






抽象
摩擦电纳米发电机(TENGs)被提出来作为自供电电子设备的最先进的能量清除技术,但是由不可避免的摩擦驱动的严重磨损和退化可能会带来显着的耐用性和可持续性问题。在这里,据报道,一系列超细纤维在面内滑动和垂直接触分离模式下都具有坚固耐用和可持续的TENG功能,具有高达20 V的出色电势和3000的高循环性。这种微刷滕(MB-TENG)在柜台材料上的设计灵活性有助于进一步改善电输出,有利于人类交互式摩擦电能化的众多应用。值得注意的是,这些MB-TENGs为成功驾驶智能手表和肌电图模块提供了足够的输出功率。该技术采用简单且经济高效的方式提供强大可靠的单片TENG模块,有望在不久的将来成为自供电电子设备的有前途的能量收集源。
1 引言
物联网(IoT)技术正在新兴化,在智慧城市中发挥着至关重要的作用,先进的电子产品在智能城市中交换信息,而无需人为干预。尽管物联网有望丰富人类的生活,但该技术预计将遇到通过网络连接的数十亿先进电子设备的巨大功耗问题。满足能源需求的努力集中在开发替代供电技术上,该技术以独立,可持续和免维护的方式收集废弃的能源资源。特别是用于机械能量收集的装置,包括压电和摩擦电纳米发电机(PENG[1-7]和 TENGs,[7-13]分别)——鉴于机械能无处不在,引起了相当大的关注。事实上,与传统的能量收集技术相比,TENG具有许多优势,包括重量轻,制造简单,材料选择多样性和高能量转换效率。[15~16]然而,由于TENG是基于接触电气化和静电感应的工作机理,不可避免的摩擦导致接触区域层表面之间的严重磨损,从而导致循环中输出功率的显着下降。
[18~20]与其他可再生能源收集技术相比,工作机制固有的较低耐用性和可持续性严重影响了TENGs的竞争力。[21]应用TENG的一些常见工作环境,例如灰尘,水分和温度的增加,可能会加速机械磨损。[22~27]因此,迫切需要在重复机械刺激过程中表现出鲁棒性和韧性的TENG。此外,TENG对操作环境的微小控制通过采用不寻常的接触式电气化机制和对特定材料系统的关键影响,扩大了其在具有可变表面形状的结构配置中的应用范围。[26]使用各种方法(包括非接触模式),在TENG的鲁棒性和可靠性方面取得了进展,[票价:29、30 元]轧制结构,[票价:31、32 元]液-固接触,[票价:33、34 元]自我恢复,[票价:20、35 元]并封装了 TENG。[票价:36、36 元]同时,提高TENG耐久性的一条简单明了的途径是使用合适材料的结构设计方法。与相同弹性载荷下的单片表面相比,刷式表面的设计可提供稳定可靠的接触。[38]在最近的一份报告中,毫米长的毛皮刷被介绍为一种轻质,柔软和低磨损的摩擦电材料,用于具有高弹性,改进的稳定性和相对较高的密度的有趣TENG。[39]与传统的单片设计相比,这些刷子具有以下抗摩擦功能:1)增加接触面积,2)接触电阻更小,3)耐磨性高,4)产生的热量更少,以及5)相对较高的弹性。因此,用刷子改性的摩擦表面是耐用TENG接触式电气化组件的有希望的候选者。
在这里,我们报告了一种坚固可靠的新型TENG,其表面采用一系列超细纤维制成,利用刷子的内在结构优势。在支撑物中实现的超细纤维束阵列(即6×6,36针束阵列)显示出出色的弹性和灵活性,即使在大变形时也能提供较大的接触面积而不会发生任何设备故障。我们的TENG在单独的工作模式下表现出非凡的机械能量收集能力,包括平面滑动和垂直接触分离。使用我们的TENG进行人体交互式摩擦电热化,显示出出色的发电量和耐用性,这表明我们的TENG可以作为各种手持电子设备的电源。
