







1.1 周期信号与非周期信号
f
(
k
)
=
sin
(
β
k
)
=
s
i
n
(
β
k
+
2
m
π
)
=
s
i
n
[
β
(
k
+
m
2
π
β
]
=
s
i
n
[
β
(
k
+
m
N
)
]
,
m
=
0
,
±
1
,
±
2
,
.
.
.
;
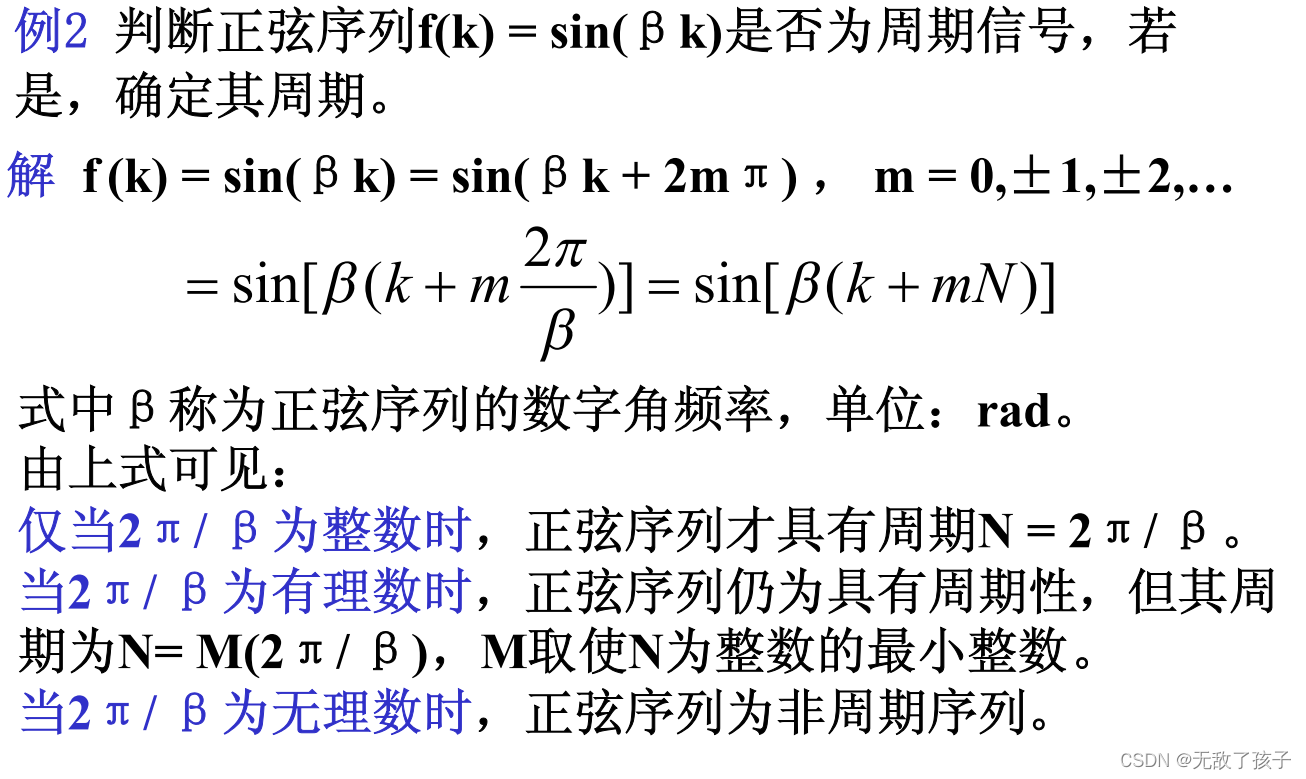
\begin{split} f(k) &= \sin(\beta k) = sin(\beta k+2m\pi)\\ & = sin[\beta (k+m\frac{2\pi}{\beta}]\\ & = sin[\beta (k+mN)],m = 0,\pm1,\pm2,^{...}; \end{split}
