







一、前言
2024年的RoboCup3d比赛由于规则的更改导致Ubuntu版本更换,而Ubuntu由于版本更新到22.04LTS后导致部分依赖更新,使得现在CSDN上搜到的有关RoboCup环境配置的教程大多不适用。为了帮助初学者解决这个问题,特意写了这篇文章。(我第一次写类似文章,如果有错误,还望各位加以指正)
二、注意!!!
- 请使用Ubuntu22.04LTS版本安装,本文通过Ubuntu22.04LTS成功配置好了仿真环境。
- 安装时如果出现下载失败或者下载过慢,请进行换源等操作将Ubuntu软件源更换成国内源。
- 由于安装的各个过程存在先后关系,请按照先后顺序依次进行
- 注意运行指令时的地址,必须得在指定文件夹内
三、配置步骤
1、安装依赖库
\Ubuntu18.04或者更早版本使用以下指令(对于以往版本的配置感兴趣的兄弟,可以观摩奉系坤阀大佬的文章Robocup3D 环境搭建-CSDN博客):
sudo apt-get install g++
sudo apt-get install subversion
sudo apt-get install cmake
sudo apt-get install build-essential
sudo apt-get install libfreetype6-dev
sudo apt-get install libode-dev
sudo apt-get install libsdl-dev
sudo apt-get install ruby
sudo apt-get install ruby-dev
sudo apt-get install libdevil-dev
sudo apt-get install libboost-dev
sudo apt-get install libboost-thread-dev
sudo apt-get install libboost-regex-dev
sudo apt-get install libboost-system-dev
sudo apt-get install qt4-default由于版本更新,上述命令中的部分内容需要进行一定的修改。修改后打开终端,依次输入以下终端指令:
sudo apt-get install g++
sudo apt-get install git
sudo apt-get install make
sudo apt-get install cmake
sudo apt-get install libfreetype6-dev
sudo apt-get install libode-dev
sudo apt-get install libsdl1.2-dev
sudo apt-get install ruby
sudo apt-get install ruby-dev
sudo apt-get install libdevil-dev
sudo apt-get install libboost-dev
sudo apt-get install libboost-thread-dev
sudo apt-get install libboost-regex-dev
sudo apt-get install libboost-system-dev
sudo apt-get install qtbase5-dev
sudo apt-get install qtchooser
sudo apt-get install qt5-qmake或者一次性输入以下终端指令:
sudo apt-get install g++ git make cmake libfreetype6-dev libode-dev libsdl1.2-dev ruby ruby-dev libdevil-dev libboost-dev libboost-thread-dev libboost-regex-dev libboost-system-dev qtbase5-dev qtchooser qt5-qmake2、安装SimSpark源码包
git clone https://gitlab.com/robocup-sim/SimSpark.git/下载成功后终端显示应该是如下图所示
3、编译并安装SimSpark源码
所有终端指令需在下面所示地址中
/home/用户名/桌面/SimSpark3.1、操作一
bash build.shSimSpark更新后,自带编译安装脚本build.sh,如果安装失败也有自带的clean.sh用于清理相关文件。
3.2、操作二
# Build SimSpark
cd spark
mkdir build
cd build
cmake ..
make -j$(nproc)
sudo make install
# Build rcssserver3d
cd ../../rcssserver3d
mkdir build
cd build
cmake ..
make -j$(nproc)
sudo make install编译安装成功后,应当如下图所示
4、验证rcssserver3d等是否安装成功
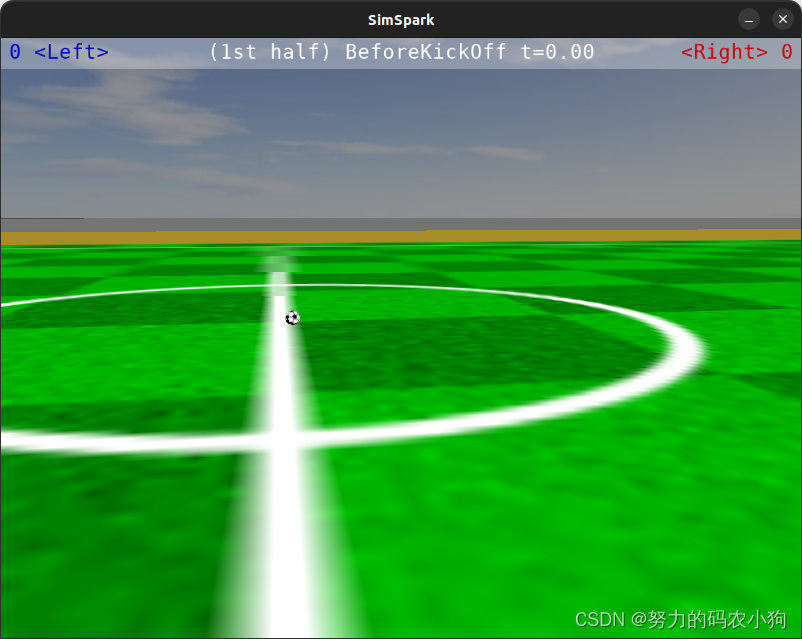
打开终端,输入rcsoccersim3d指令,如果能够弹出一个球场窗口,也就是下图所示,则表明安装成功。
5、安装java
sudo apt-cache search jdk
sudo apt-get install openjdk-8-jdk安装成功,输入终端指令,出现下图所示,代表成功。

