







这篇文章充分借鉴了这篇文章,基本就是拿这个当模板做的,非常感谢这个文章的作者
链接:https://blog.csdn.net/Lvoving/article/details/128762328
————————————————
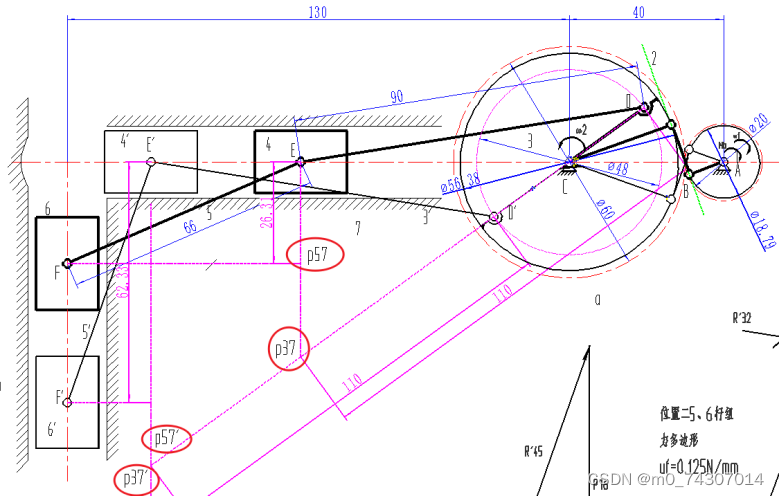
右侧齿轮为齿轮一,匀速转动,顺时针360rpm,左侧齿轮为齿轮二
!!!本文中多项式的length用的 l 代替的
这里面做了一些速度瞬心,是图解法用到的,这里解析法请忽略
当 theta2 > 144*pi/180 && theta2 < 216*pi/180 的时候,滑块4受到向右的生产阻力227N。
表示角度的theta均为与横轴向右的夹角,如下图(有一个命名为theta的数组,包含了角位移和线位移)length4和length6均为E点和F点的位移,在如下坐标系中为负位移,为了保持一致,设L为-130。
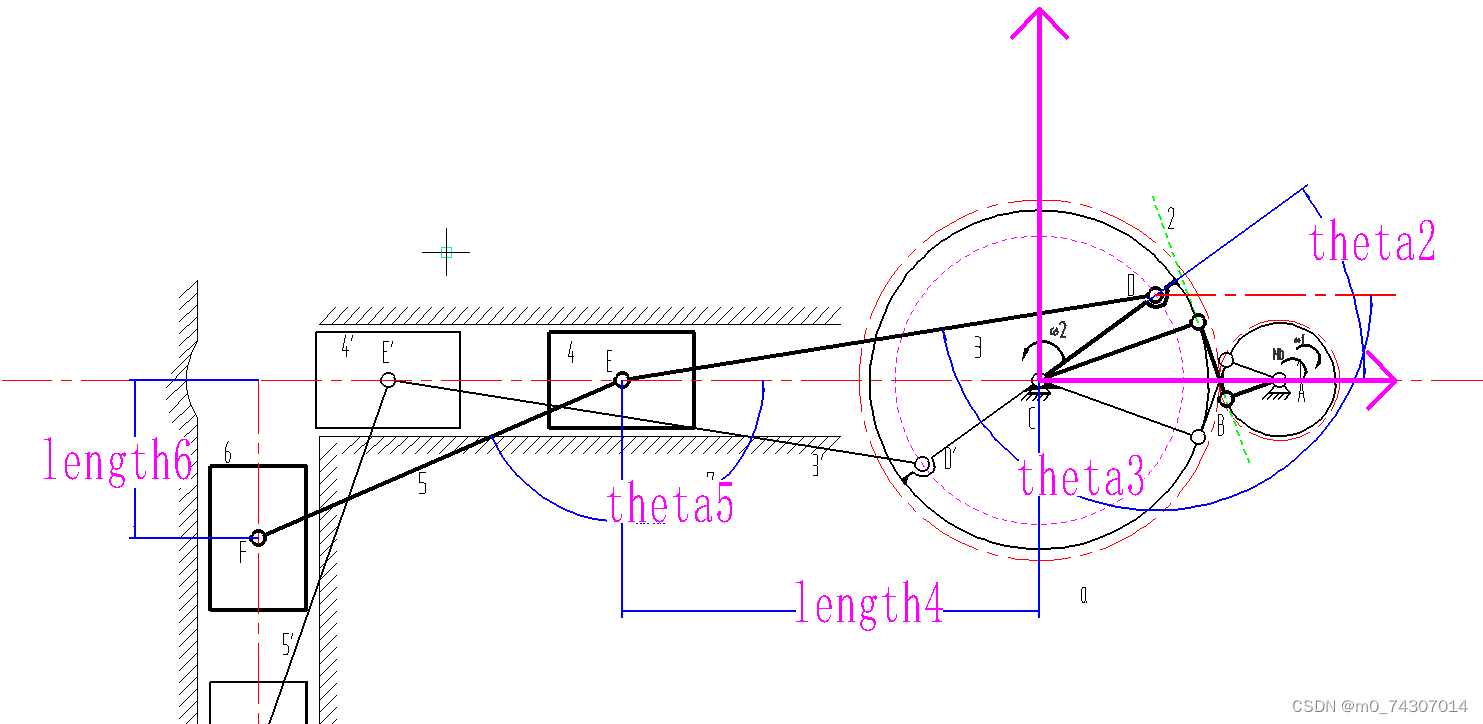
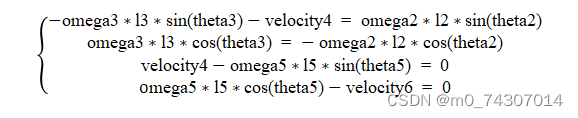
根据两个封闭图形列出矢量在x轴、y轴的投影关系
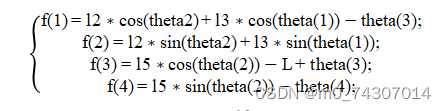
其中L代表-130
求一阶导数
将上述一阶导数的方程组写成矩阵形式
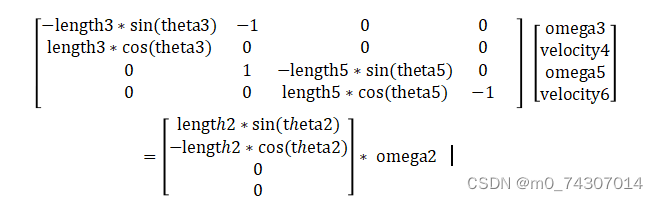
在matlab中:
设A阵
A=[-length3*sin(theta(1)),-1,0,0;
length3*cos(theta(1)),0,0,0;
0,1,-length5*sin(theta(2)),0;
0,0,length5*cos(theta(2)),-1];
设B阵
B=[length2*sin(theta2);-length2*cos(theta2);0;0];
返回omeg
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1664
1664

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