f(k)=sin(βk)=sin(βk+2mπ)=sin[β(k+mβ2π]=sin[β(k+mN)],m=0,±1,±2,...;
当
2
π
β
\frac{2\pi}{\beta}
β2π为整数时,为周期序列,
注: 2 π β = N M 时, N 和 M 均为无公因子的整数,其周期 N = M π β \frac{2\pi}{\beta} = \frac{N}{M}时,N和M均为无公因子的整数,其周期N= M\frac{\pi}{\beta} β2π=MN时,N和M均为无公因子的整数,其周期N=Mβπ。
当
2
π
β
为无理数时,该序列不具备周期性。
\frac{2\pi}{\beta}为无理数时,该序列不具备周期性。
β2π为无理数时,该序列不具备周期性。
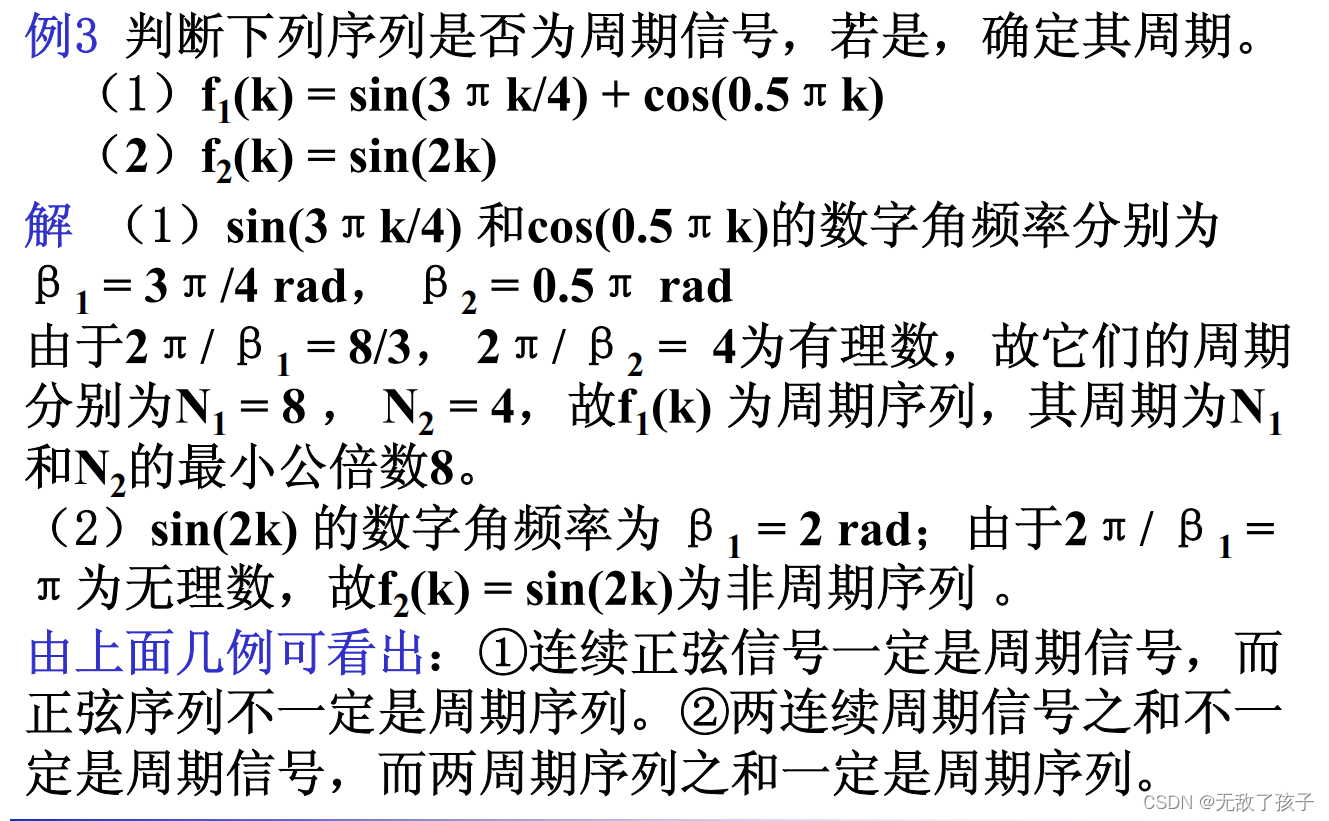
例题:

1.2 信号的基本运算
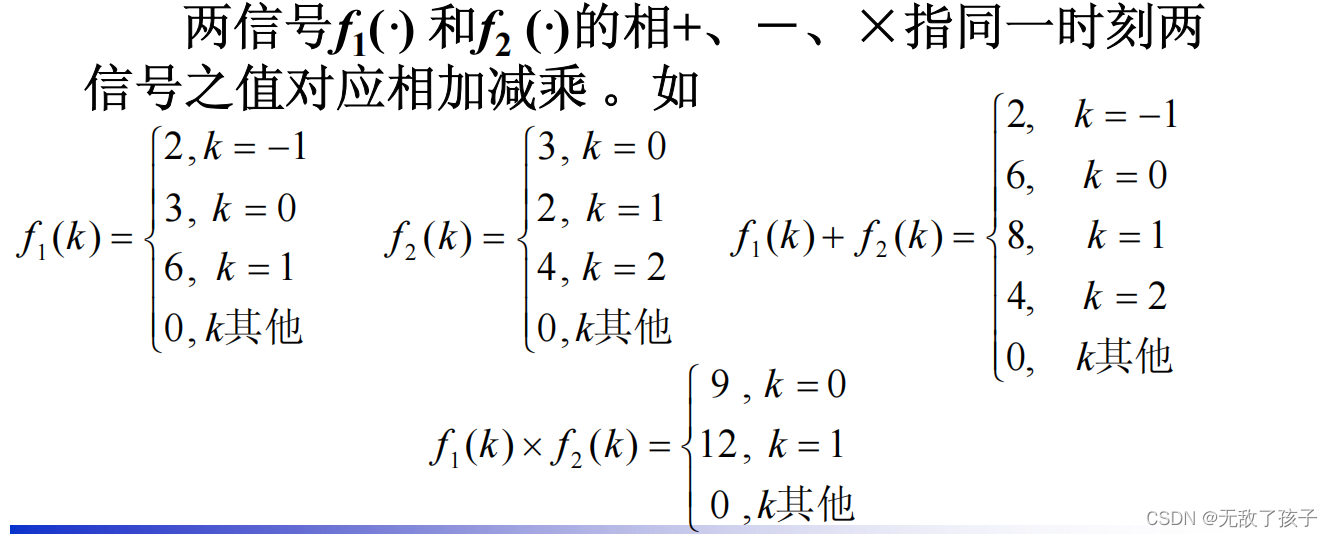
1.2.1 加法和乘法
加减乘运算只需要找准对应的区间,进行正常计算即可。
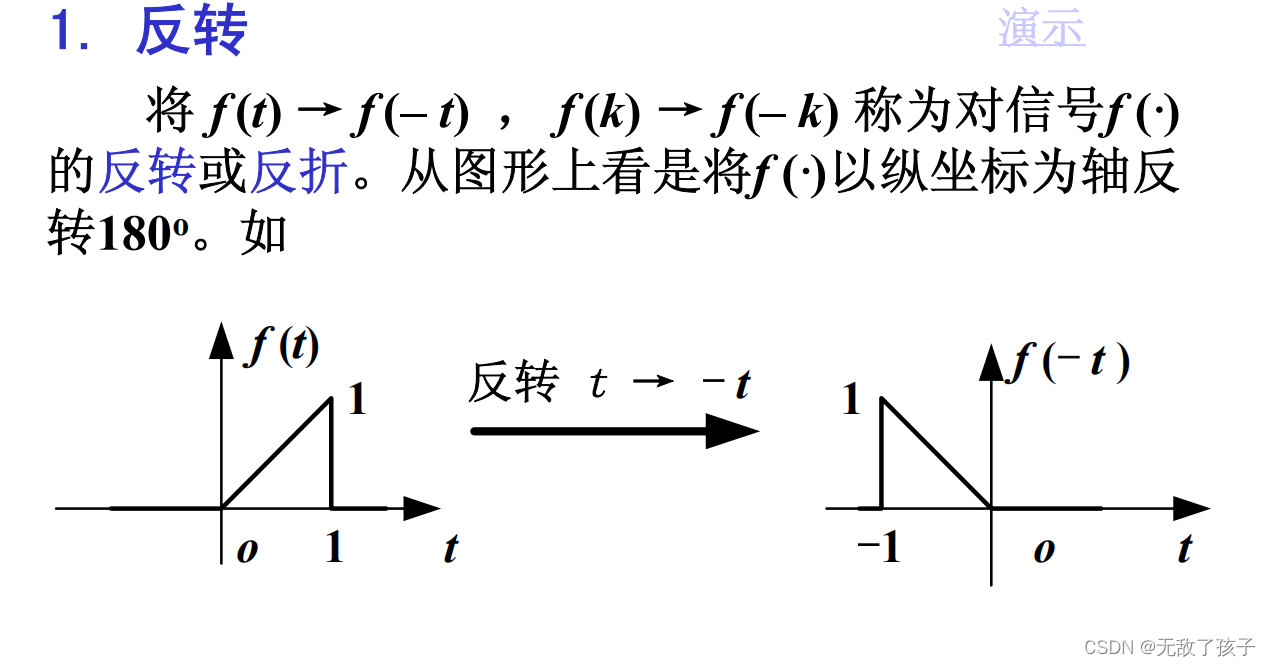
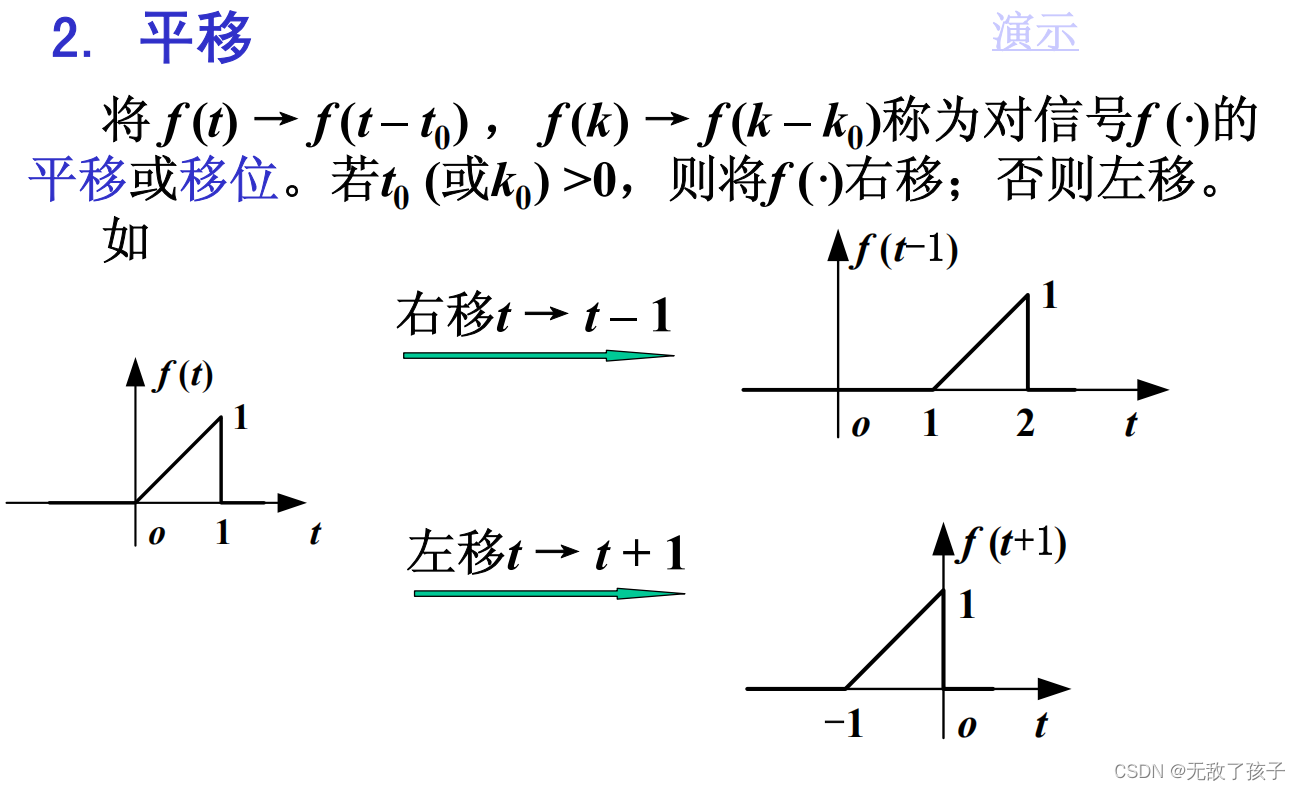
1.2.2 反转和平移
反转
平移,左加右减
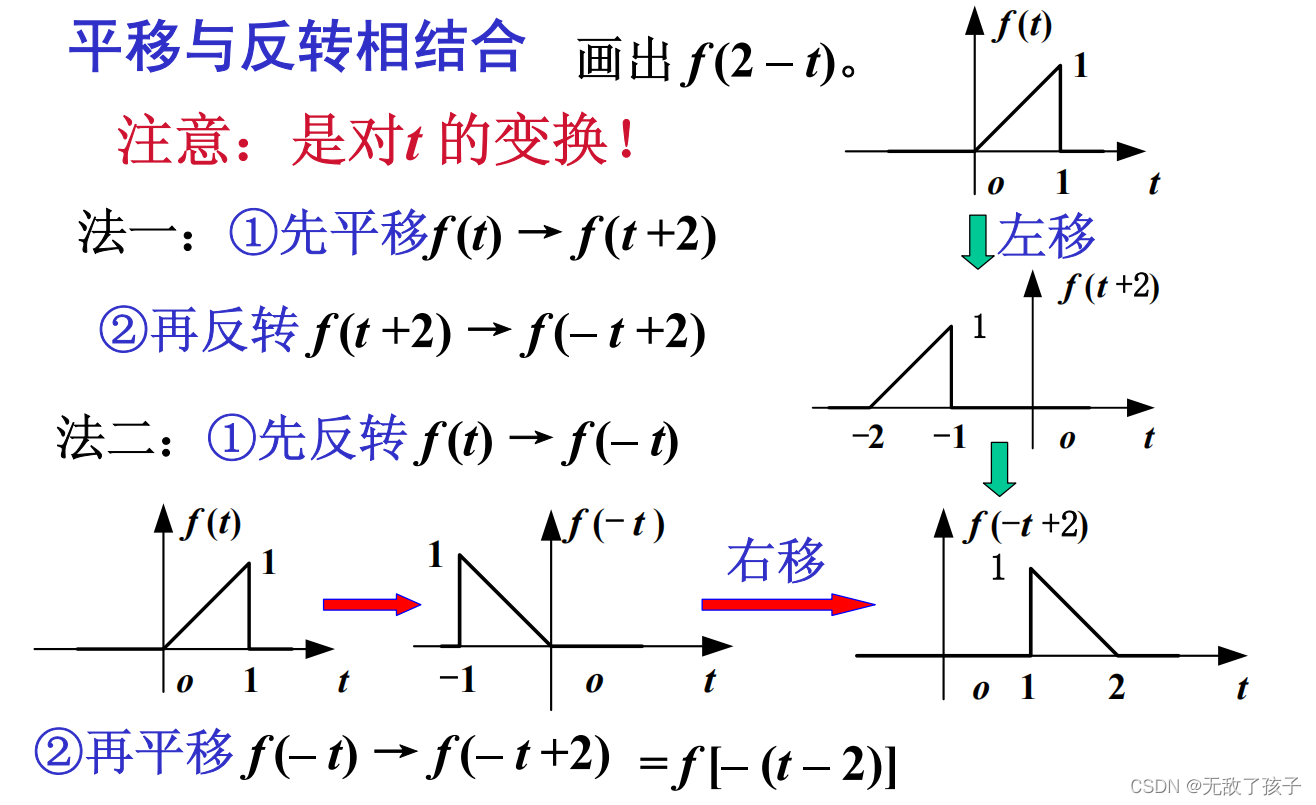
