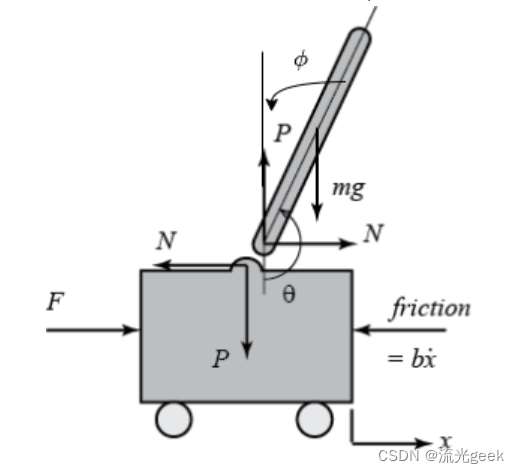
根据所取变量,一种取钝角θ为变量建立系统方程组,另一种以锐角ϕ为变量建立系统方程组
我们以锐角ϕ为变量建立系统模型,这里的ϕ为 π − θ,刚体绕定轴转动动力学方程需要规定正方向,一般取逆时针方向为正方向:

系统模型建立完毕(注意,可以选取钝角θ来建立,或者取顺时针为正方向建立)
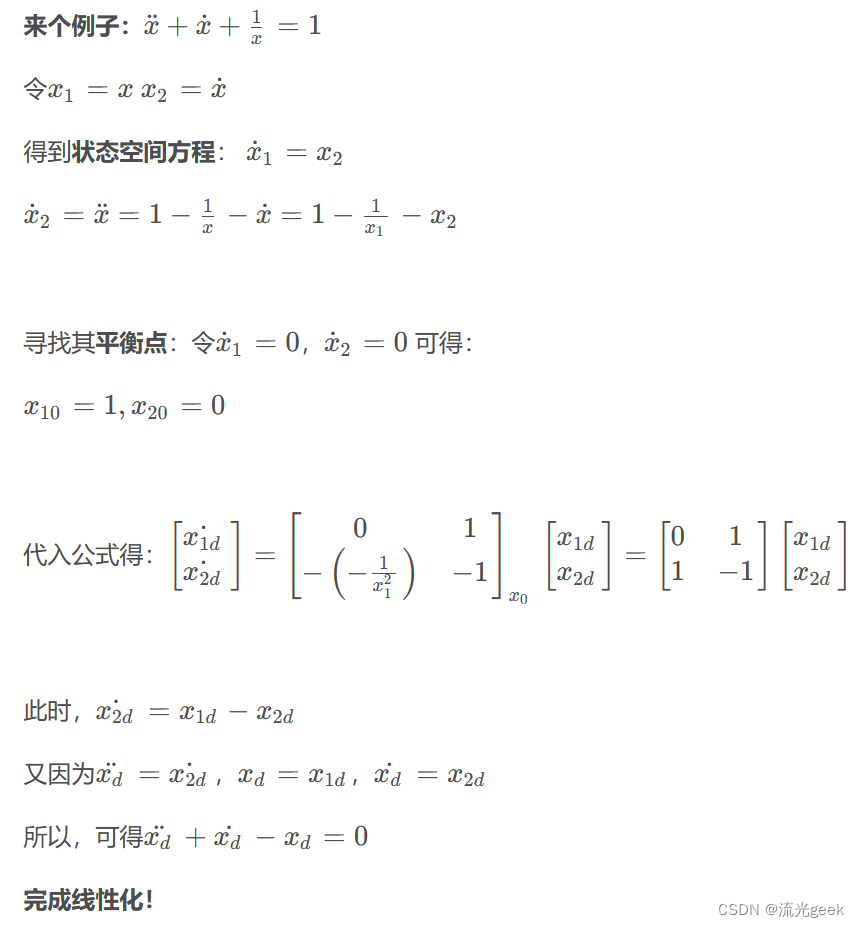
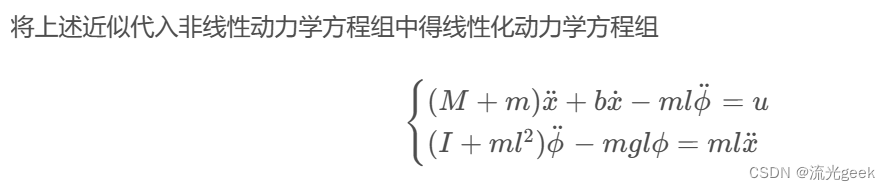
c.动力学方程雅可比线性化
雅可比矩阵是一种线性化工具,用来近似描述非线性系统在其邻域内的行为。在机器人学和控制理论中,这种方法特别有用,它允许我们通过线性化来简化对系统的分析,如稳定性、能控性的分析
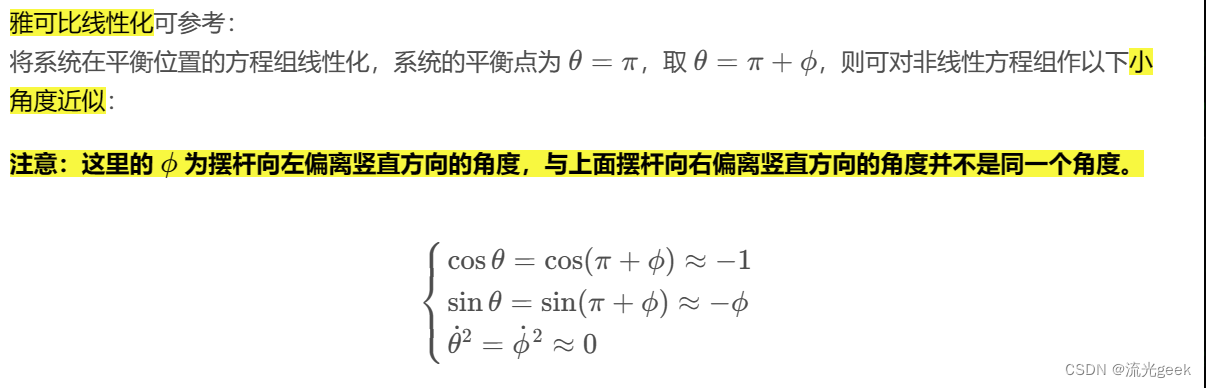
对于倒立摆:
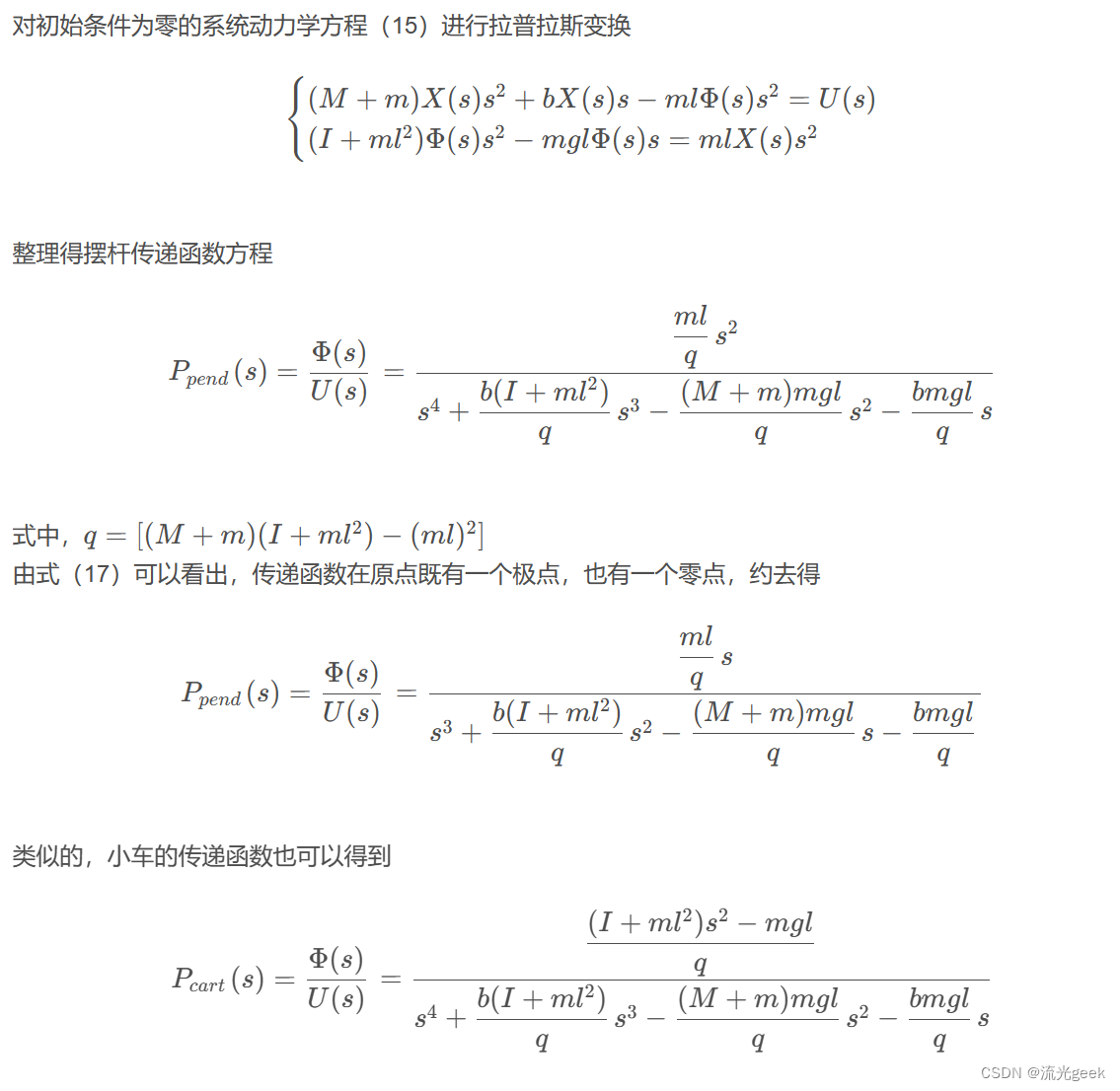
d.传递函数&状态空间
传递函数:传递函数是经典控制理论的工具,只能用于SISO和LTI系统,它是控制系统在复数域的数学模型
状态空间:状态空间模型属于现代控制理论,对SISO和MIMO、LTI和非线性或时变系统都适用,它是描述动态系统的另一种数学模型
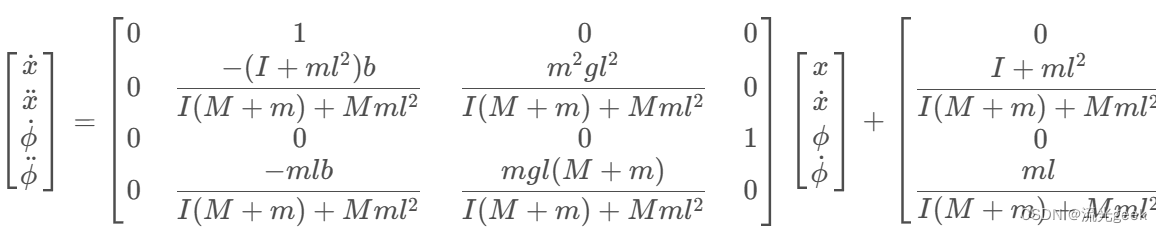
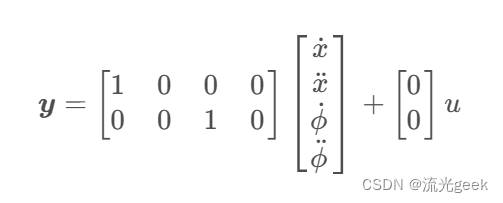
matlab for 状态空间方程:
M = .5;
m = 0.2;
b = 0.1;
I = 0.006;
g = 9.8;
l = 0.3;
p = I*(M+m)+M*m*l^2; %denominator for the A and B matrices
A = [0 1 0 0;
0 -(I+m*l^2)*b/p (m^2*g*l^2)/p 0;
0 0 0 1;
0 -(m*l*b)/p m*g*l*(M+m)/p 0];