2 结果和讨论
我们基于微刷的TENG(以下简称MB-TENG)的微刷结构包括一系列植入带有电导线的支架中的超细纤维束,如图1a所示。超细纤维束(即尼龙)从市售的短切纤维束移植到针状网格阵列插座(即支架,3D打印聚乳酸(PLA))中,其中电触点使用Ag糊在框架结构的表面上预涂,如图1b所示。通过固化Ag浆料,将每束纤维紧紧地插入并固定在导电插座上,而束的另一侧则作为独立式固定,从而允许在此几何结构内具有多个自由度(图1b)。完全集成的 MB-TENG 设备模块在给定区域(20 × 25 mm)内≈ 1980 微纤维2),如图 1c 所示。通过扫描电子显微镜测量的单个超细纤维的表面表现出粗糙的形态,通过扩大有效接触面积来促进接触电气化。如图1d中手动计数,阵列中的超细纤维的典型平均长度为≈9-10 mm,平均直径为≈197.6μm。除了单个超细纤维的有利弹性外,所提出的刷子结构在弹性方面具有出色的机械耐久性,并且在TENG的操作中具有柔韧性。因此,结构新颖性使MB-TENG能够显着承受大范围的轴向变形(即,0–dΔ)通过扩大与计数器材料的接触面积(图1e);在各种轴向变形下,单个超细纤维束相对于透明基板的接触面积可以可视化(图S1a,支持信息)。代表性数字图像显示,随着轴向变形的增加,刚性玻璃和软聚(二甲基硅氧烷)基板上的接触面积明显增加(图S1b,支持信息)。控制配合材料的弹性特性是产生大接触面积的关键因素,定量分析显示,增加的接触面积,变形增加,最高值为≈17.05 mm2对于≈70%的菌株(图S1c,支持信息)。
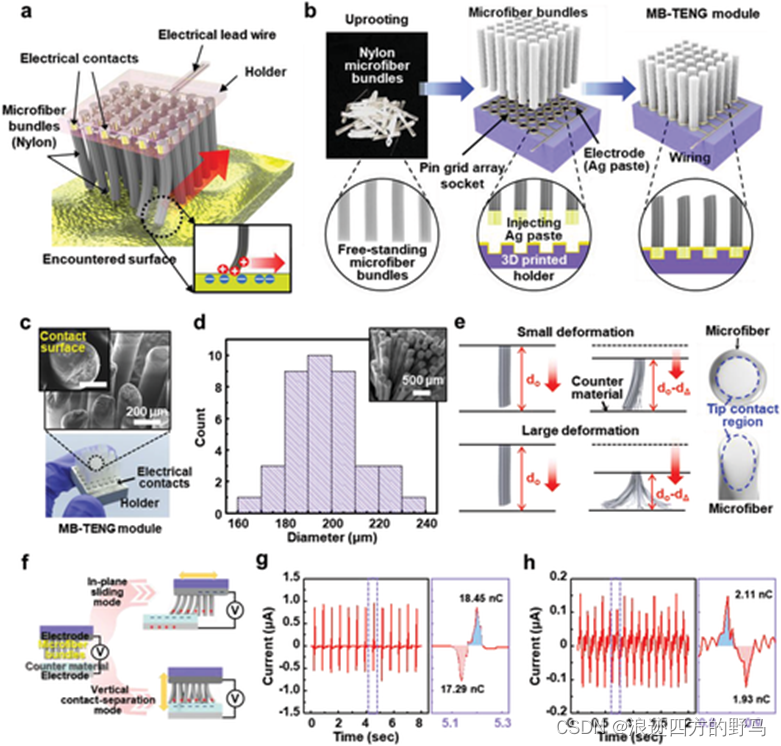
图 1
基于MB-TENG的能量收集系统的概念和设计。a) 产生摩擦电的MB-TENG组件的示意图。b) 利用短切纤维束和用导电银浆连接的针式栅格阵列插座生产MB-TENG的制造工艺;为每个制造过程提供了相应的横截面图像(底部)。c)超细纤维表面形态的SEM图像(插图:放大的粗糙表面,比例尺= 100μm)作为摩擦电热的接触区域,以及完全集成的MB-TENG模块(底部)的照片。d) 表示 TENG 模块中捆绑的微刷的直径分布的直方图。e) 偏转的单根超细纤维,尖端接触,与轴相关变形;通过增加的接触面积,可以将接触区域定义为椭圆形。f) MB-TENG与计数器材料集成,可实现两种不同的工作模式。g,h) 代表输出电流(左)和传输电荷,根据电流峰值(右)计算,其中分别测量面内滑动模式(g)和垂直接触分离模式(h)。
与单个超细纤维束相比,超细纤维束的6×6引脚阵列上的应力 - 应变响应的典型力学测试显示在支持信息中的图S2中。与单个引脚模块相比,捆绑的超细纤维的阵列结构表示最大压应力高出≈1.5倍,并且通过应力-应变曲线的积分计算出的弹性模量测量为E数组= 14.9 百万米米−3和 E单= 9.5 百万米米−3.特别是,即使在应力消除后,刷子结构也没有表现出任何永久性变形。这些独特的结构特性将极大地有利于材料设计对摩擦电热化效果的影响,并且主要是由于刷子结构具有显着的弹性和柔韧性,这也通过弹性变形单独排列的超细纤维的形状来最大化接触面积。[40]
