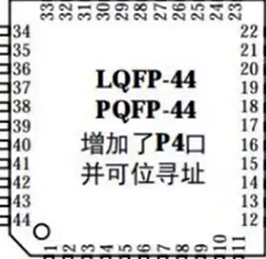
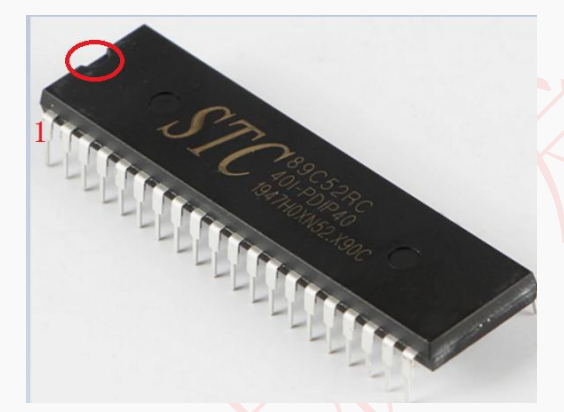
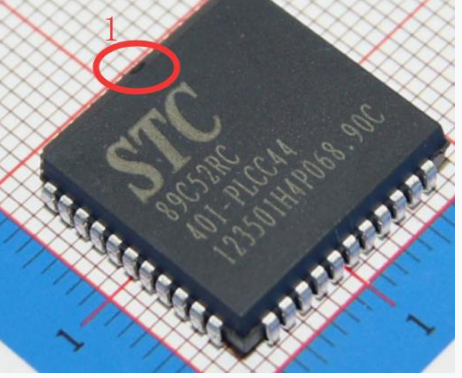
单片机脚位判定 无论哪种芯片或者单片机,它的表面总有一个小圆坑或者有一个小标记,这个小圆坑或者小标记对应的引脚就是这个芯片的第1脚。 芯片上的脚位都是按逆时针从一角开始递增到最后一个引脚 LQFP封装的51 小圆坑的正下方是1脚,沿逆时针方向增大 DIP封装的51 圆坑左边第一个脚位即1脚 PICC封装 圆坑对应的正下面即1脚

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





























 6342
6342