B = [ 0;
(I+m*l^2)/p;
0;
m*l/p];
C = [1 0 0 0;
0 0 1 0];
D = [0;
0];
states = {'x' 'x_dot' 'phi' 'phi_dot'};
inputs = {'u'};
outputs = {'x'; 'phi'};
sys_ss = ss(A,B,C,D,'statename',states,'inputname',inputs,'outputname',outputs)
1.LQR for 倒立摆(python)
LQR:
state-x,action-u

(目标状态已知)
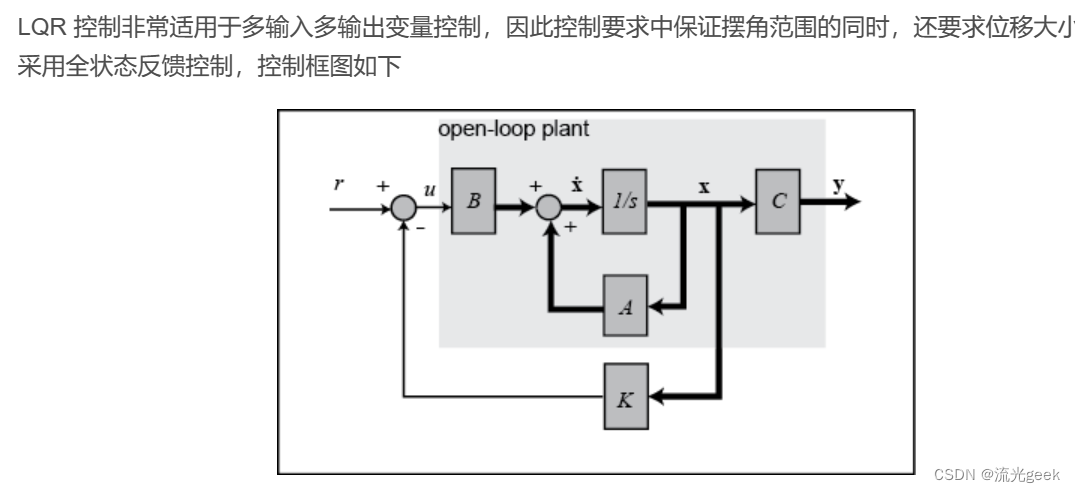
控制theory:R和Q矩阵分别表示在最优化的代价函数中控制输入和误差的相对权重,Q,R矩阵也是cost function的一部分;A,B,C,D矩阵(空间状态方程模型):A 是系统的状态矩阵,B 是系统的控制输入矩阵,C 是系统的输出矩阵,D 是系统的直接传递矩阵
直接目标:需要确定状态反馈矩阵(向量)K
系统变量:M=1 m=0.3(g取9.8) L=2
def main():模拟展示倒立摆的控制和运动过程,x0 是系统初始状态的数组,包含了小车的位置(x坐标)和倒立摆的角度(theta)等等
杆的位移𝑥1 - 初始值为 0.0
杆的速度𝑥2- 初始值为 0.0
杆的角度𝑥3 - 初始值为 0.3,这意味着杆在初始时稍微偏离直立状态。
杆的角速度𝑥4 - 初始值为 0.0
time设置为0,表示模拟时间的起点。sim_time是预定的总模拟时间,delta_t 是每次模拟时间步长
当模拟时间time小于sim_time时,持续执行循环,time += delta_t;每次迭代,时间time增加一个delta_t,u = lqr_control(x)计算控制输入u,通常使用线性二次调节(LQR)控制算法,根据当前系统状态x来确定。x = simulation(x, u):根据当前状态x和控制输入u,执行一次模拟步骤,更新系统状态x
