






题目描述
一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。
机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish”)。
现在考虑网格中有障碍物。那么从左上角到右下角将会有多少条不同的路径?
网格中的障碍物和空位置分别用 1 和 0 来表示。
示例 :
输入:obstacleGrid = [[0,0,0],[0,1,0],[0,0,0]]
输出:2
解释:3x3 网格的正中间有一个障碍物。
从左上角到右下角一共有 2 条不同的路径:
1. 向右 -> 向右 -> 向下 -> 向下
2. 向下 -> 向下 -> 向右 -> 向右
思路
本题相对与不同路径那道题其实异曲同工,无非是多了一些条件判断罢了。废话少说,直接看动态规划解法
dp[i][j] :表示从(0 ,0)出发,到(i, j) 有dp[i][j]条不同的路径。
状态转移方程:dp[i][j] = dp[i - 1][j] + dp[i][j - 1]。
初始化:根据状态转移方程,我们只需初始化dp[i][0]和dp[0][i],但这里需要注意一点,因为有了障碍,(i, j)如果就是障碍的话应该就保持初始状态(初始状态为0)。即遇上障碍后,该坐标后面的格子均为0。
解法
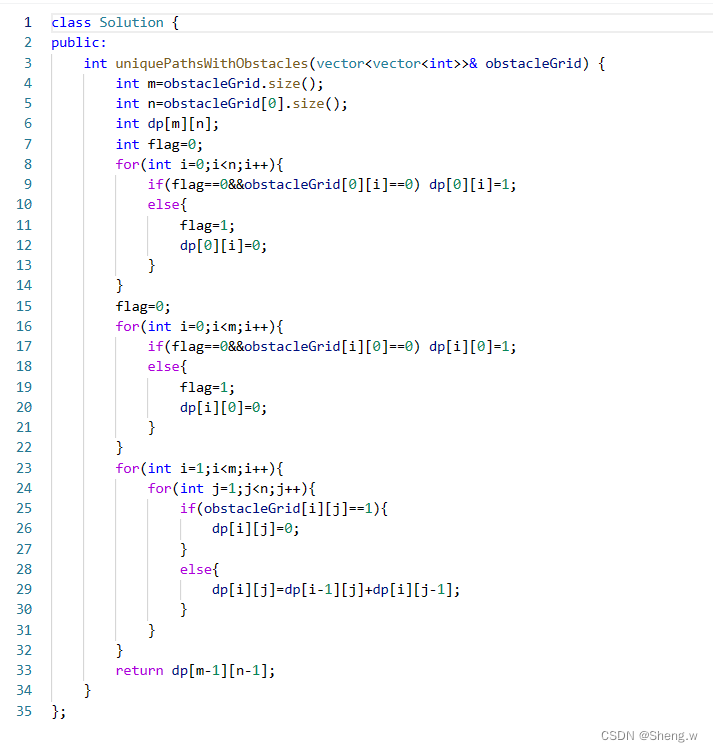
C++版本
Java版本
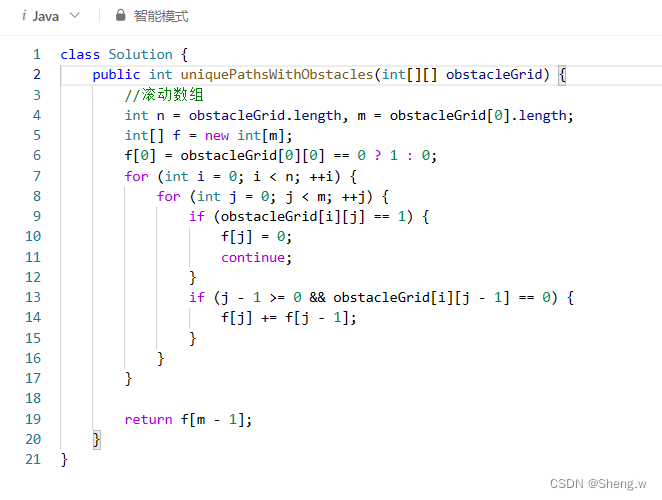
拓展
我们可以运用滚动数组,降低空间复杂度。















 1967
1967











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









