






 本文介绍四旋翼飞行器的Matlab3D可视化仿真及反步控制器设计方法。通过Simscape实现飞行器姿态控制仿真,并设计反步控制器以达到精确控制目标。此方法比普通力学方程模式更加真实直观。
本文介绍四旋翼飞行器的Matlab3D可视化仿真及反步控制器设计方法。通过Simscape实现飞行器姿态控制仿真,并设计反步控制器以达到精确控制目标。此方法比普通力学方程模式更加真实直观。
四旋翼飞行器matlab 3D可视化仿真
Simscape仿真;
反步控制器backstep设计;
比普通力学方程的模式更真实直观;
四旋翼飞行器Matlab 3D可视化仿真与反步控制器设计
引言
在现代技术领域中,无人机已经成为了一个不可或缺的工具。无人机通过搭载传感器和计算机系统,可以实现对于某些信息的快速获取和处理。而四旋翼飞行器则成为了无人机中的一个重要类别。在四旋翼飞行器中,通过四个电机的控制,可以实现对于飞行器在3D空间中的姿态控制。因此,四旋翼飞行器的研究可谓是非常重要的。
本文将着重介绍四旋翼飞行器Matlab 3D可视化仿真与反步控制器的设计。我们将通过Simscape仿真和反步控制器的设计,实现比普通力学方程的模式更真实直观的四旋翼飞行器仿真。
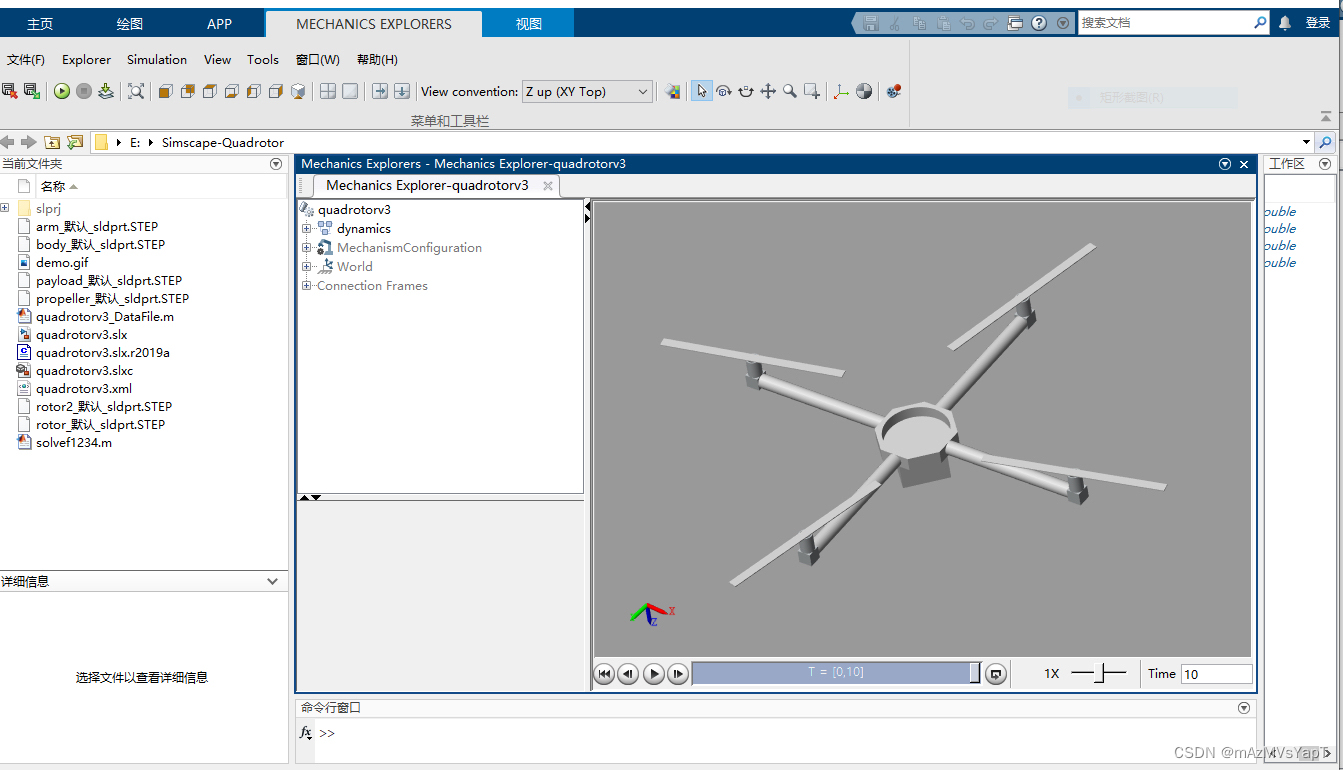
四旋翼飞行器Matlab 3D可视化仿真
为了实现对于飞行器的姿态控制,我们首先需要对于飞行器在3D空间中的运动进行建模。在建模过程中,我们可以通过建立四旋翼飞行器的动力学模型和运动学模型,确定飞行器所受到的外界力和力矩,从而实现姿态控制。