平移和反转相结合,最好先平移再反转,即下列法一,这样做就不会存在平移的符号改变。
如果先反转后平移,由于反转后的自变量为-t或者-k,故平移方向与前述相反。
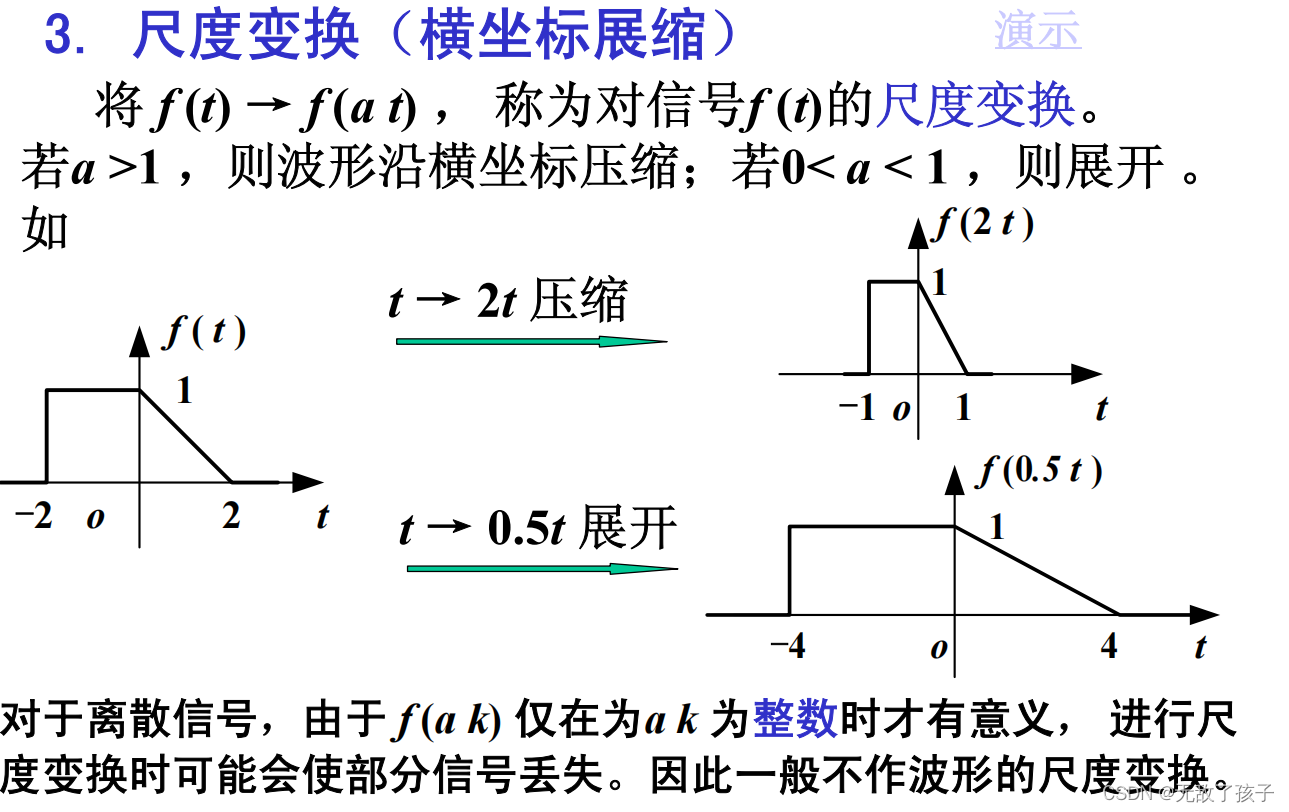
1.2.3 尺度变换(横坐标展缩)
在后续的章节中这几种变换也会经常出现,偶尔会多个变换同时出现)
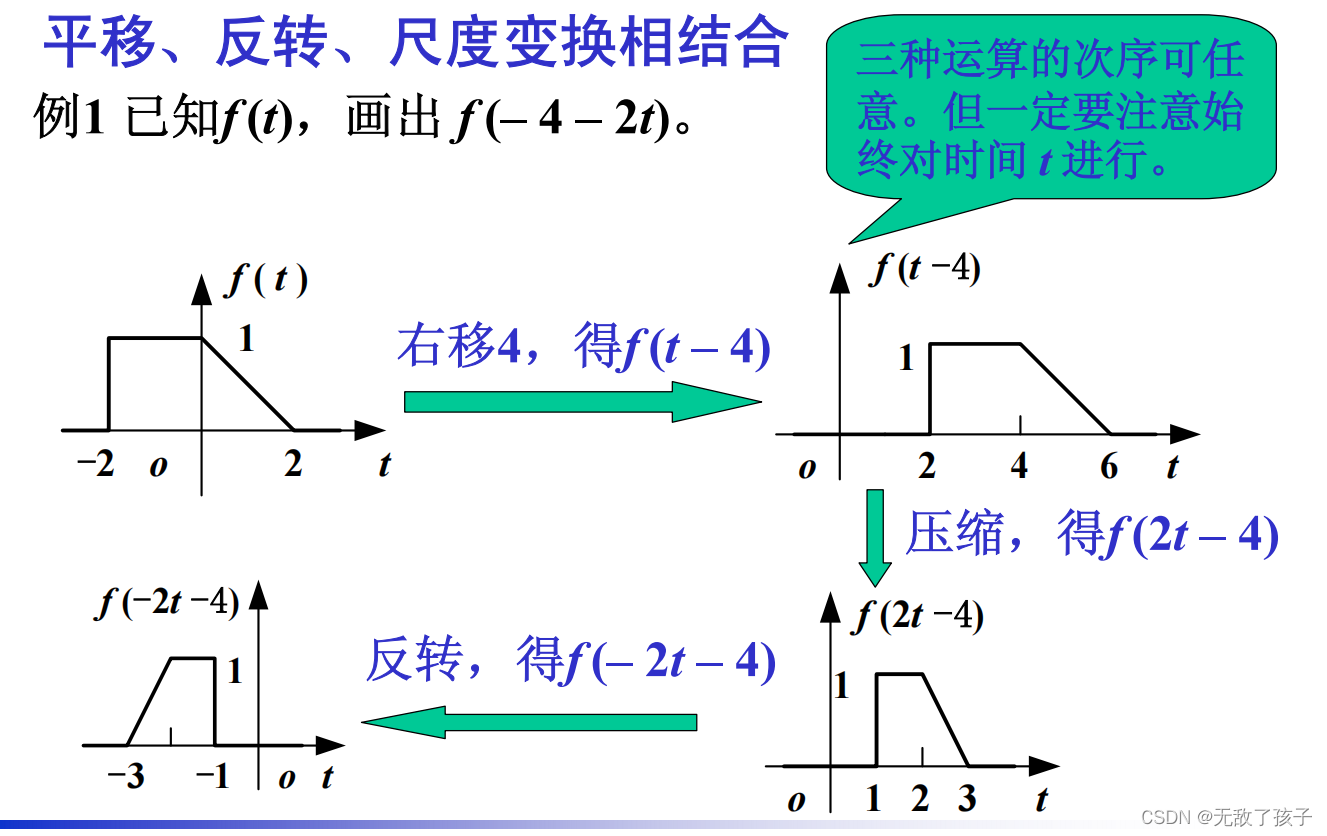
个人推荐先平移再反转最后尺度(其实感觉先平移,之后反转和压缩谁先谁后都差不多)
1.3 阶跃函数和冲激函数
在后续的章节我们会不断的用到这两个函数,(又称奇异函数)
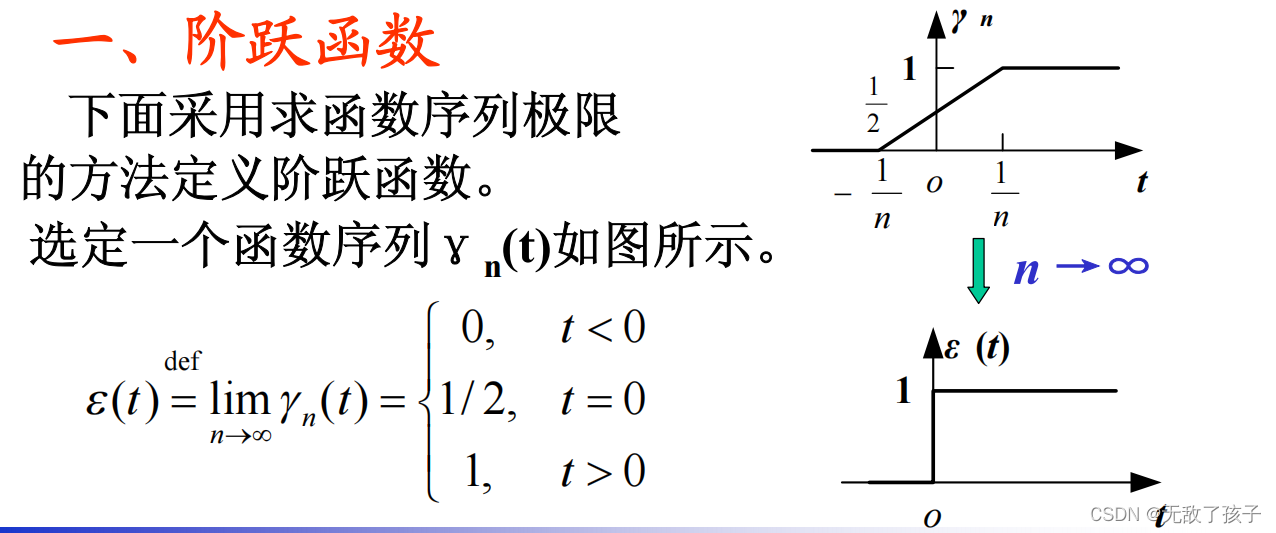