MB-TENG的摩擦电可与沉积在Al电极上的计数器材料重复接触(图1f),分为两种不同的工作模式。首先,MB-TENG中的尼龙(即超细纤维束的引脚)用作摩擦电活性材料,可以通过平面滑动模式与计数器材料摩擦。由于尼龙是摩擦电系列中最积极的材料之一,因此在与反材料接触时,其表面通常倾向于使电子离域。因此,当刷束在滑动过程中与计数器材料接触时,在刷子和计数器材料的表面上分别对称地形成等量的正电荷和负电荷。一旦MB-TENG开始沿着柜台材料的表面滑动,移动刷子就会保持在固定柜台材料的不充电区域上方。然后,电刷和配电材料表面之间的电荷不平衡会感应到两个电极之间的电势差,导致电子流过外部电路。当MB-TENG继续滑动时,电刷被放置在对应材料的带电区域,从而电荷平衡驱动反向电子流,从而导致交流电到外部电路(图S3,支持信息)。与聚四氟乙烯(PTFE)薄膜接触的代表性输出电流在3 m s的滑动速度下显示0.88 μA−1(图1g)。电感应电荷的值是通过两个单输出电流峰值Q的积分计算得出的极化= 17.29 nC 和 Q 值去极化= 18.45 nC,表明在滑动过程中观察到的电荷损耗可以忽略不计。在垂直接触分离过程建立的第二种工作模式下,压缩和释放刺激驱动尼龙微刷和计数器材料之间的周期性电气化,从而产生交流电(图S3,支持信息)。作为代表性案例,在70 N的压缩负载下,在接触分离模式下获得0.12 μA的输出电流(图1h)。事实上,我们观察到类似的极化和去极化电荷,这意味着测量设备的静电贡献可以忽略不计。
使用自定义测量设置对MB-TENG模块在滑动模式下的主要特征进行了彻底评估(图2a),其中精确控制初始接触面积,通过调整MB-TENG与计数器材料之间的距离来保持微纤维之间的不连续接触(图2b).MB-TENG安装在固定支架上,使用编程直线电机将计数器材料向MB-TENG的平面方向移动,如图2c中的真实照片所示。在这种测量配置中,我们使用配备电流前置放大器的示波器分析电输出。MB-TENG模块产生的输出电压可以通过不同的参数进行调整,例如初始接触面积,滑动速度以及阵列和计数器材料的数量。例如,在PTFE计数器材料的情况下,图2d中的结果显示,通过将接触面积(即负载距离)增加到≈240 mm的接触面积,输出电压增加到≈17 V的最高值。2在 3 m s 的恒定滑动速度下−1.如前所述,缓慢的滑动速度(0.5 m s−1在相同的实验条件下,由于滑动速度的提高逐渐提高了输出电位,因此输出电位最低,为≈3 V(图2e)。在该实验中,我们发现MB-TENG的电势分布高度依赖于面内位移。使用 COMSOL Multiphysics 计算物理场 (D) 中物理场的电气化,并将其可视化为图 2f 所示的位移 (D),其中输出电压在 25 mm 的位移下达到最大 ≈4.3 kV。尽管仿真中的电势远大于实验结果,但这可能是由于测量的输出电压的非理想开路条件,[41]值得注意的是,超细纤维束的平面内偏移会产生MB-TENG和计数器材料之间的电极化。为了验证MB-TENG的内阻,使用不同的电阻研究了与PTFE计数器材料接触的输出电压和电流,如图2g所示,其中在0.3 GΩ的负载电阻下收集最大功率为7.96 μW(图S4,支持信息)。单束 MB-TENG 模块的输出在 ≈240 mm 的初始接触面积下为 ≈0.3 V2在 3 m s 的滑动速度下−1,这是通过将超细纤维束的数量增加到36个柱状束阵列而实现的≈55倍的改进结果,如图2h所示。这可能是由于每个微纤维束作为充电泵的插层相互作用,因此当来自超细纤维束的极化和去极化过程在滑动模式下同步时,输出电压是一个建设性的积分状态。