def get_model_matrix():计算出A,B矩阵,为倒立摆系统提供一个状态空间模型,状态矩阵A 定义了系统状态随时间的变化。对于一个简单的倒立摆,控制输入矩阵 B 定义了控制输入 u(在这个例子中是控制力矩)如何影响系统的状态(无C,D,在这个例子中,我们不关注输出)
def simulation(x, u):计算下一个状态x
def solve_DARE(A, B, Q, R, maxiter=150, eps=0.01):迭代法计算Pn直到收敛,解出P
def dlqr(A, B, Q, R):解出P和增益矩阵K以及特征值
def lqr_control(x):计算LQR控制器的控制输入 u (u=−K⋅x),用于倒立摆系统(dlqr函数,准确地说是solve_DARE函数首先求解出离散时间代数Riccati方程以获取状态反馈增益矩阵 K)
import math
import time
import matplotlib.pyplot as plt
import numpy as np
from numpy.linalg import inv, eig
# Model parameters
l_bar = 2.0 # length of bar
M = 1.0 # [kg]
m = 0.3 # [kg]
g = 9.8 # [m/s^2]
nx = 4 # number of state
nu = 1 # number of input
Q = np.diag([0.0, 1.0, 1.0, 0.0]) # state cost matrix
R = np.diag([0.01]) # input cost matrix
delta_t = 0.1 # time tick [s]
sim_time = 5.0 # simulation time [s]
show_animation = True
def main():
x0 = np.array([
[0.0],
[0.0],
[0.3],
[0.0]
])
x = np.copy(x0)
time = 0.0
while sim_time > time:
time += delta_t
# calc control input
u = lqr_control(x)
# simulate inverted pendulum cart
x = simulation(x, u)
if show_animation:
plt.clf()
px = float(x[0, 0])
theta = float(x[2, 0])
plot_cart(px, theta)
plt.xlim([-5.0, 2.0])
plt.pause(0.001)
print("Finish")
print(f"x={float(x[0, 0]):.2f} [m] , theta={math.degrees(x[2, 0]):.2f} [deg]")
if show_animation:
plt.show()
def simulation(x, u):
A, B = get_model_matrix()
x = A @ x + B @ u
return x
def solve_DARE(A, B, Q, R, maxiter=150, eps=0.01):
"""
Solve a discrete time_Algebraic Riccati equation (DARE)
"""
P = Q
for i in range(maxiter):
Pn = A.T @ P @ A - A.T @ P @ B @ \
inv(R + B.T @ P @ B) @ B.T @ P @ A + Q
if (abs(Pn - P)).max() < eps:
break
P = Pn
return Pn
def dlqr(A, B, Q, R):
"""
Solve the discrete time lqr controller.