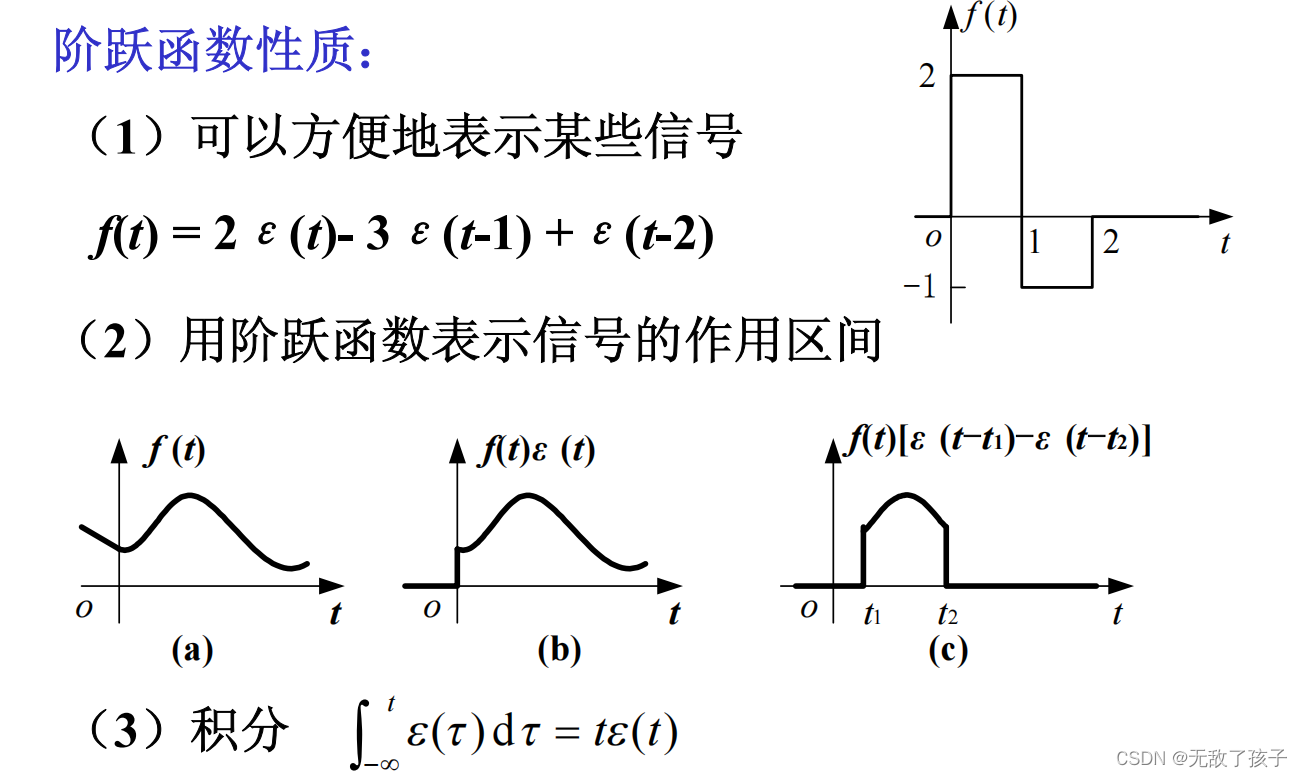
1.3.1 阶跃函数
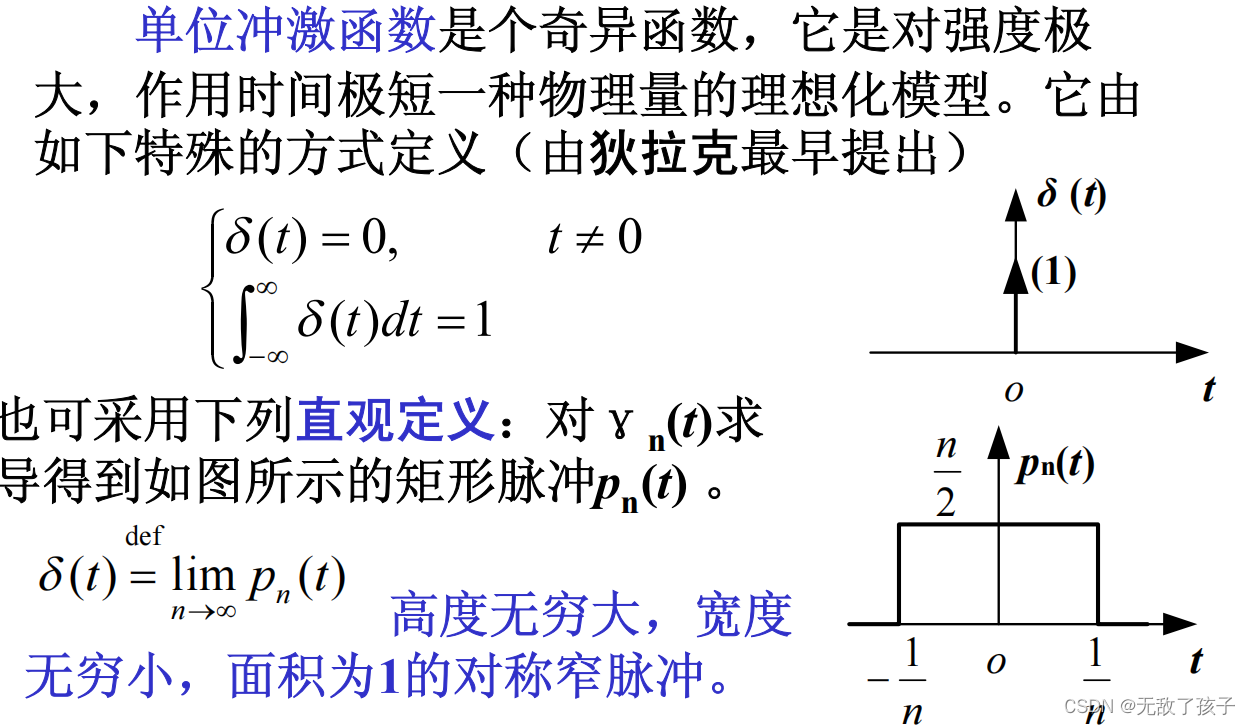
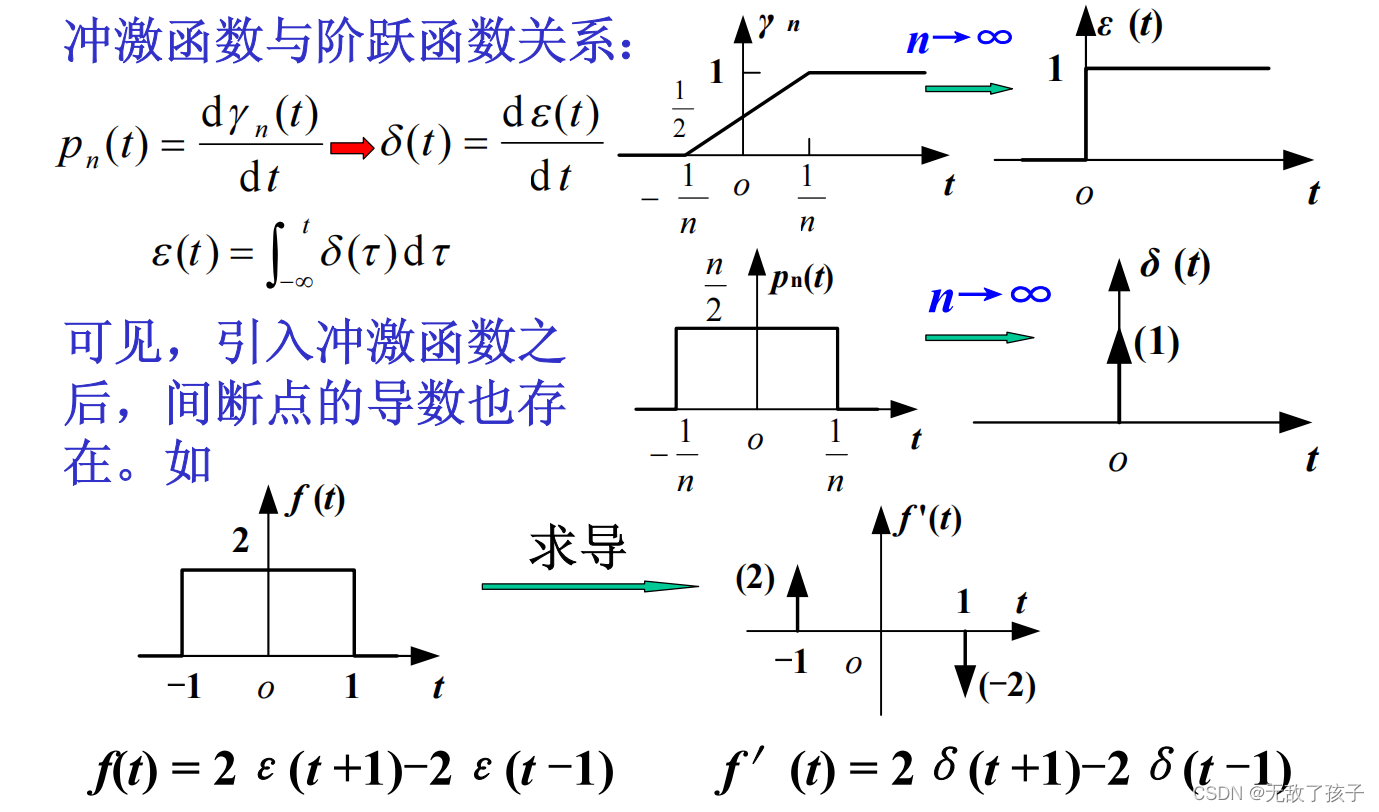
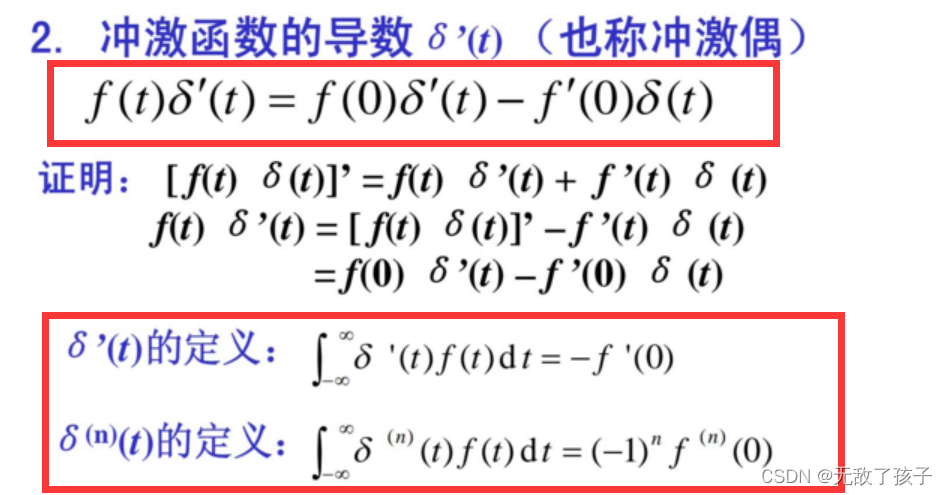
1.3.2 冲激函数
简单来说就是函数 δ ( t ) 只有当 t = 0 时才有值 = 1 , t ≠ 0 时,值 = 0 。 \delta(t)只有当t = 0时才有值 = 1,t\neq0时,值 = 0。 δ(t)只有当t=0时才有值=1,t=0时,值=0。