此外,MB-TENG在重复滑动模式(D = 25 mm)下的长期稳定性也经过了严格测试。如图2i所示,即使在3000次循环后,与初始阶段相比,电压水平似乎也很稳定,这表明MB-TENG模块具有出色的耐用性和鲁棒性。此外,通过改变计数器材料,测试了滑动模式下产生的输出电流和电压,以确认MB-TENG的多功能性,如图2j所示(另见图S5,支持信息)。每个样品上输出电流和电压的产生水平与摩擦电系列的趋势非常匹配,[票价:42、43 元]而柜台材料的表面粗糙度是一个关键因素。与一系列计数器材料接触时产生的足够电输出电压水平表明,我们的MB-TENG可以应用于便携式电子设备,以方便地产生摩擦电,从而促进粗糙或明显光滑表面的摩擦。
图 2
MB-TENG滑动模式的表征。a) 测量设置示意图。b) 滑动模式MB-TENG与计数器材料接触时的放大侧视图示例,表示在可调垂直距离下滑动的能力。c) 测量装置中配备的MB-TENG的真实数字图像。d,e) 典型MB-TENG模块在10%~50%不同应变下输出电压,滑动速度为3 m s−1和50%的应变在不同的滑动速度。f) COMSOL 在不同分离距离下对 MB-TENG 的仿真结果。g) 输出特性取决于负载电阻。h) 各具有代表性的输出电压性能随着MB数量的增加而增加,i)输出电压在3000次循环运动中长期稳定。j) MB-TENGs的输出电流与各种类型的计数器材料相匹配。k) 单电极模式下规则对齐织物上的滑动MB-TENG模式的示意图,通过互锁超细纤维的横向侧(插图)来增强接触面积。l,m) 输出电压和电流由各种对齐结构上的滑动 MB-TENG 测量得出。n) 在15%~55%的不同相对湿度下测得的峰值电压值。
有趣的是,我们观察到,当计数器探头甚至与接地而不是对电极连接时,电输出几乎相同(图S6,支持信息),从而提供了设计灵活性以及TENG器件的扩展应用。我们假设,采用MB-TENG单电极模式的新材料设计概念将允许使用松散的织物计数器材料来实现电极的有限集成,如图2k所示。当MB-TENG在四种不同的织物上滑动时 - 羊毛,丝绸,聚醋酸乙烯酯(PVAc)(PVAc)和棉纤维 - 恒定滑动速度下的输出电压和电流的测量结果随着摩擦电表中对应材料的电子亲和力的增加而增加,棉花达到8.0 V和0.8μA(图2l,m和图S7b,支持信息)。值得注意的是,来自规则对齐织物的侧壁(即脊和凹槽)通过在MB-TENG的略微穿透的配置中联锁微纤维的横向来增强滑动模式下的接触区域,从而实现有效的摩擦电热化。作为一个简单的演示,当使用超声波加湿器控制相对湿度时,通过将相对湿度从15%增加到55%来明显降低电输出。很明显,水层的形成通常会导致摩擦电材料表面感应电荷的耗尽(图2n)。[44]
通过在垂直接触分离模式下将周期性压缩载荷施加到MB-TENG模块上,演示了摩擦电的下一个策略(图3a)。在MB-TENG和柜台材料之间安装了一组角落的弹簧垫片,以便在从啮合的压缩载荷中释放时保持≈10 mm的间隙。组装好的MB-TENG被放置在数字刻度上,并使用编程的直线电机精确调制超细纤维束的应变。与滑动模式的研究类似,几个测量参数(包括应变和负载频率)通过压缩释放的运动改变了电输出。图3b显示了接触分离过程中的一组典型输出电压电平,PTFE薄膜线性增加,应变从−10%增加到−50%,在−50%应变时达到1.2 V,因为接触面积被外部负载放大。另外,在施加的−50%应变负载下,不同频率的输出电压如图3c所示。