






两台欧姆龙CP1H相互通讯交换数据通过脉冲控制6轴伺服案例,实际项目。
PLC采用两台CP1H—X40D带RS232通讯板CP1W-CIF01.使用PC LINK主从通信。
OMRON触摸屏是NB7W-TE00B.
三菱伺服采用5台MR-J4和一台MR-JE。
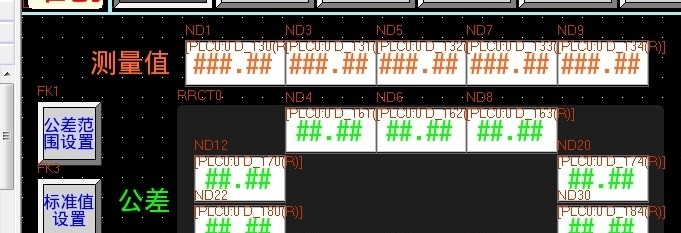
位置传感器采用KEYENCE GT2-500加通讯单元DL-RS2A。
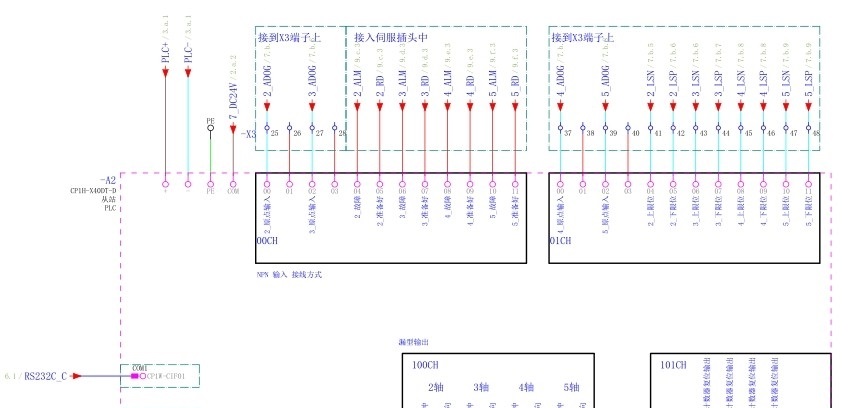
PDF图纸,
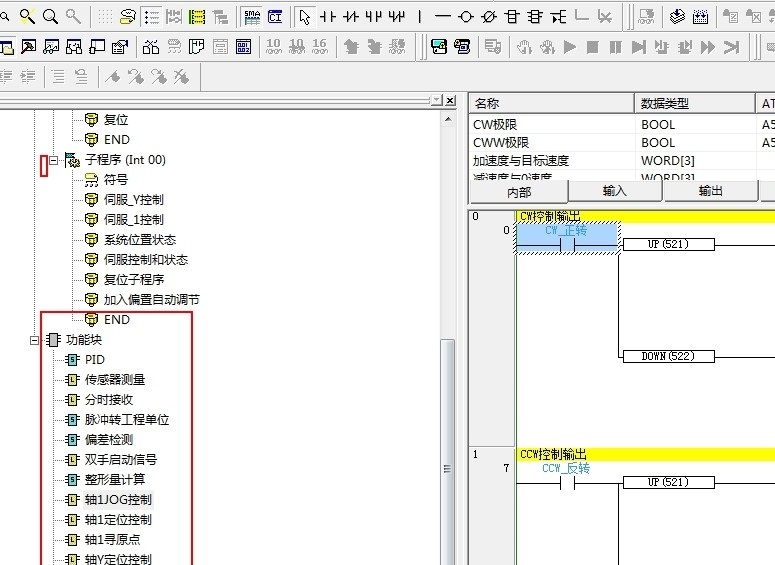
程序大量采用功能块设计和结构文本语言ST.适会你重复使用。
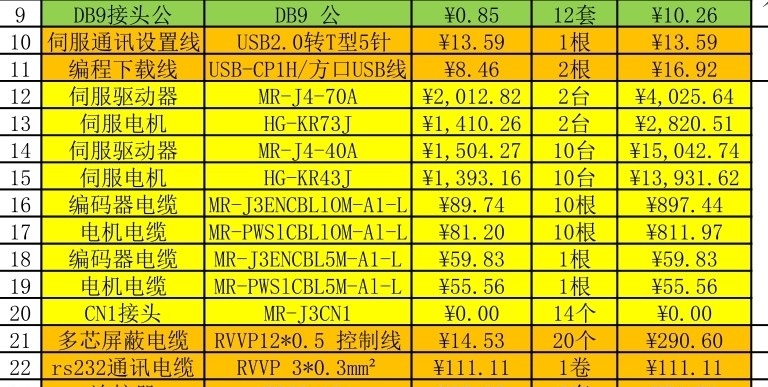
包含PLC程序,触摸屏程序,PDF电气图纸,采购BOM.
ID:8315666273143158
苏州电气老师傅