1.3.3 广义函数的定义
冲激函数的取样性


冲激偶
尺度变化
反应奇偶性

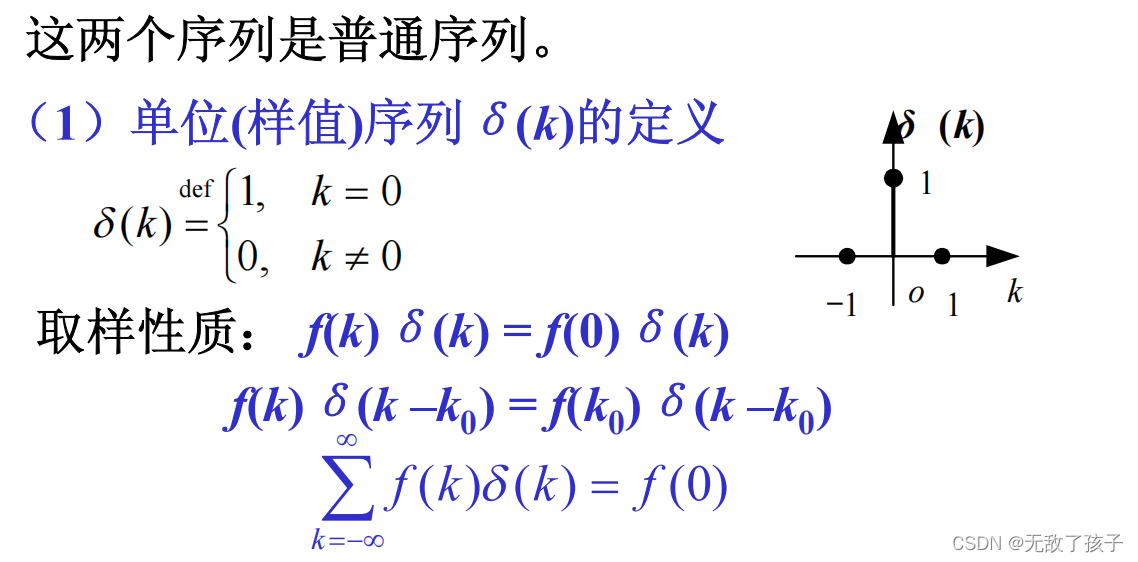
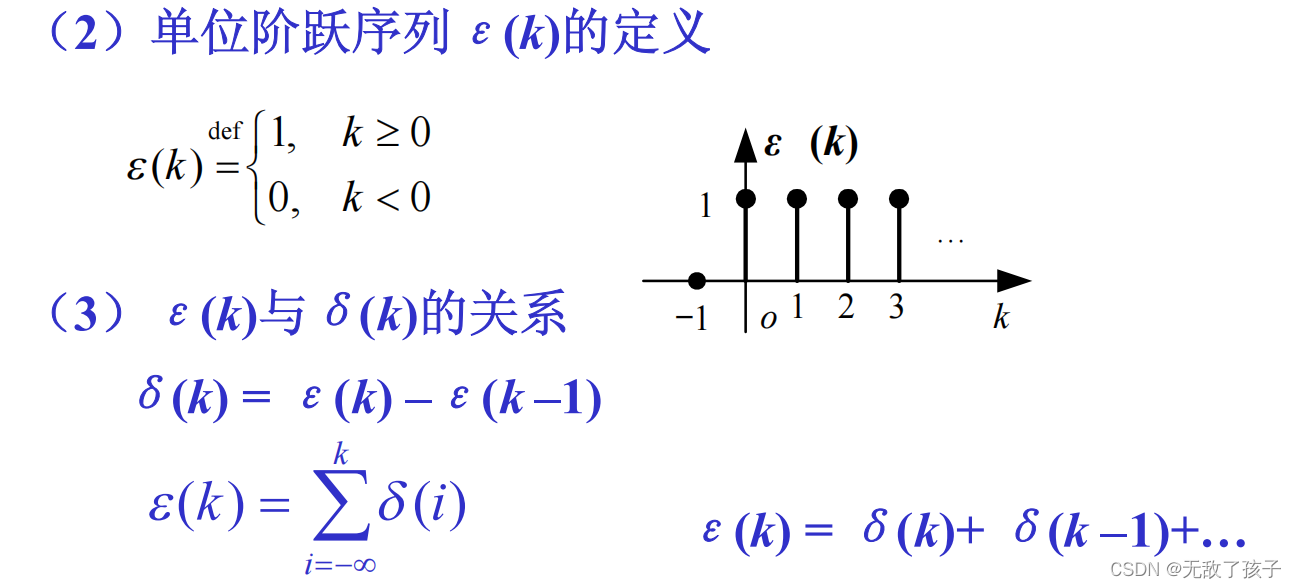
1.4 序列
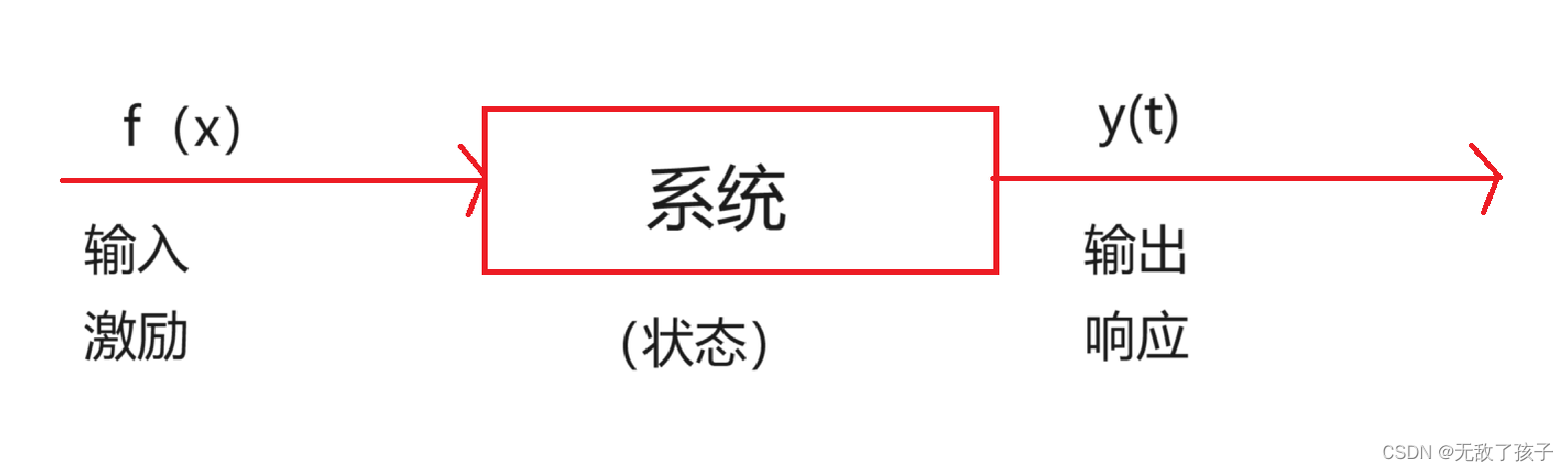
系统的描述
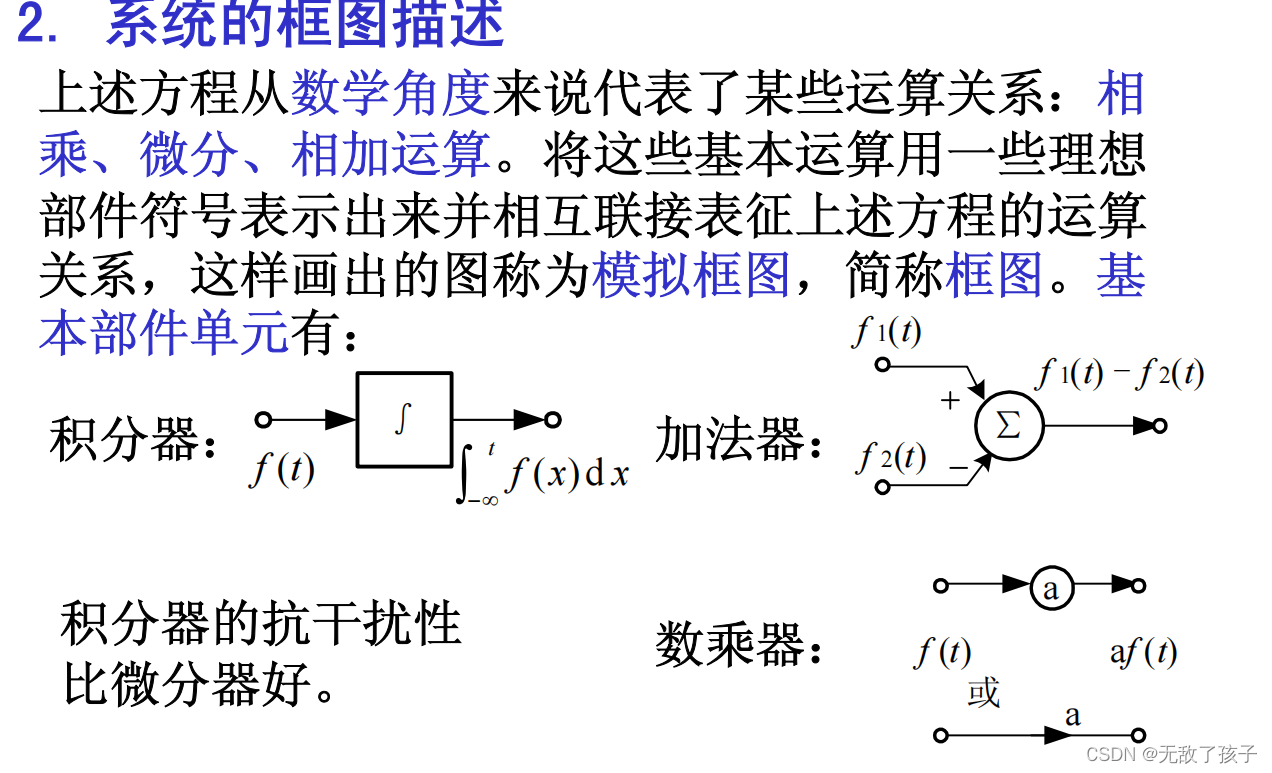
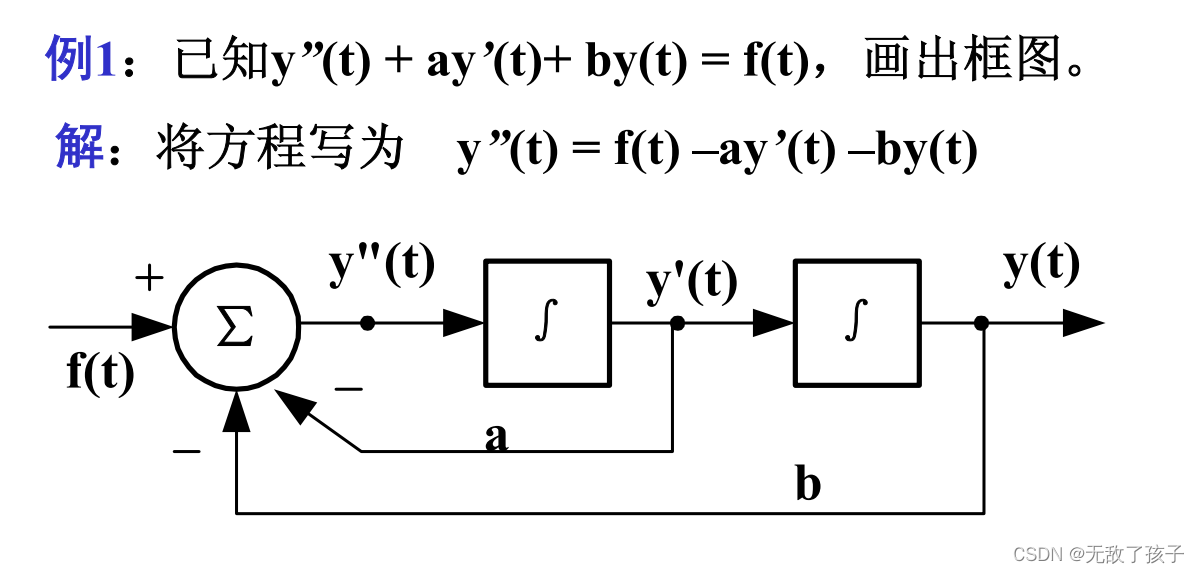
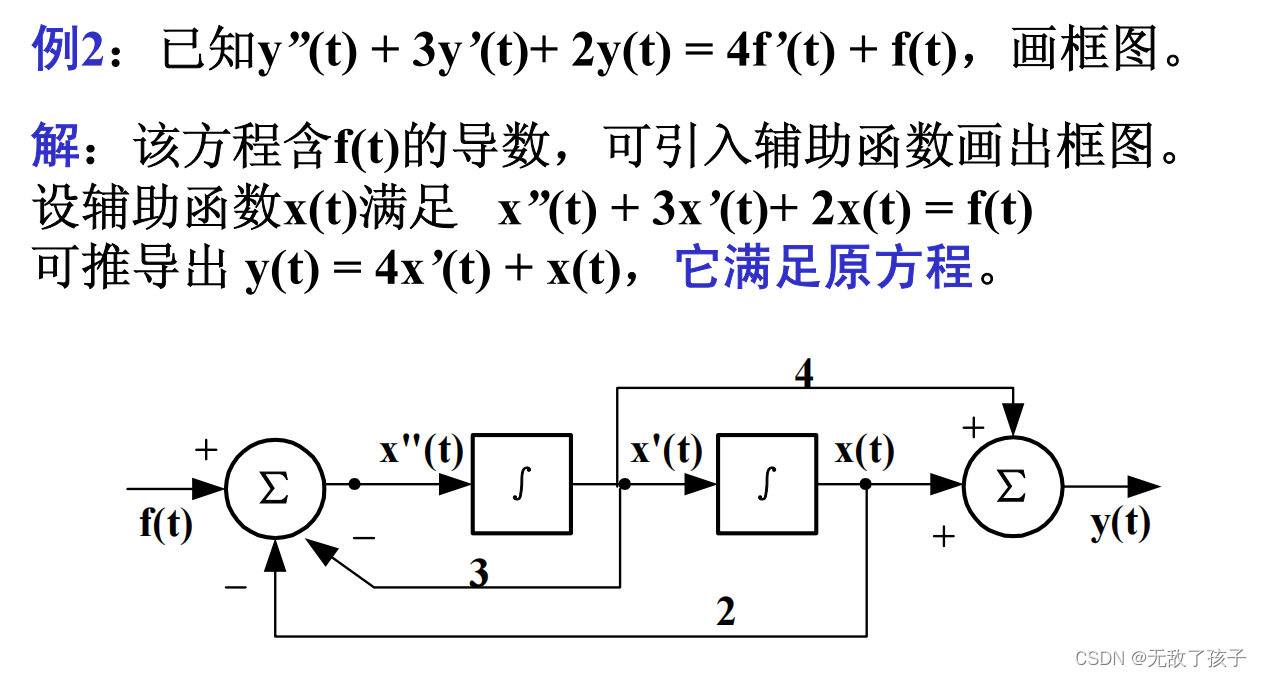
系统框图
