







慧创近红外脑功能成像(fNIRS)具备全脑检测、超灵敏检测和便携等多项优势,在人因工程领域研究中展现了其出色的性能。这为基于脑血氧变化的认知决策分析提供了客观数据支持,为人因工程研究开辟了新的路径。
人因工程(Human Factors Engineering),也称为人体工程学或人机工程学,是一门研究人在系统中的行为、认知和生理特征,并通过优化系统设计来提高效率、安全性和用户体验的学科。
近年来,功能性近红外光谱(fNIRS)作为一种无创、实时监测脑部血流变化的技术,逐渐在人因工程领域中得到了广泛应用。fNIRS能够在多种工作场景中捕捉大脑功能活动变化,帮助研究人员和管理者评估个体在应对复杂动态环境时的认知需求与反应,从而优化任务设计与安全管理策略。
1 基于多模态方法测量施工场所危险识别的认知需求

研 究 团 队
清华大学 张丹团队、廖彬超团队
使 用 设 备
慧创NirSmart

背 景
危险识别在以往研究中已被广泛探索。然而,由于忽视任务特异性影响、基于图片的实验任务带来的信息失真以及仅使用眼动追踪设备,研究存在一定不足。
方 法
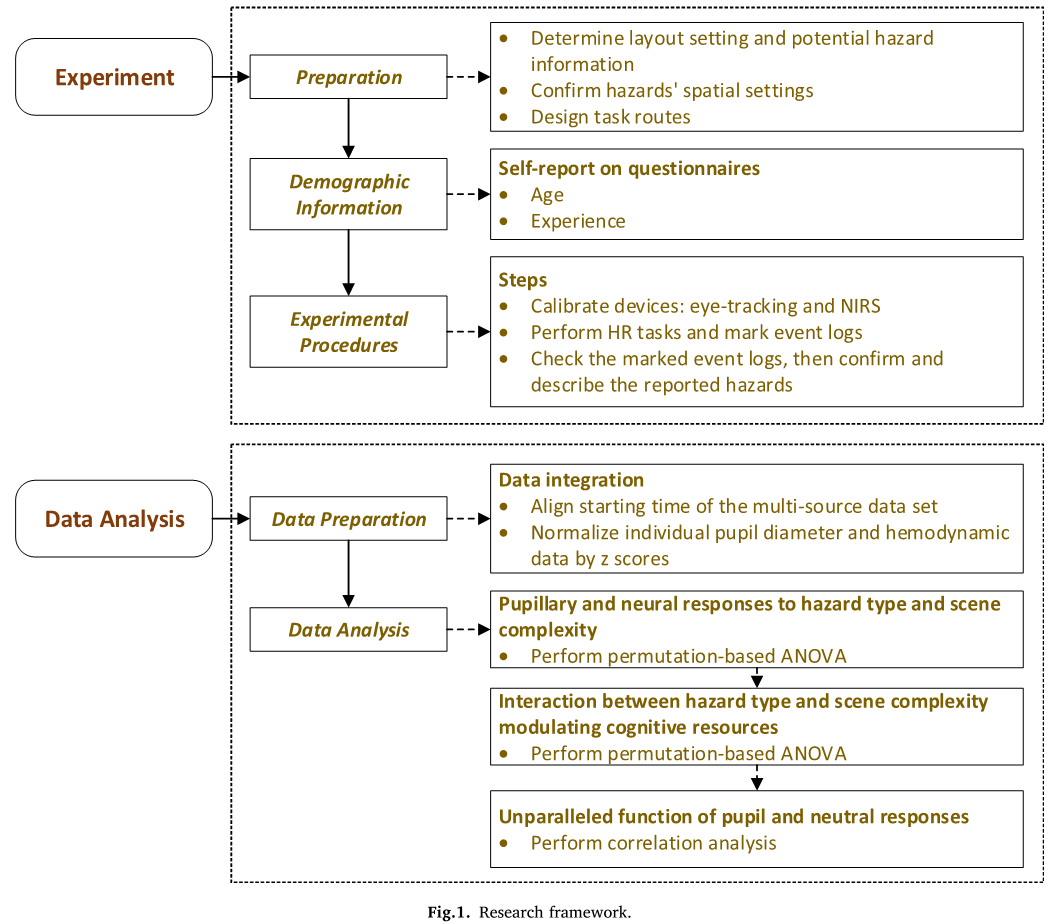
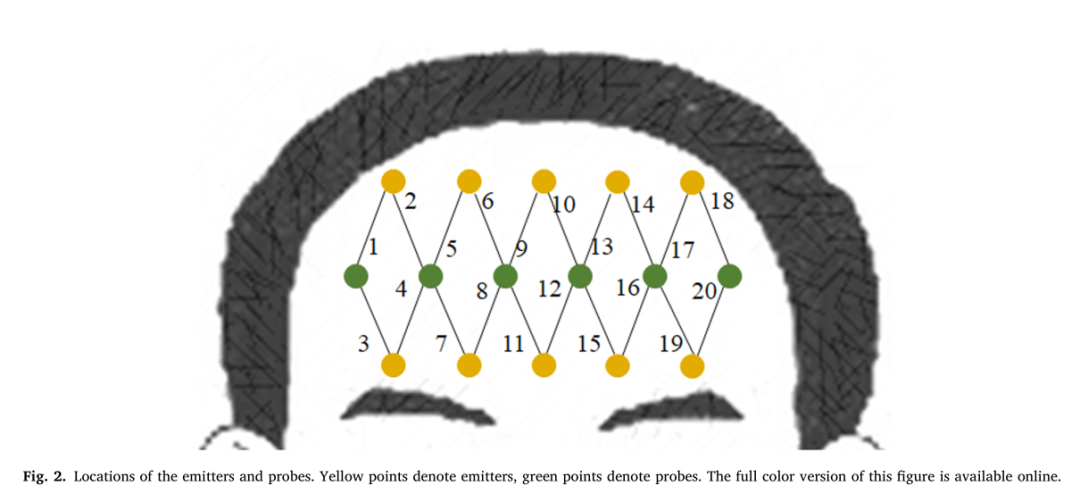
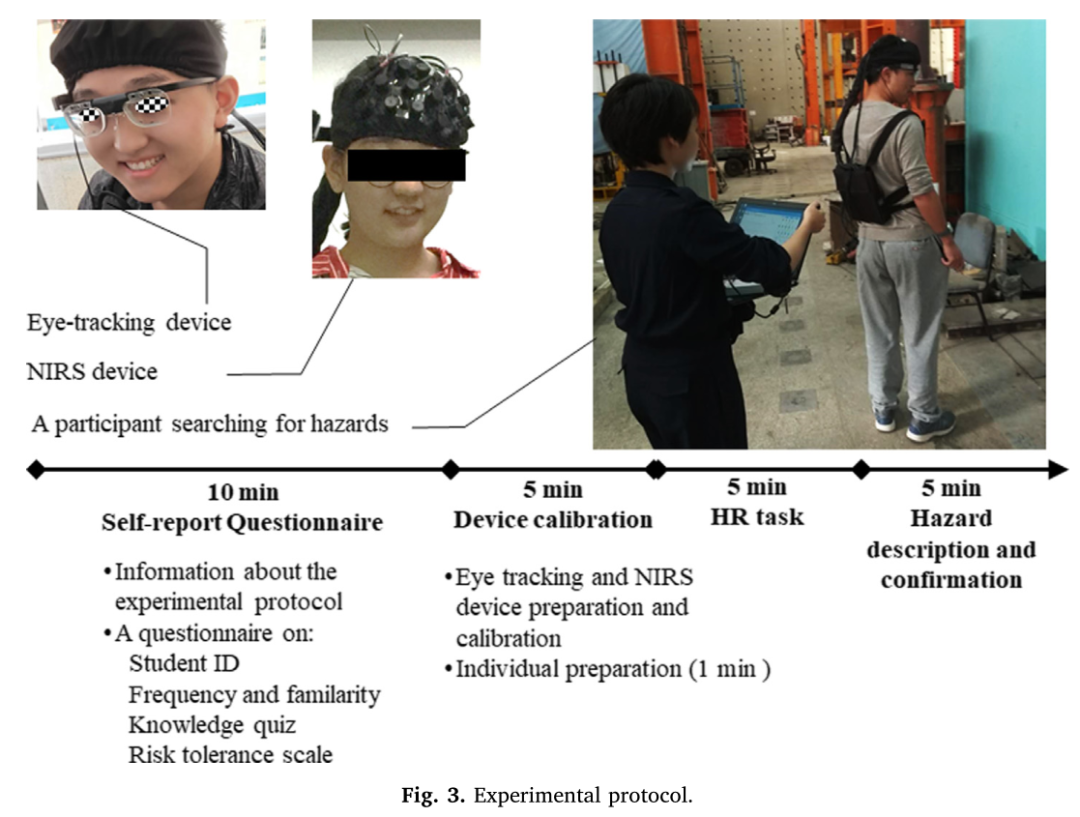
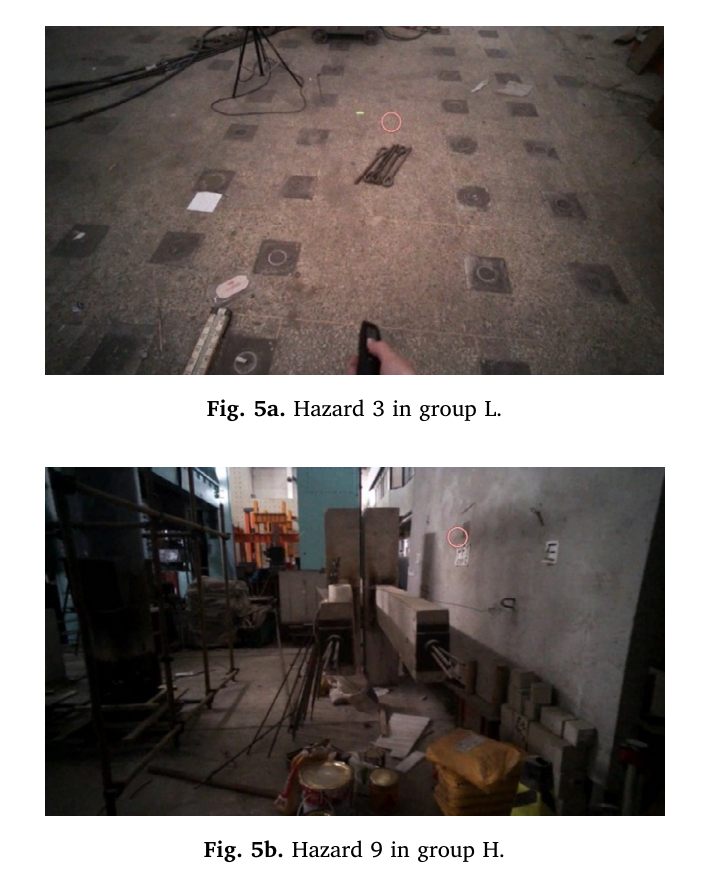
该研究旨在通过多模态监测探讨在不同类型危险的模拟施工现场中认知模式的变化情况。在一个模拟的危险土木实验室中,使用眼动追踪仪和近红外光谱系统进行危险识别任务,以捕捉瞳孔反应和大脑氧合血红蛋白信号。该研究根据危险类型和场景复杂性分析了认知反应。
结 果
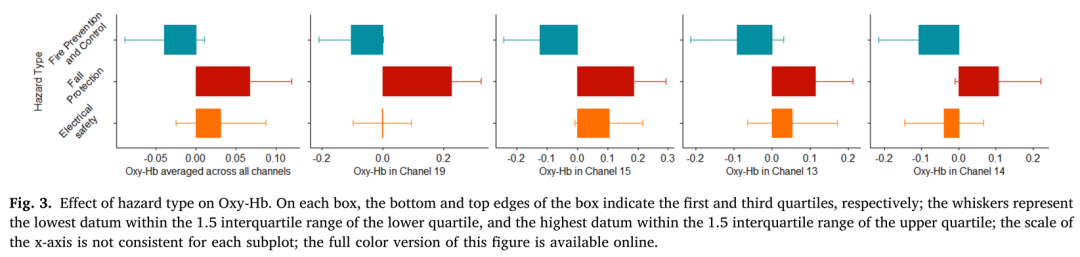
高处坠落危险引发了最显著的大脑和瞳孔激活。场景复杂性会导致瞳孔直径的增加,并与危险类型相互作用影响大脑活动。该研究还揭示了瞳孔反应与脑功能在模拟危险工地中的互补作用以及认知资源的天花板效应。
结 论