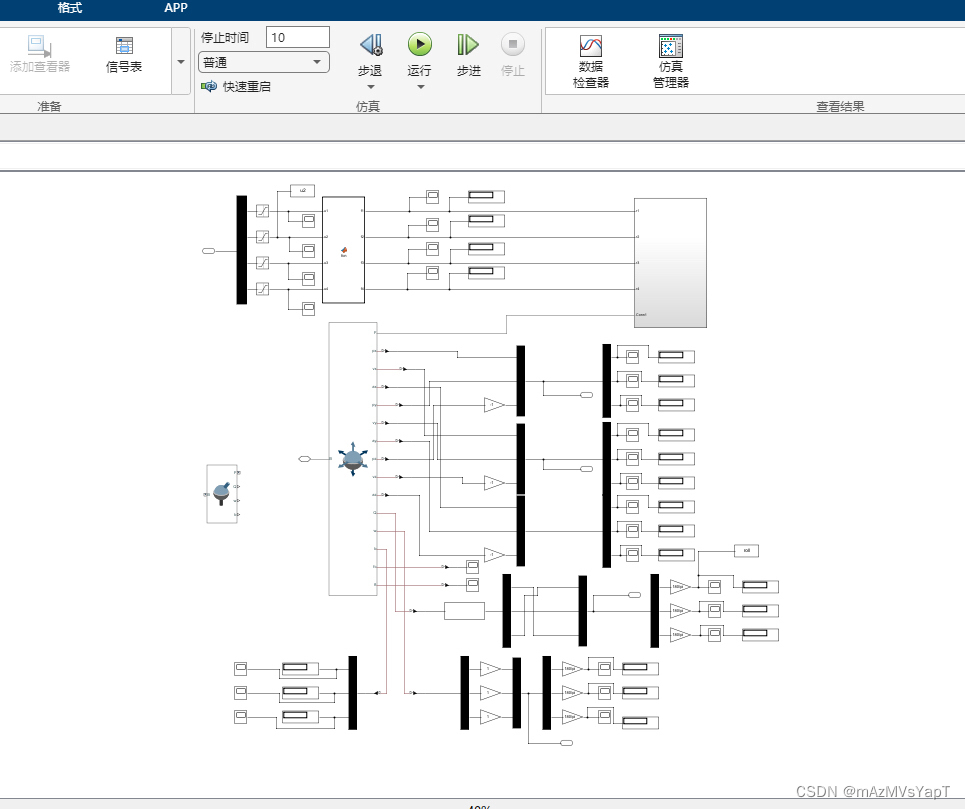
在建立模型后,我们需要通过Matlab的Simscape仿真工具对于飞行器进行仿真。Simscape仿真工具可以将我们建立的模型转化为仿真模型,并且通过仿真可以模拟出飞行器在3D空间中的运动轨迹和姿态变化。在仿真过程中,我们可以调整不同的参数,包括飞行器的质量、电机的功率、控制环节设置等,对于飞行器的运动进行仿真分析。
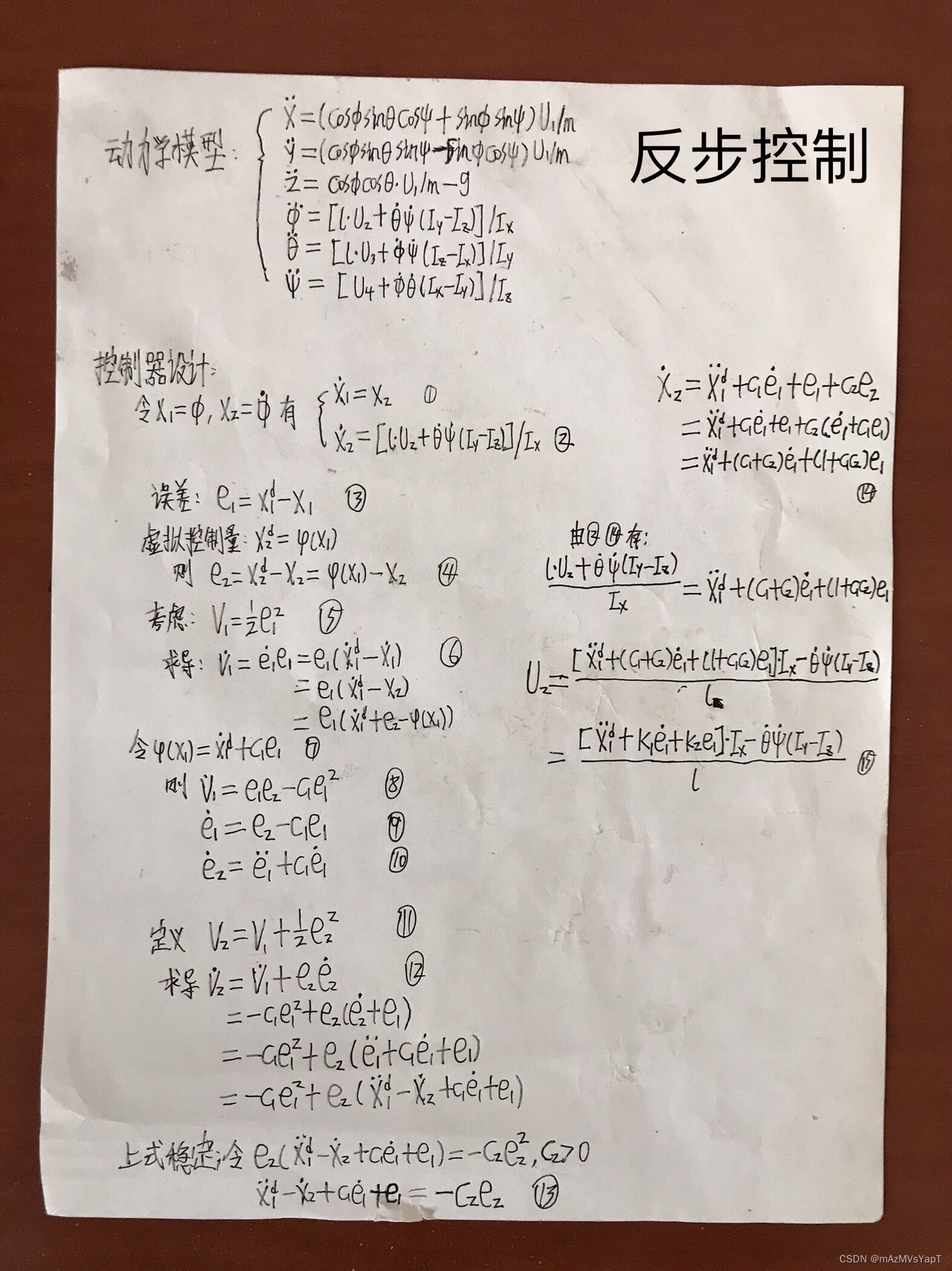
反步控制器设计
在确定了飞行器的运动模型后,我们需要设计相应的控制器来实现对于飞行器的姿态控制。在本文中,我们将采用反步控制器来对于飞行器进行控制。反步控制器是一种非线性控制器,相较于传统的线性控制器,其能够更好地应对非线性系统,并且能够实现非常好的控制效果。