标题:欧姆龙CP1H与三菱伺服相互通讯交换数据的实际项目案例
摘要:
本文将介绍一个实际项目案例,展示了两台欧姆龙CP1H与三菱伺服的相互通讯交换数据的过程。通过采用脉冲控制6轴伺服,PLC采用两台CP1H—X40D带RS232通讯板CP1W-CIF01,使用PC LINK主从通信,OMRON触摸屏NB7W-TE00B,以及三菱伺服5台MR-J4和一台MR-JE,位置传感器采用KEYENCE GT2-500加通讯单元DL-RS2A。本文还将介绍程序设计中采用的功能块设计和结构文本语言ST的重要性,并附有PLC程序、触摸屏程序、PDF电气图纸和采购BOM。
关键词:欧姆龙CP1H、三菱伺服、通讯交换数据、脉冲控制、PLC、触摸屏、位置传感器、功能块设计、结构文本语言ST、实际项目案例
正文:
一、项目背景
在工业自动化领域,PLC和伺服系统的相互通讯交换数据是非常常见的一个需求。本文介绍的项目是基于两台欧姆龙CP1H和五台三菱伺服的实际应用案例。通过脉冲控制6轴伺服,实现了精确的运动控制和位置检测。
二、硬件配置
在本项目中,我们使用了两台欧姆龙的CP1H—X40D型号,并配备了RS232通讯板CP1W-CIF01,通过PC LINK主从通信实现了PLC之间的数据交换。此外,我们还采用了OMRON的NB7W-TE00B触摸屏作为人机界面,使操作更加方便。伺服系统方面,我们选择了三菱的MR-J4和MR-JE系列伺服,共计使用五台。位置传感器采用KEYENCE GT2-500,并配备了通讯单元DL-RS2A。
三、程序设计
在本项目中,我们采用了功能块设计和结构文本语言ST来进行程序设计。功能块设计的好处是可以将代码模块化,提高代码的可读性和可维护性。结构文本语言ST具有更高的灵活性,能够更好地适应项目需求的变化。此外,我们还使用了大量的PDF图纸,方便项目的电气布局和搭建。
四、实际应用案例
本项目的实际应用案例是通过PLC控制伺服系统实现精确的运动控制和位置检测。通过PLC与伺服系统的通讯交换数据,实现了轴的同步控制,使得系统能够按照预定的路径进行精确的运动。同时,通过触摸屏界面的交互,操作人员可以方便地控制和监控系统的运行状态。
五、总结与展望
通过本次实际项目案例的介绍,我们展示了PLC与伺服系统相互通讯交换数据的过程,并通过脉冲控制6轴伺服实现了精确的运动控制和位置检测。同时,我们还介绍了在程序设计中采用的功能块设计和结构文本语言ST的重要性。希望本文能够对读者在类似的项目中提供一定的参考和帮助。
参考文献:
暂无。
相关的代码,程序地址如下:http://nodep.cn/666273143158.html
















 3496
3496

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