不同类型的施工场所危险会引发不同的认知需求,因此应分别对待。这些信息在实际应用中具有潜在的价值。
关 键 词
危险识别、近红外光谱、多模态监测、职业环境、安全管理
参 考 文 献
Liao, P. C., Sun, X., & Zhang, D. (2021). A multimodal study to measure the cognitive demands of hazard recognition in construction workplaces. Safety science, 133, 105010.
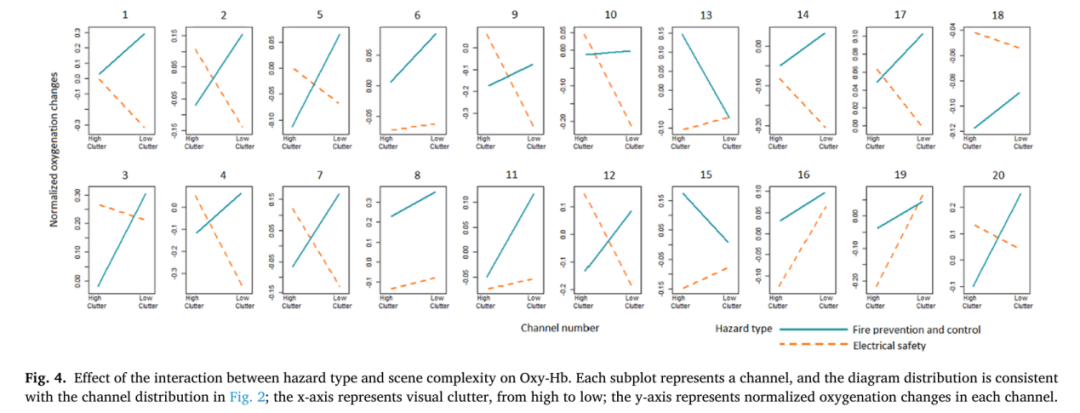
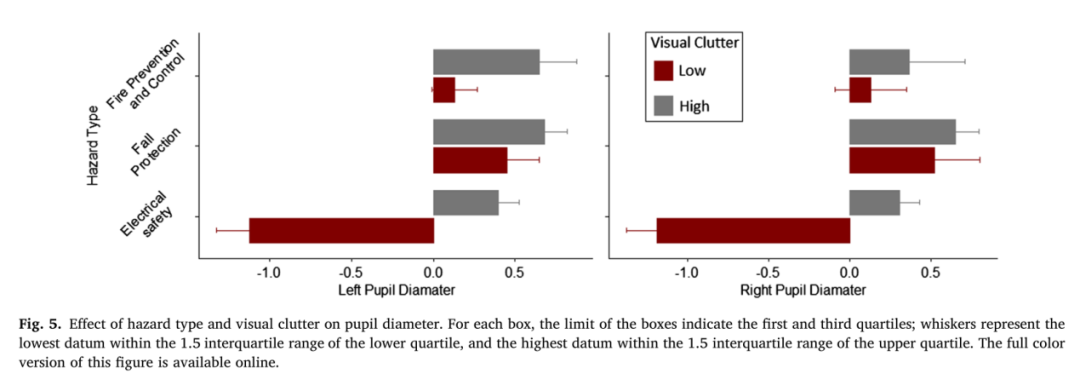
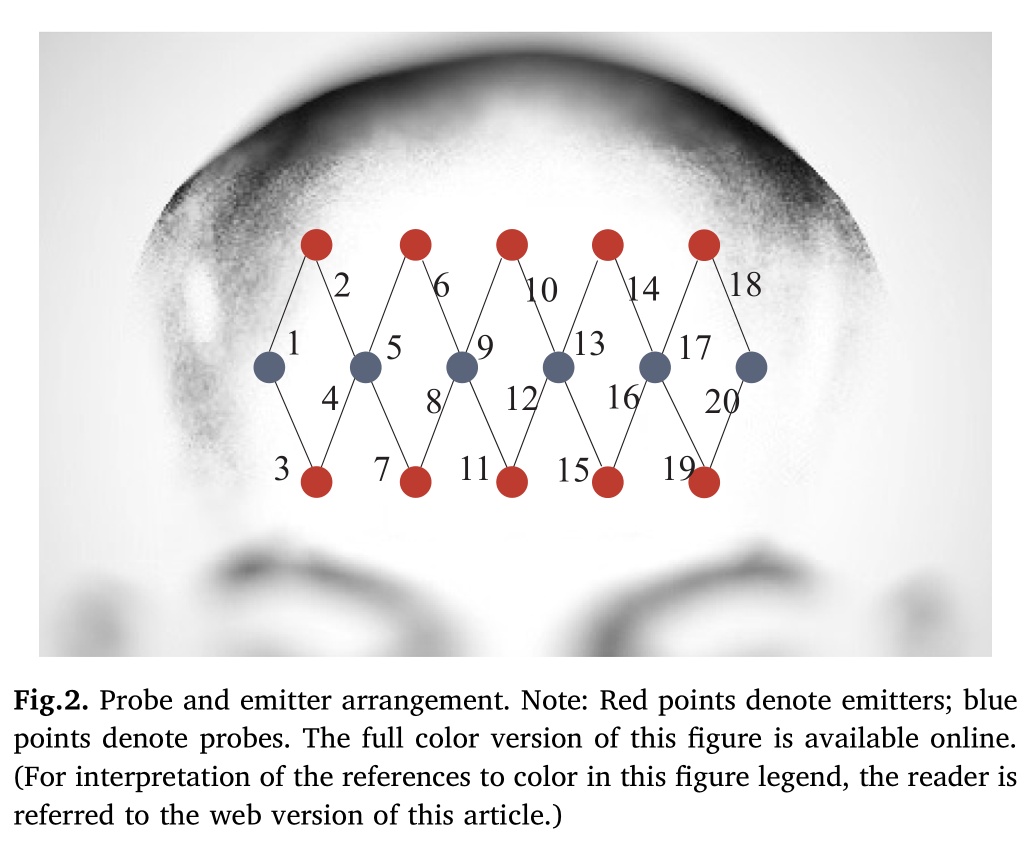
2 重新评估脑功能在职业环境中对危险识别能力的影响
研 究 团 队
清华大学 廖彬超团队
使 用 设 备
慧创NirSmart
背 景
