






以下是分享的一些个人的学习理解:
(1)PLCC封装引脚判断:
首先查看芯片表面:找到芯片上的凹槽处:如下图所示
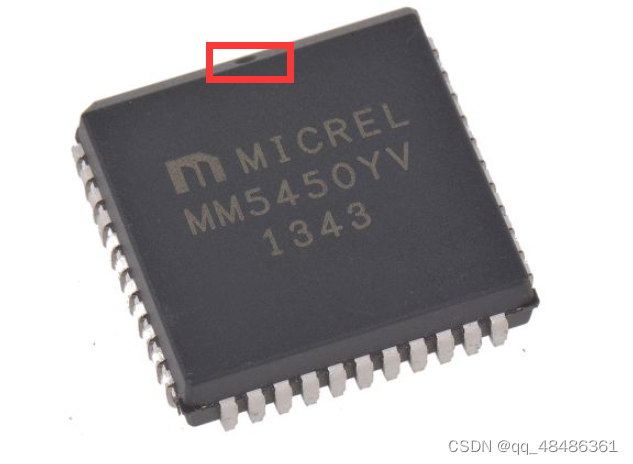
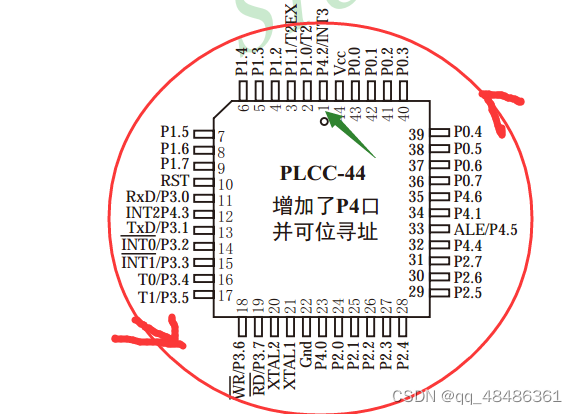
然后查看芯片引脚图,管脚排列规则一般采用逆时间排列,找到对应的管脚1,如下图所示:
(2)DIP封装、LQFP/PQFP引脚判断也如上所示:
1)先找到凹槽处,然后对应原理图找到对应的1管脚
2)按照逆时针顺序依次对应管脚数,便可快速判断引脚位的判断
以下是分享的一些个人的学习理解:
(1)PLCC封装引脚判断:
首先查看芯片表面:找到芯片上的凹槽处:如下图所示
然后查看芯片引脚图,管脚排列规则一般采用逆时间排列,找到对应的管脚1,如下图所示:
(2)DIP封装、LQFP/PQFP引脚判断也如上所示:
1)先找到凹槽处,然后对应原理图找到对应的1管脚
2)按照逆时针顺序依次对应管脚数,便可快速判断引脚位的判断
 1040
1750
2285
2197
2180
1040
1750
2285
2197
2180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