6、编译安装roboviz源码包
6.1、下载roboviz源码包
git clone https://github.com/magmaOffenburg/RoboViz或者在Gitcode上找到加速项目
6.2、编译安装roboviz
cd RoboViz/scripts
./build.shroboviz更新后采用的是gradle,下载巨慢,给我等得前列腺爆炸了都。还经常出现失败的情况,如果各位有等不住的,可以看一下修鞋匠大佬的Ubuntu22.04LTS部署Robocup3D开发环境_ubuntu rcsserver3d-CSDN博客,里面有相关操作可以加快速度。
6.3、用roboviz替代rcssserver3d自带的monitor(rcssmonitor3d)
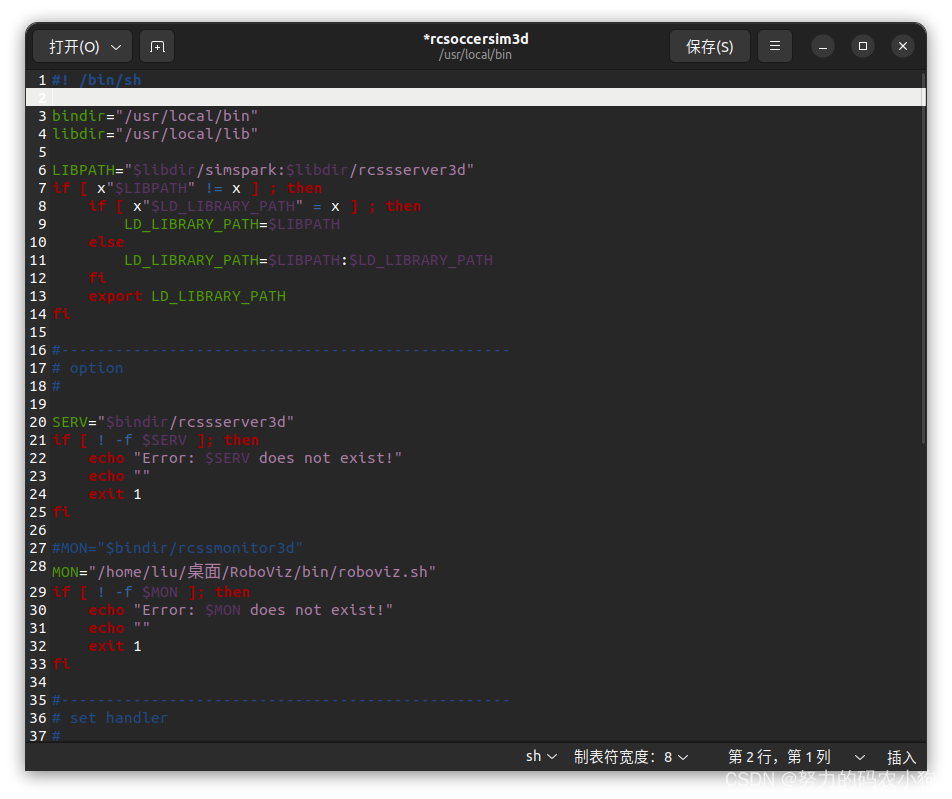
sudo gedit /usr/local/bin/rcsoccersim3d把MON="$bindir/rcssmonitor3d"注释掉,改成编译的RoboViz/bin/roboviz.sh。文件路径搞不准的就手动找到RoboViz/bin/roboviz.sh,复制好路径。
6.4、测试RoboViz是否安装成功
rcsoccersimd
出现这个球场图片,即代表成功。
7、采用旧版本RoboViz
如果gradle无法成功部署roboviz.jar包,可以采用先打开服务器,再打开旧版本roboviz的方法,来解燃眉之急。文件打包好,放在百度网盘上进行分享了,具体网址如下:
链接:https://pan.baidu.com/s/1zjVj5V0L0TlgJiVL2JjR_w?pwd=2024
提取码:2024
rcssserver3d
cd SimSpark/bin
./roboviz.sh输入终端指令后,结果也能弹出球场
















 827
827











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