危险识别(HR)是复杂动态职业环境中安全管理的关键过程。尽管先前的研究尝试量化危险识别能力(HRA),但因实验设置和/或单一数据采集渠道的局限性,结果可能过于乐观。
方 法
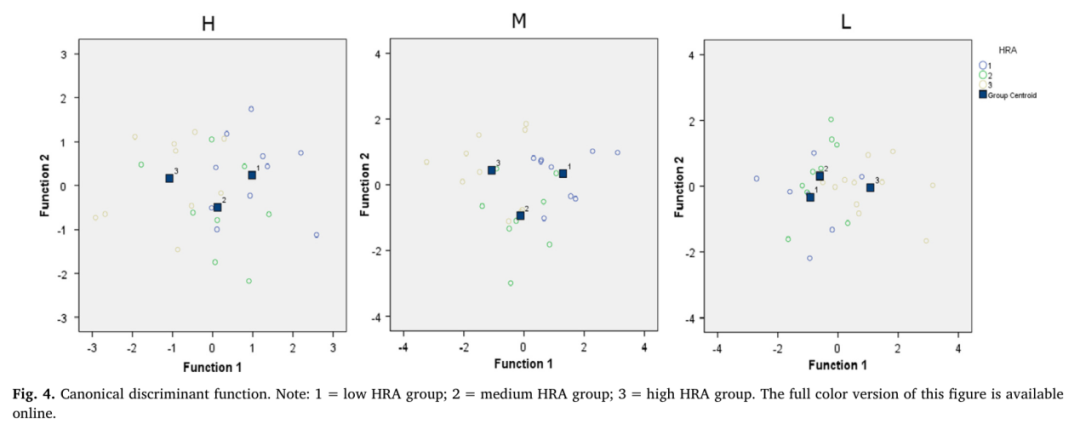
该研究旨在重新开发一个结合脑功能的综合HRA指标。首先,作者识别出HR的关键指标,并设计了一个在真实场景中进行的实验。数据通过问卷(经验和风险容忍度)、眼动追踪设备(眼动)以及近红外光谱系统收集。最后,通过判别分析构建HRA指标。
结 果
该HRA指标的预测准确性优于以往方法。从理论上讲,该研究提供了评估HRA的新视角(前额叶皮层血流动力学特性的变化)。
结 论
该研究所提出的HRA指标可用于对工人或安全检查员的实时评估,从而减少人为失误和未检测的职业危险。
关 键 词
危险识别能力、近红外光谱、建筑安全管理、实时检查、职业环境
参 考 文 献
Sun, X., & Liao, P. C. (2019). Re-assessing hazard recognition ability in occupational