反步控制器的设计过程主要包括如下几个步骤:
- 系统建模
在控制器设计之前,我们需要确定飞行器的状态空间模型。通过状态空间模型,我们可以确定飞行器在不同状态下的状态变化规律。
- 控制目标设定
通过确定控制目标,我们可以将飞行器的姿态变化转化为控制目标的变化。在本文中,我们将控制目标设定为飞行器在3D空间中的欧拉角度。
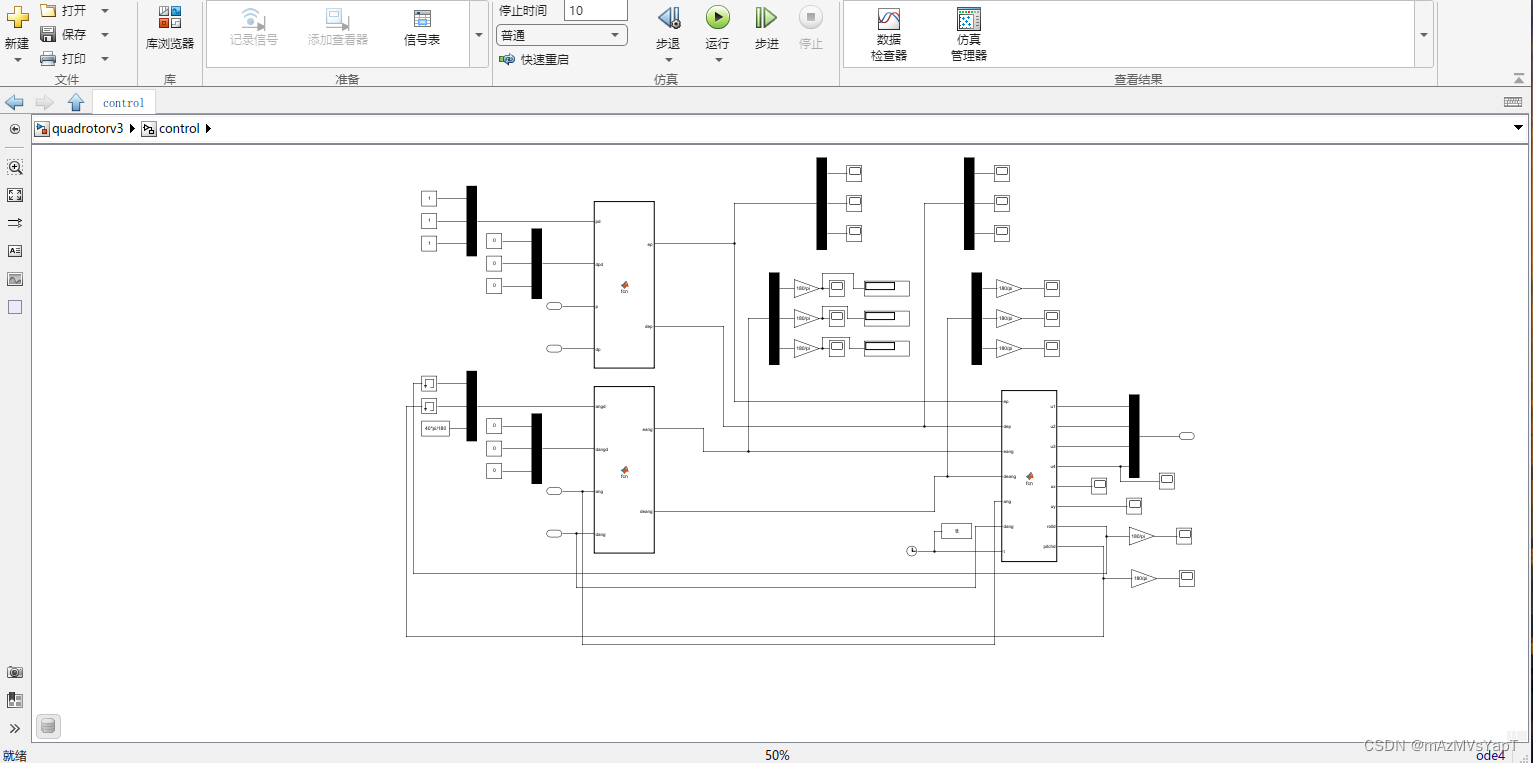
- 控制器设计
通过反步控制器的设计,我们可以将飞行器的状态从当前状态逐渐调整到目标状态。在设计过程中,需要考虑到控制器稳定性和趋近性。
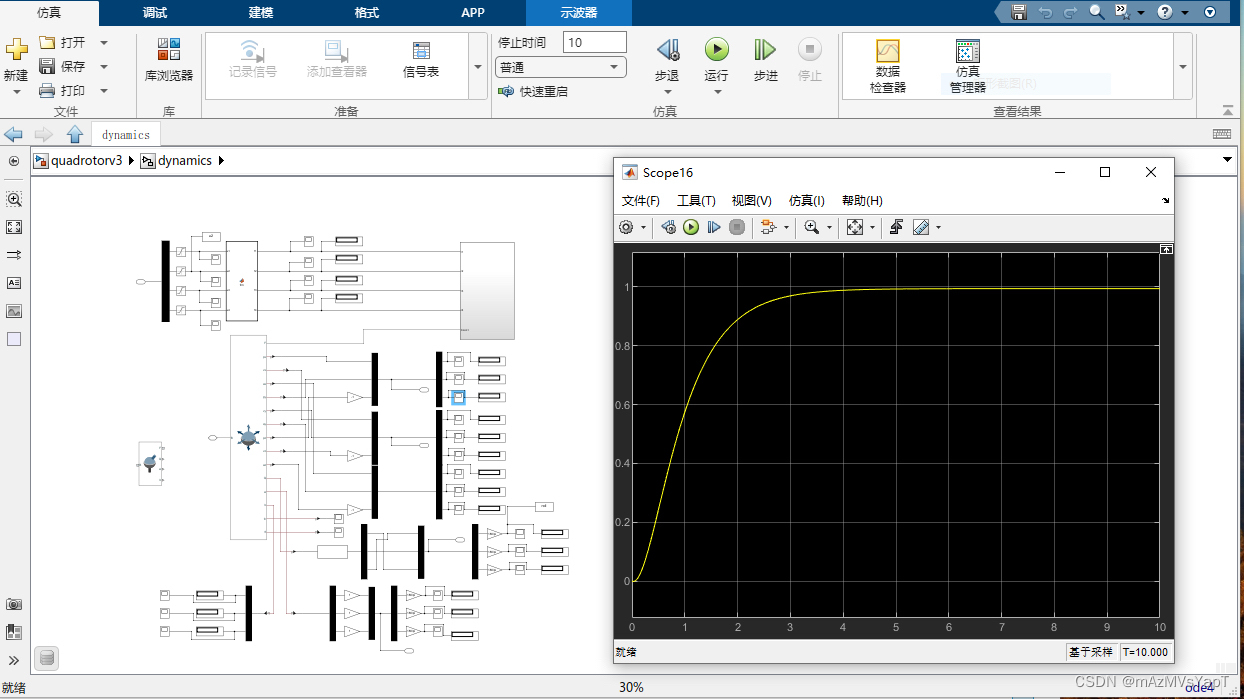
比普通力学方程的模式更真实直观
通过上述的四旋翼飞行器Matlab 3D可视化仿真和反步控制器设计,我们可以实现比普通力学方程的模式更真实直观的四旋翼飞行器仿真。在仿真过程中,我们可以观察到飞行器在3D空间中的运动轨迹和姿态变化,并且可以针对不同的环境参数进行仿真分析。
结论
本文通过介绍四旋翼飞行器Matlab 3D可视化仿真和反步控制器设计,实现了比普通力学方程的模式更真实直观的仿真效果。在实际应用中,本文的方法可以为飞行器的控制和指导提供参考,也可以为无人机领域的研究提供有益的参考。
相关代码,程序地址:http://lanzouw.top/674588394438.html


















 4267
4267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