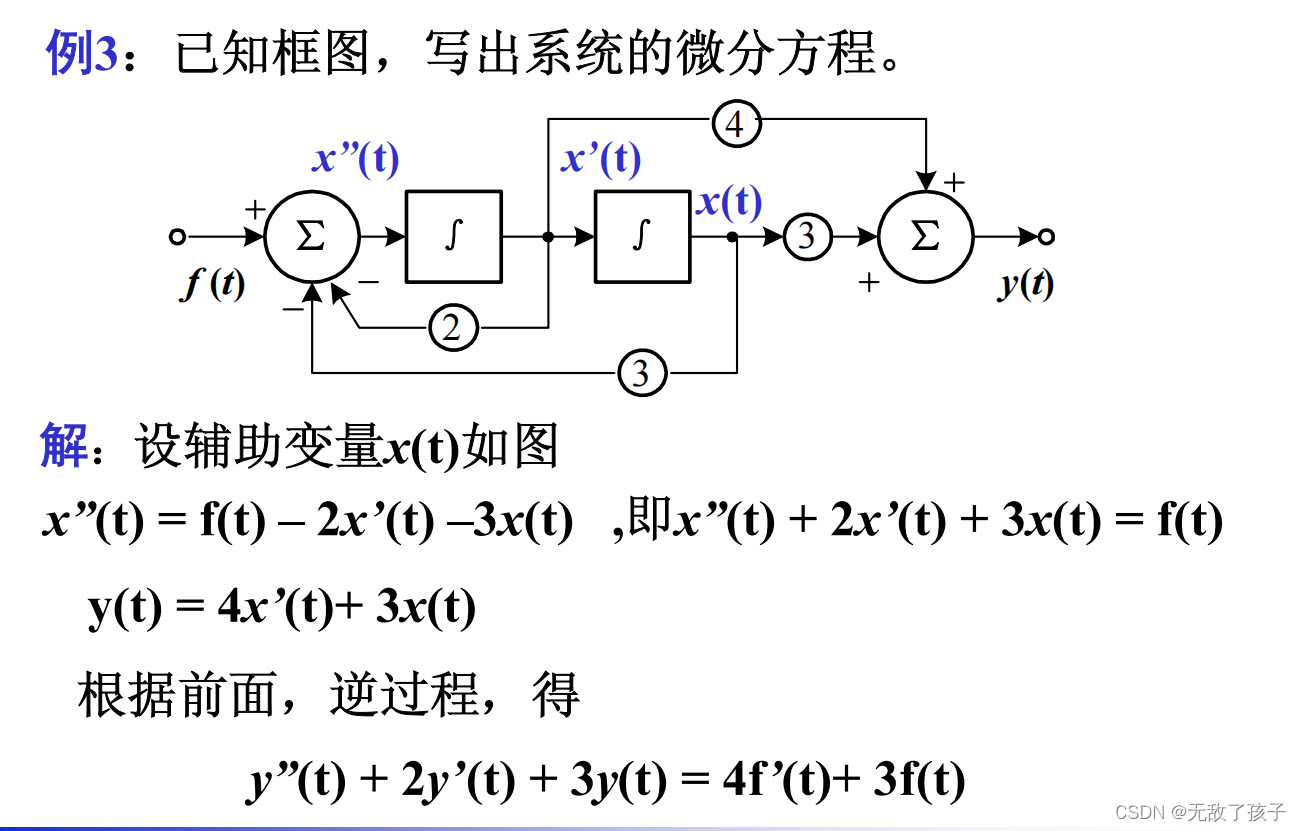
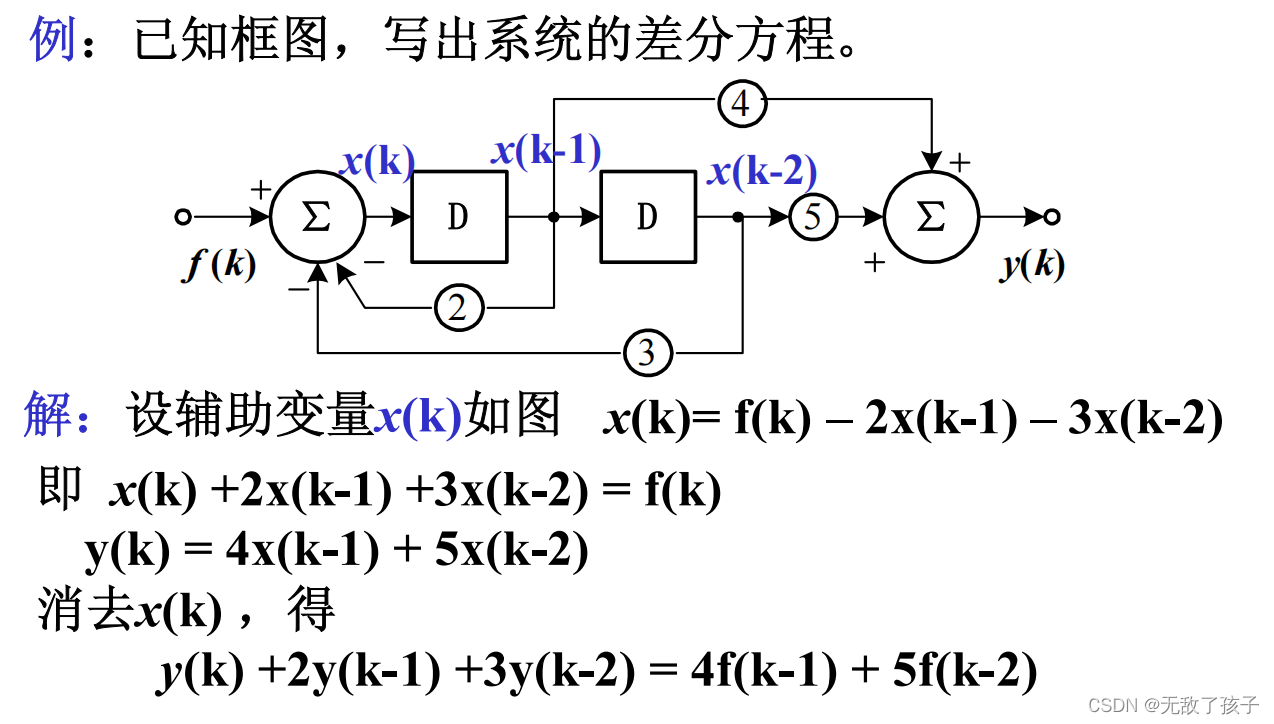
1.5 离散系统
建立差分方程
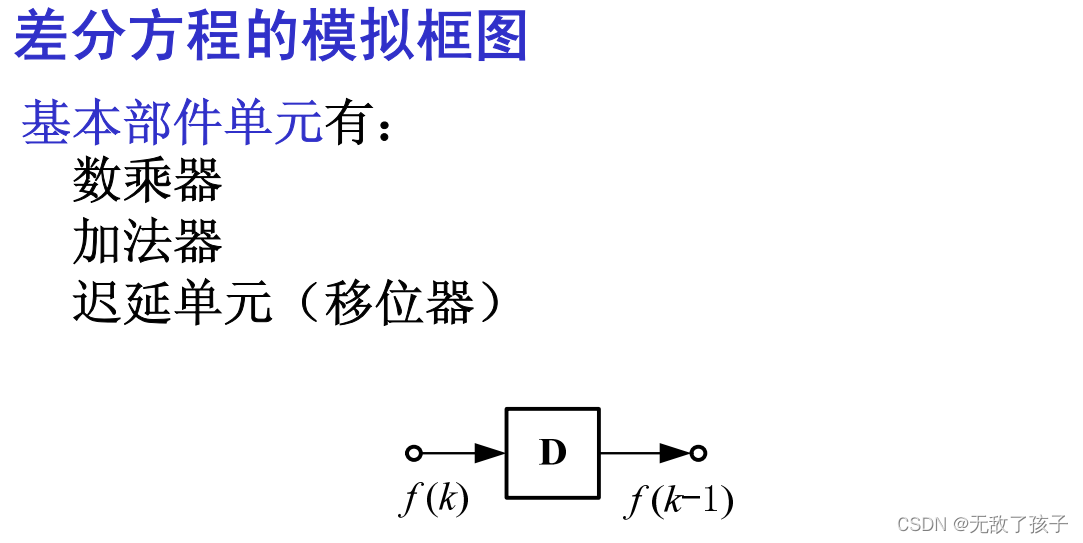
方程与框图的变换在后续章节还会有变换域方法和梅森公式更加简单。
1.6 系统的特性和分析方法
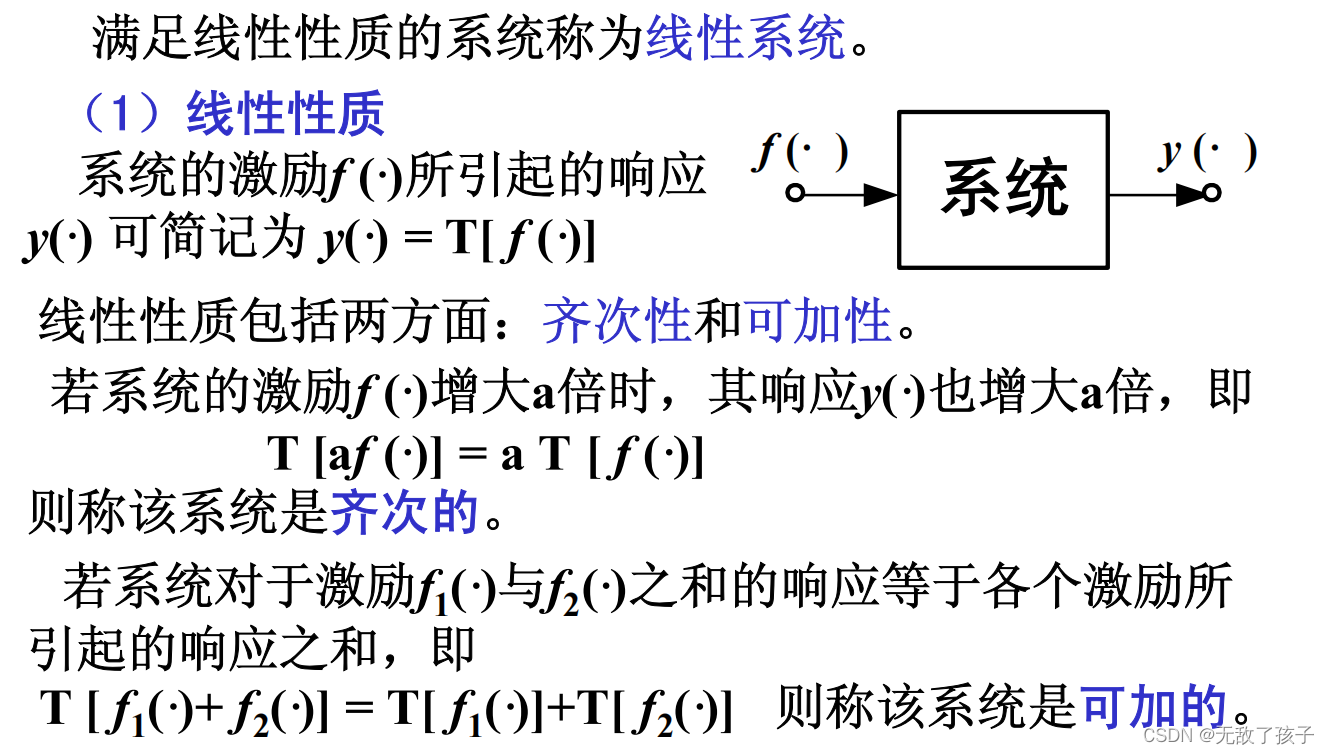
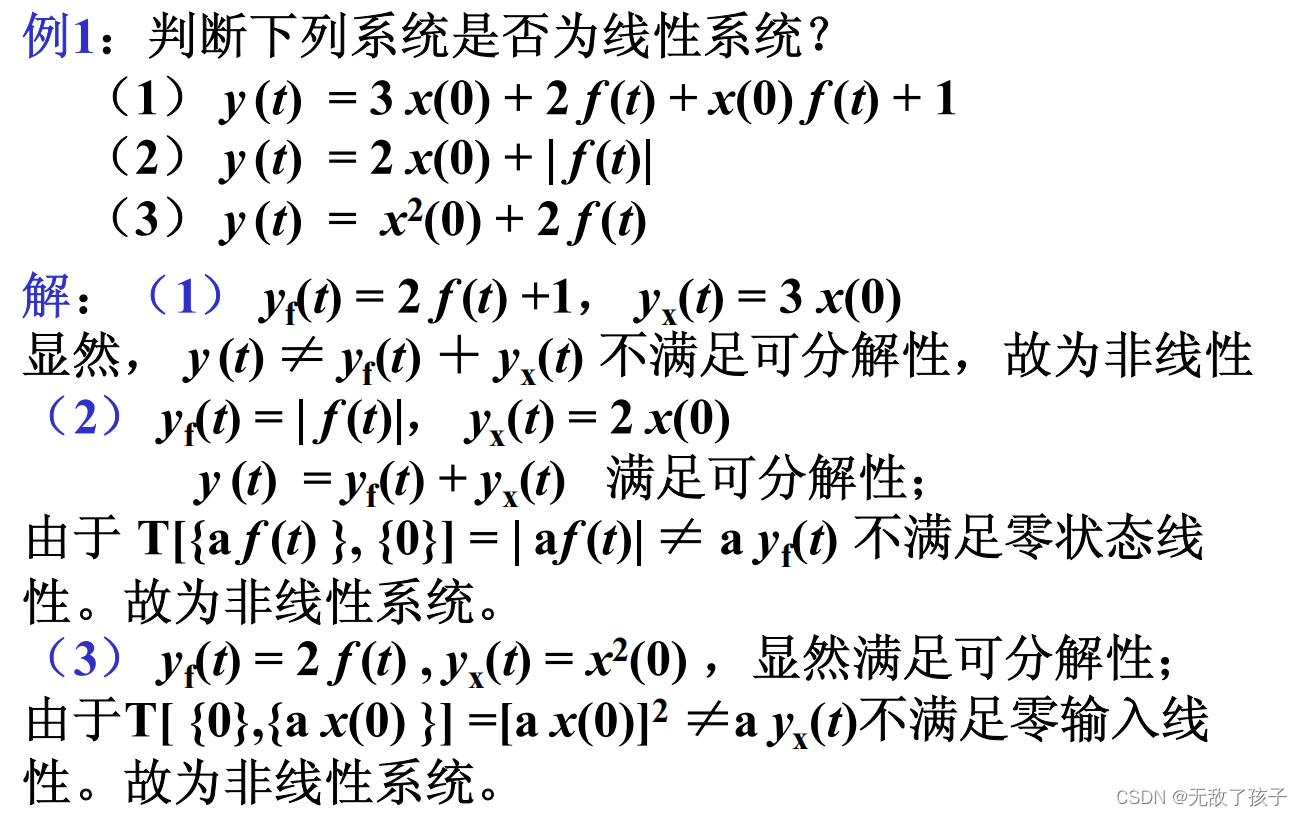
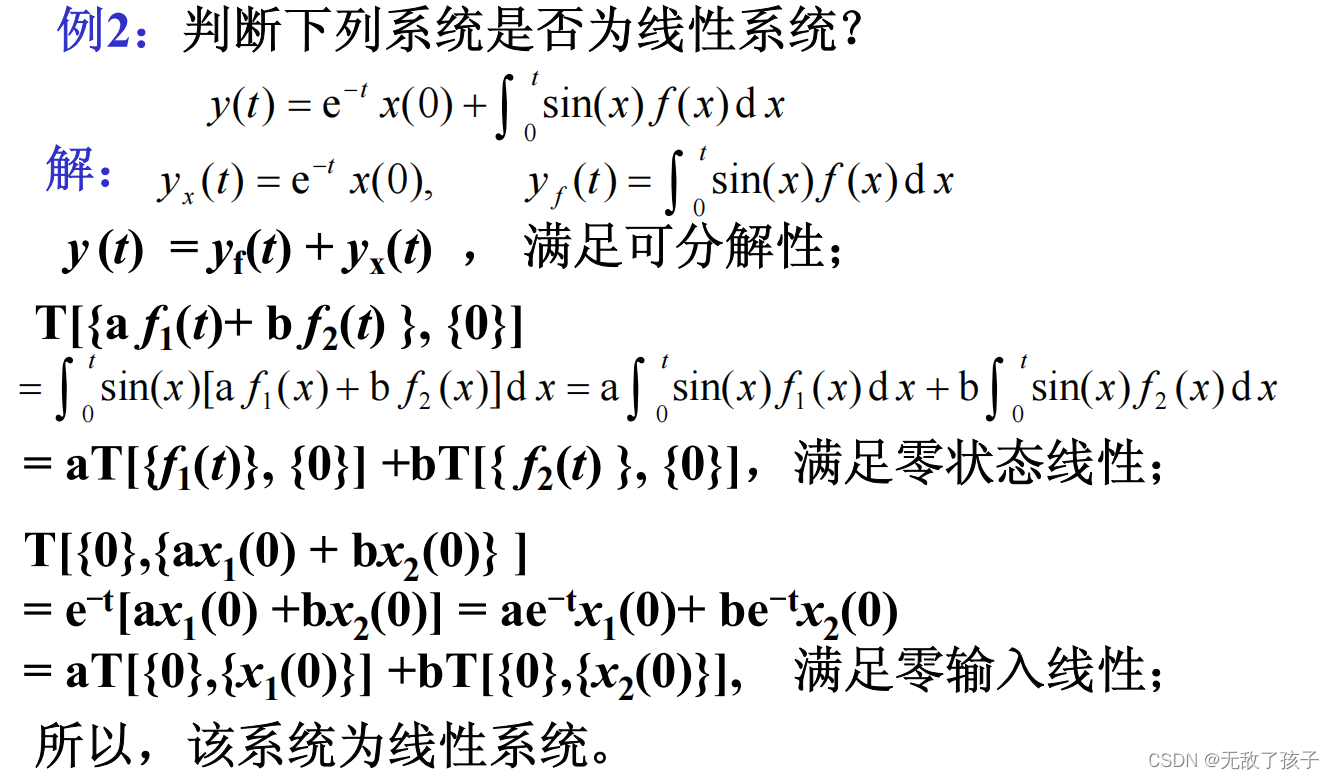
1.6.1 线性
线性包括两个内容:齐次性和可加性。