environment with microvascular function in the brain. Safety Science, 120, 67-78.
3 镜像视觉反馈结合柔性机器人双手康复系统对皮层的协同即时激活:一项功能性近红外光谱研究
研 究 团 队
广州医科大学附属第五医院
欧海宁、林强团队
使 用 设 备
慧创NirSmart
背 景
镜像视觉反馈(MVF)已广泛应用于神经康复,但其相关机制仍需进一步分析。
方 法
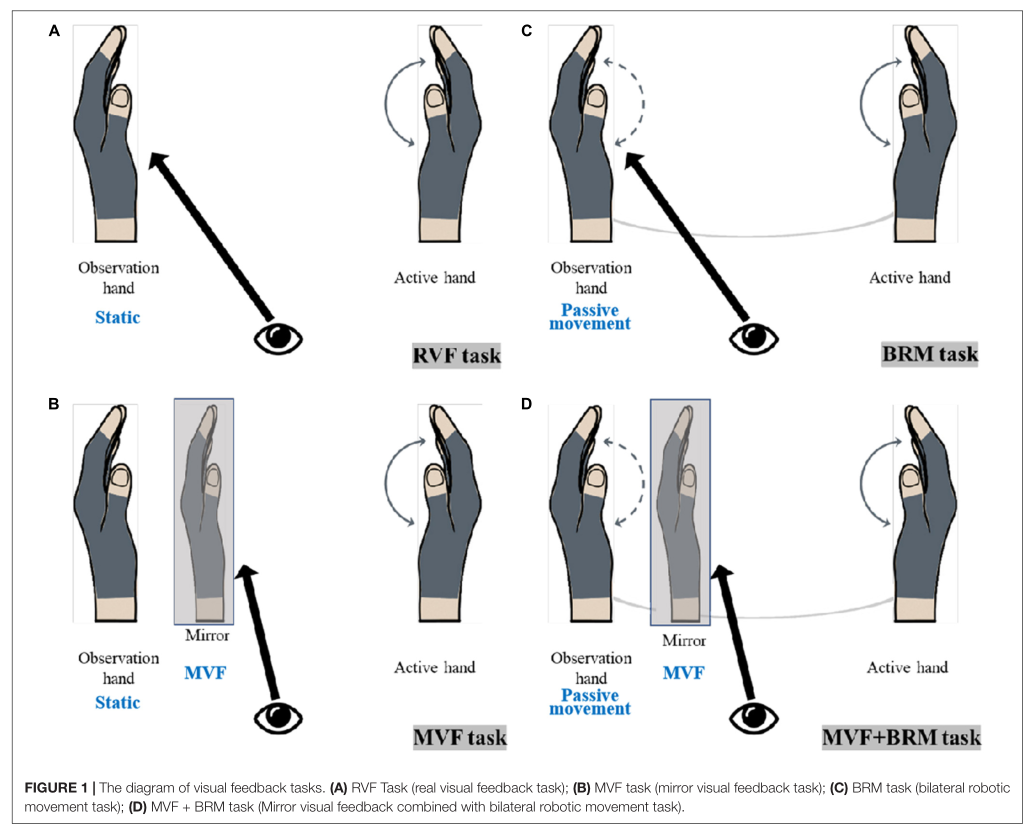
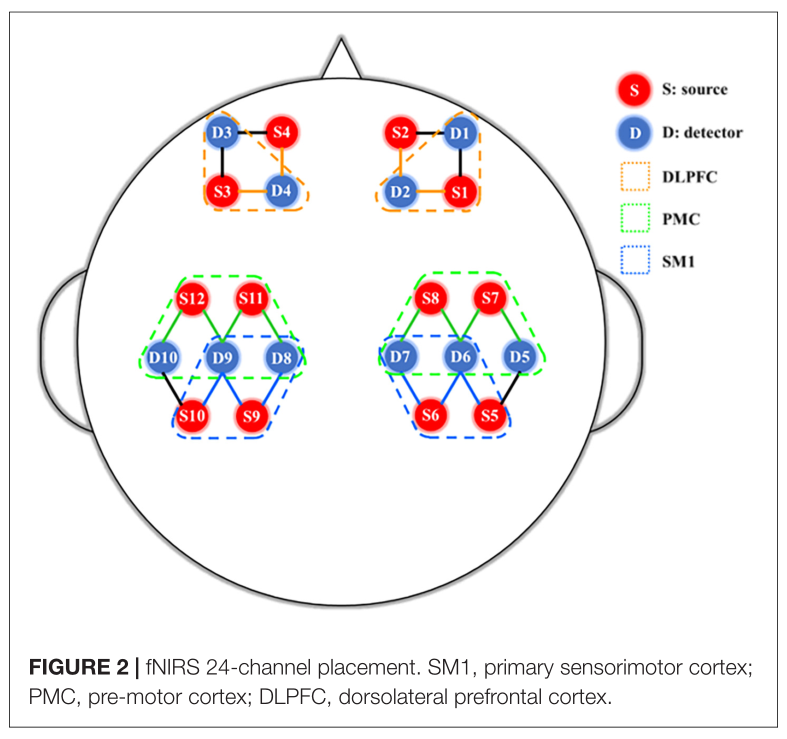
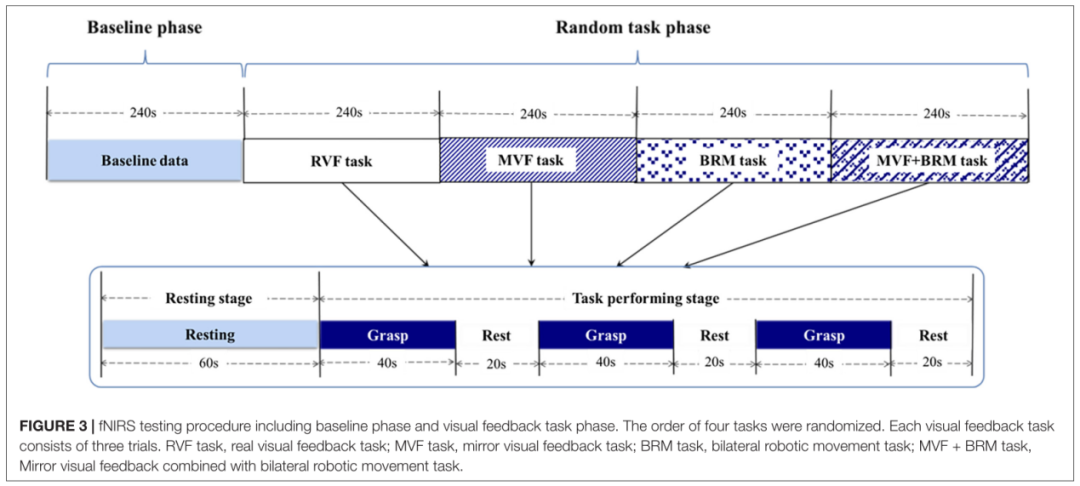
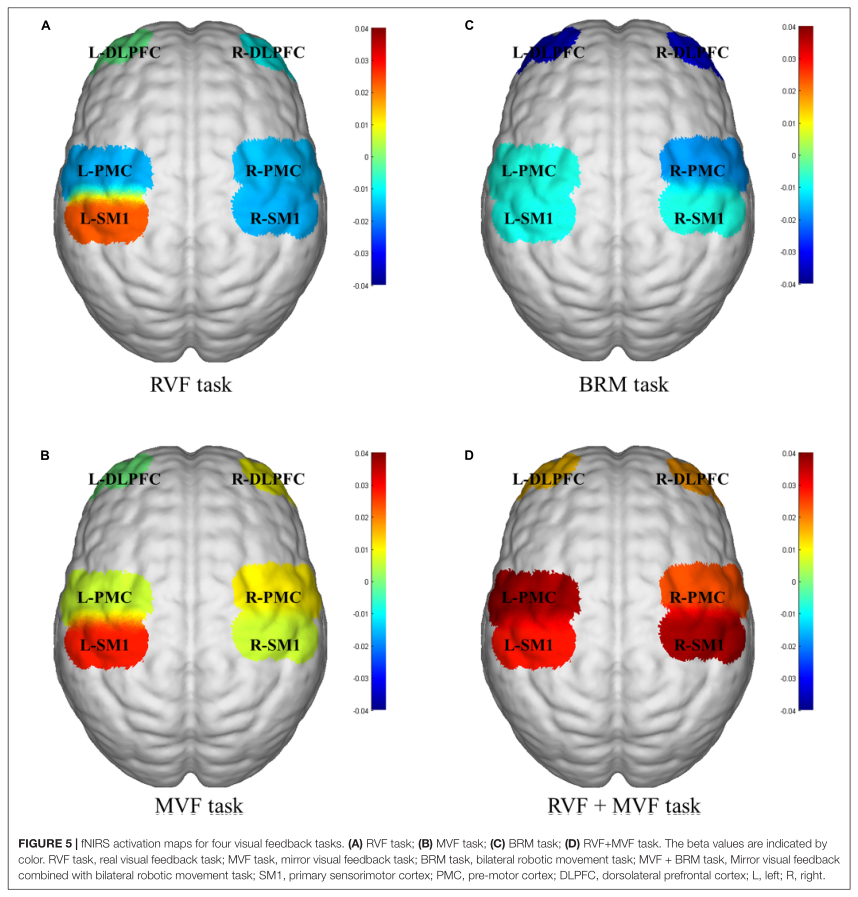
该自控研究招募了20名健康受试者(年龄22.15 ± 2.66岁),要求他们在同步功能性近红外光谱(fNIRS)监测下完成四种不同的视觉反馈任务。