x[k+1] = A x[k] + B u[k]
cost = sum x[k].T*Q*x[k] + u[k].T*R*u[k]
# ref Bertsekas, p.151
"""
# first, try to solve the ricatti equation
P = solve_DARE(A, B, Q, R)
# compute the LQR gain
K = inv(B.T @ P @ B + R) @ (B.T @ P @ A)
eigVals, eigVecs = eig(A - B @ K)
return K, P, eigVals
def lqr_control(x):
A, B = get_model_matrix()
start = time.time()
K, _, _ = dlqr(A, B, Q, R)
u = -K @ x
elapsed_time = time.time() - start
print(f"calc time:{elapsed_time:.6f} [sec]")
return u
def get_numpy_array_from_matrix(x):
"""
get build-in list from matrix
"""
return np.array(x).flatten()
def get_model_matrix():
A = np.array([
[0.0, 1.0, 0.0, 0.0],
[0.0, 0.0, m * g / M, 0.0],
[0.0, 0.0, 0.0, 1.0],
[0.0, 0.0, g * (M + m) / (l_bar * M), 0.0]
])
A = np.eye(nx) + delta_t * A
B = np.array([
[0.0],
[1.0 / M],
[0.0],
[1.0 / (l_bar * M)]
])
B = delta_t * B
return A, B
def flatten(a):
return np.array(a).flatten()
def plot_cart(xt, theta):
cart_w = 1.0
cart_h = 0.5
radius = 0.1
cx = np.array([-cart_w / 2.0, cart_w / 2.0, cart_w /
2.0, -cart_w / 2.0, -cart_w / 2.0])
cy = np.array([0.0, 0.0, cart_h, cart_h, 0.0])
cy += radius * 2.0
cx = cx + xt
bx = np.array([0.0, l_bar * math.sin(-theta)])
bx += xt
by = np.array([cart_h, l_bar * math.cos(-theta) + cart_h])
by += radius * 2.0
angles = np.arange(0.0, math.pi * 2.0, math.radians(3.0))
ox = np.array([radius * math.cos(a) for a in angles])
oy = np.array([radius * math.sin(a) for a in angles])
rwx = np.copy(ox) + cart_w / 4.0 + xt
rwy = np.copy(oy) + radius
lwx = np.copy(ox) - cart_w / 4.0 + xt
lwy = np.copy(oy) + radius
wx = np.copy(ox) + bx[-1]
wy = np.copy(oy) + by[-1]
plt.plot(flatten(cx), flatten(cy), "-b")
plt.plot(flatten(bx), flatten(by), "-k")
plt.plot(flatten(rwx), flatten(rwy), "-k")
plt.plot(flatten(lwx), flatten(lwy), "-k")
plt.plot(flatten(wx), flatten(wy), "-k")
plt.title(f"x: {xt:.2f} , theta: {math.degrees(theta):.2f}")
# for stopping simulation with the esc key.
plt.gcf().canvas.mpl_connect(
'key_release_event',
lambda event: [exit(0) if event.key == 'escape' else None])
plt.axis("equal")
if __name__ == '__main__':
main()注:此例未设置目标状态,但在使得cost function最小的过程中,为使状态最小,最终是杆直立状态。x-状态(的)成本,u-输入(的)成本

result(最终系统稳定即达到了杆直立,杆的角度接近或等于 0°):
2.ILQR for 倒立摆(python)
3.MPC for 四旋翼无人机(python)
4.ILQR for panda robot arm(python+pybullet+pinocchio)
5.c++从零实现mpc
















 3412
3412

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