例题
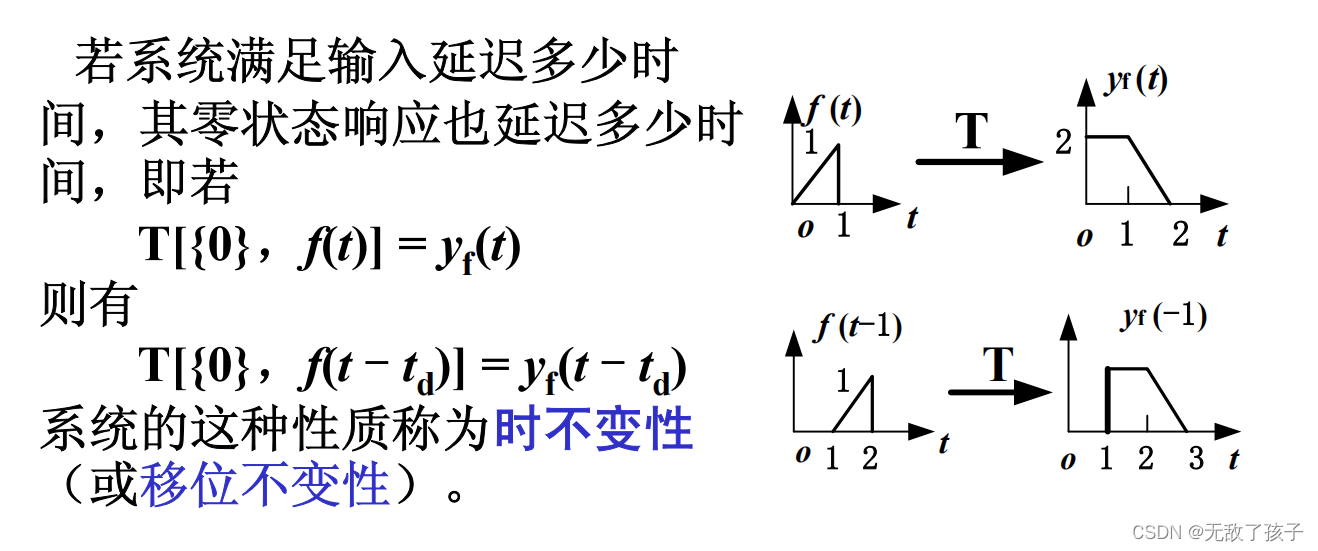
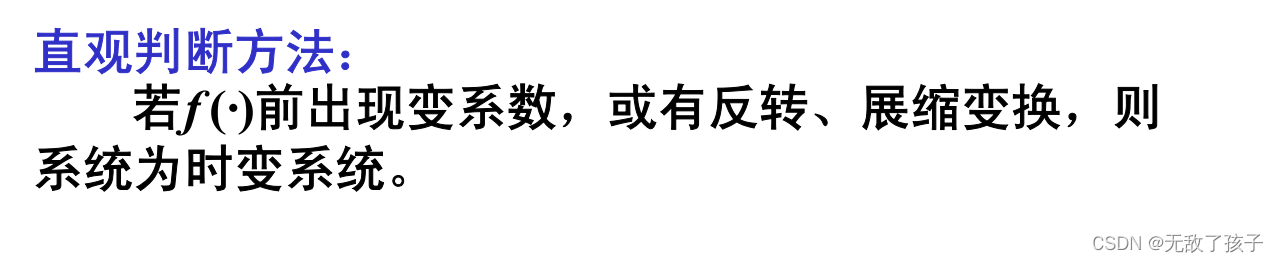
1.6.2 时变与时不变系统
本书主要讲解时不变系统
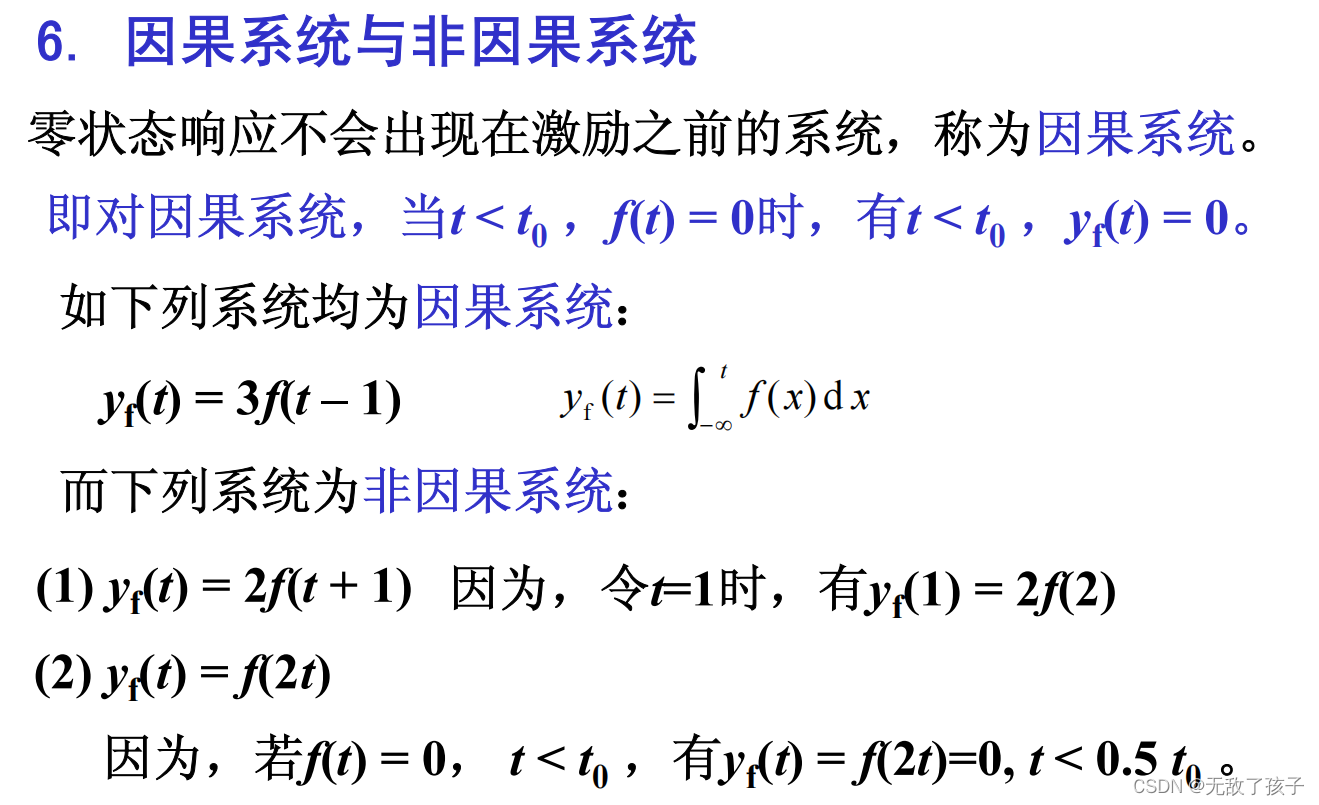
1.6.3 因果与非因果
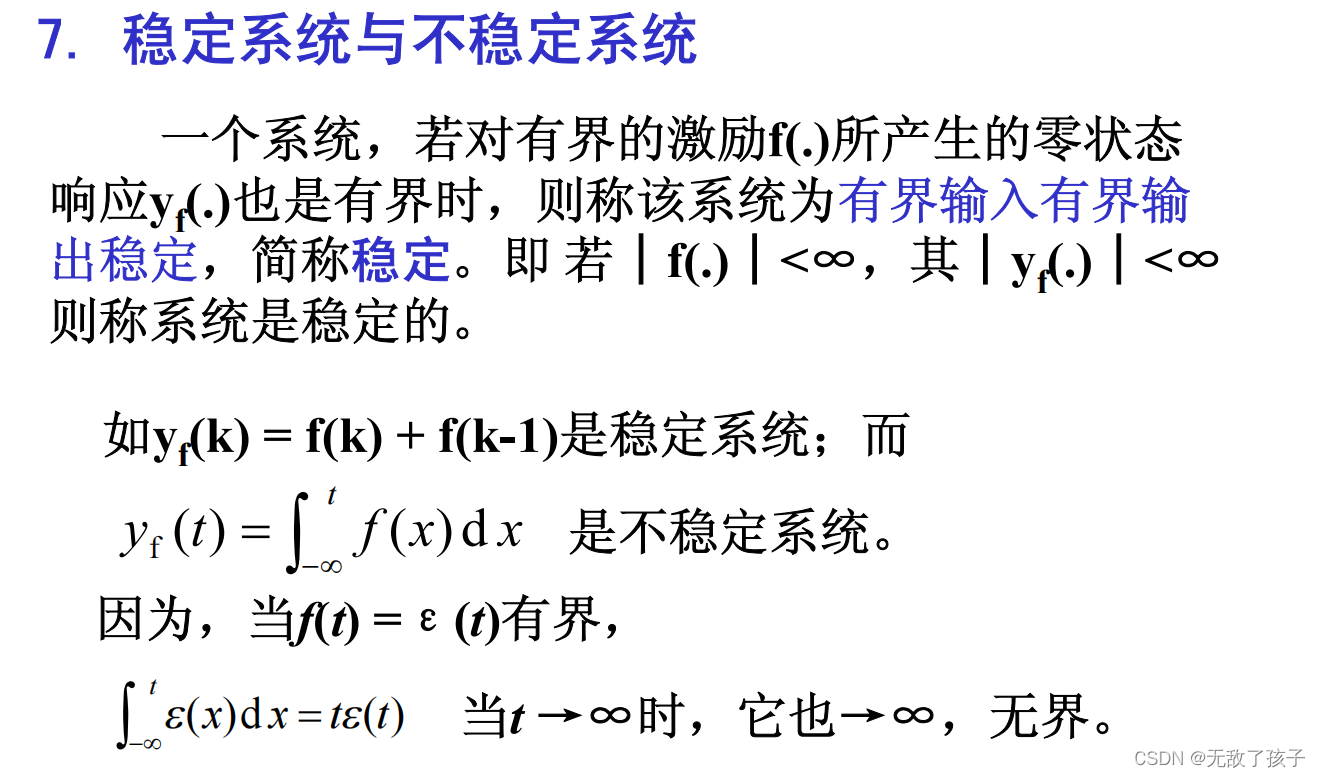
1.6.4 稳定与不稳定
















 5696
5696











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