受试者的右手作为主动手(进行主动运动),左手作为观察手(静止或在柔性机器人双手康复系统下进行被动运动)。四种VF任务设计为RVF任务(真实视觉反馈任务)、MVF任务(镜像视觉反馈任务)、BRM任务(双手机器人运动任务)、以及MVF + BRM任务(镜像视觉反馈结合双手机器人运动任务)。
结 果
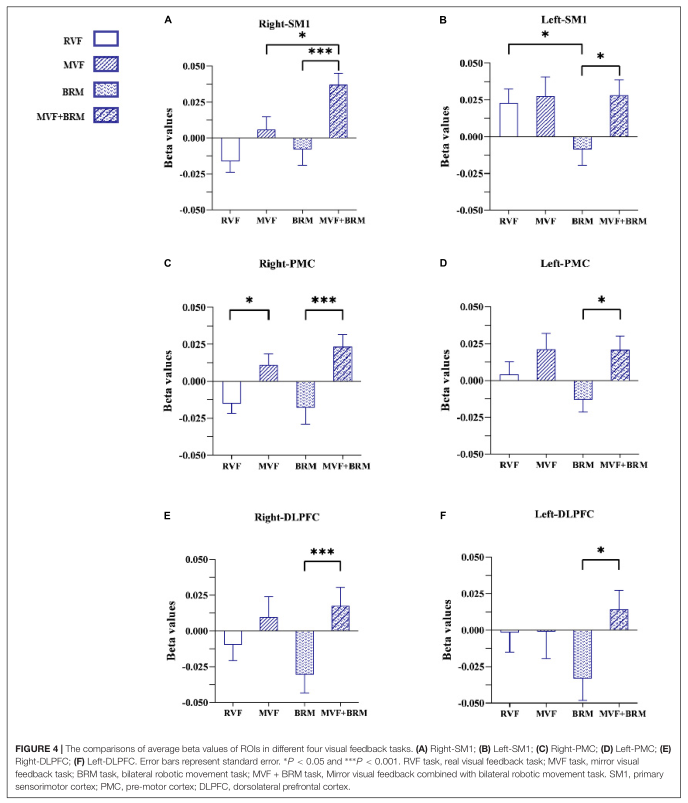
MVF任务中右侧前运动皮层(PMC)的beta值显著高于RVF任务(RVF任务:-0.015 ± 0.029,MVF任务:0.011 ± 0.033,P = 0.033)。MVF + BRM任务中右侧初级感觉运动皮层(SM1)的beta值显著高于MVF任务(MVF任务:0.006 ± 0.040,MVF + BRM任务:0.037 ± 0.036,P = 0.016)。
结 论
该研究首次通过同步fNIRS对健康受试者四种视觉反馈任务的皮层激活即时血流动力学进行了比较,结果显示MVF结合柔性机器人双手康复系统对皮层激活产生了协同增益效应,这可用于指导临床应用和未来的研究。
关 键 词
镜像视觉反馈、柔性机器人双手康复系统、功能性近红外光谱、皮层激活、协同增益效应
参 考 文 献
Qiu, Y., Zheng, Y., Liu, Y., Luo, W., Du, R., Liang, J., ... & Lin, Q. (2022). Synergistic immediate cortical activation on Mirror visual feedback combined with a soft robotic bilateral hand rehabilitation system: a functional near infrared spectroscopy study. Frontiers in Neuroscience, 16, 807045.
4 人机协作中对人类和机器人犯错的反应
研 究 团 队
清华大学 饶培伦团队
使 用 设 备
慧创NirSmart
背 景
在人机协作时代,绩效评估面临新的挑战。人类管理者会对人类与机器人员工的成功与失败表现出不同的反应吗?
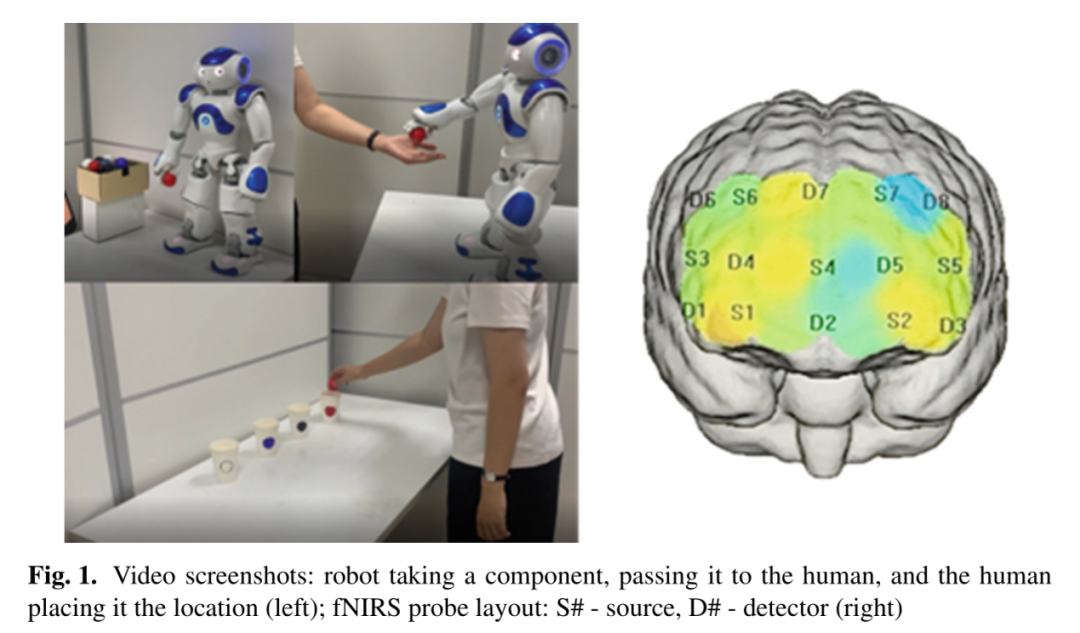
方 法
该研究旨在通过自我报告和神经影像技术探讨人们对人类与机器人成功与错误的反应。24名参与者被要求设想自己作为管理者,观看人机协作视频,并对视频中的人类和机器人员工进行评估。
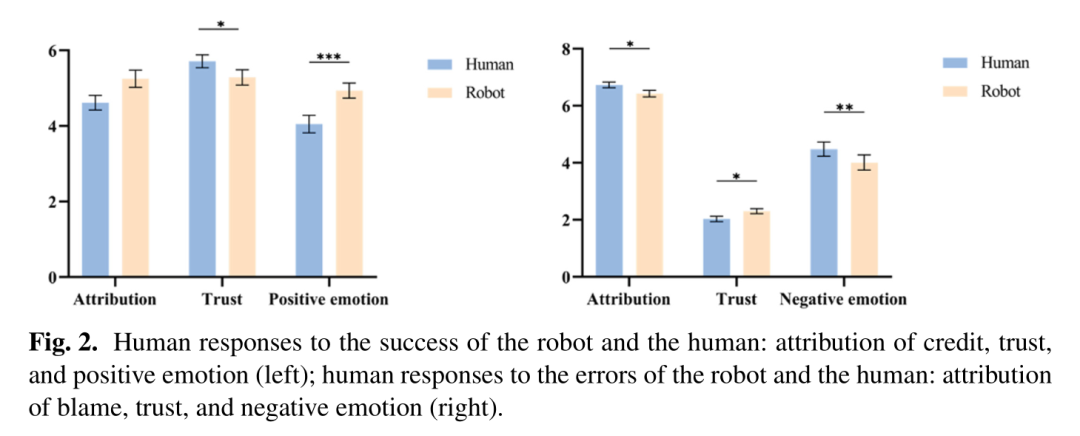
结 果
当员工表现正确时,如果员工是机器人,参与者给出的赞誉更多,且表现出更强的正面情绪;而当员工犯错导致失败时,如果员工是人类,参与者则给出更多的指责并表现出更强的负面情绪。此外,员工的错误会导致信任下降,且人类错误造成的信任损害高于机器人错误。此外,功能性近红外光谱技术的数据显示,观看机器人错误时前额叶皮层的激活减少。
结 论
这些发现从人类管理者的视角丰富了我们对人机协作中的归因、信任和情绪的理解,为实际管理提供了参考意义。
关 键 词
机器人、人机协作、归因、信任、情绪、fNIRS
参 考 文 献
Liu, F., Ji, Y., Lei, X., & Rau, P. L. P. (2024, June). Responses to Human and Robot Errors in Human‒Robot Collaboration: An fNIRS Study. In International Conference on Human-Computer Interaction (pp. 273-286). Cham: Springer Nature Switzerland.


















 460
460

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