在初始低频为3 Hz时输出电压为0.3 V,在4.5、6和7.5 Hz的频率范围内,输出电压分别增至0.4、0.5和1.2 V。在摩擦电强化过程中,这种频率依赖性并不奇怪,因为在某些条件下,电子流经外部电路的响应时间可能不够。[7]因此,在较高频率负载下,与较低频率负载时相比,电子流通过外部电路的松弛时间更短,从而增加了输出电压和电流信号。使用 COMSOL 根据触点长度 (L) 对开路配置中 MB-TENG 重复触点分离模式下的电势分布进行了仿真和可视化,如图 3d 所示。如前所述,当两个表面相互接触时,总表面电荷是平衡的。一旦两个表面被分离,就可以在每个表面附近产生电势。当L = 10 mm时,开路电压可以最大化至≈300 V,在100 MΩ负载下实验产生的最大功率为46.72 nW(图S8,支持信息)。在给定条件(即 7.5 Hz、5 mm)内,从 COMSOL 仿真中提取的电势趋势与实验中的测量值非常吻合(图 3e,f)。除了机器交互运动的摩擦之外,通过人体运动进行摩擦电增振的可行性可以扩展MB-TENGs的可行应用。因此,我们在配备与前面演示的相同弹簧垫片配置的MB-TENG上进行了手动攻丝测试(图S9a,支持信息)。发现由手动攻丝运动驱动的电输出比编程直线电机(即图S9b,c,支持信息中的31.2 V)大得多。此外,由没有表面浮雕结构的平面尼龙薄膜组成的TENG表现出相对较低的7.7 V输出性能,如图3g和图S10所示。如前所述,当相同的材料在摩擦表面上具有扁平形状以外的特征时,接触面积增加,从而提高了输出性能。[票价:14、45、46 元]这些结果表明,我们的MB-TENG表现出一种值得注意的人机交互能量收集装置,它代表了100 MΩ时26 μW的最大输出功率(图S9d,e,支持信息)。更重要的是,这种特性特别有利,因为刷子长期以来一直是用于清洁,梳理,化妆,绘画等的便携式常用工具。在这种情况下,使用各种其他计数器材料来获得更多信息,通过手动敲击操作产生相似或改进的电输出特性(图S11,支持信息)。此外,通过用摩擦电负极材料(聚(氯乙烯),PVC薄膜)覆盖框架结构(即支架,PLA)的顶面以从触摸的手收集更多电子,进一步增强了摩擦电性能,如支持信息中的图S12a中所述。令人惊讶的是,如图3h所示,使用MB-TENG模块与PTFE薄膜接触的输出电压和电流分别显着提升至1.6 kV和200 μA,其中最大输出功率为76.7 mW,负载电阻为100 MΩ,如图3i所示。通过应用其他常用的配合材料,如硅橡胶和聚酰亚胺薄膜,该策略揭示了类似的趋势(图3j和图S12b,支持信息)。
图 3
MB-TENG的接触分离模式的表征。a) 接触式分离模式MB-TENG的测量设置示意图,包括编程直线电机和组装的MB-TENG。b,c) MB-TENG在7.5 Hz频率下的不同应变下和在不同负载频率下应变的50%下的输出电压。d) COMSOL 模拟了 MB-TENG 中 MB-TENG 中 MB 与配合材料之间不同接触长度的电位分布。e,f) MB-TENG在与(b)和(c)相同条件下产生的电位差的计算和实验结果。g) 光纤和薄膜结构TENGs的输出电压比较(黑点:尼龙纤维,红点:尼龙薄膜)。h) MB-TENG在框架结构顶面上用PVC薄膜的输出电压和电流。i) MB-TENG在10 Ω至910 MΩ的不同外部负载电阻下测得的输出电压和电流,并计算出输出功率(图内图为测量系统的电路图)。j) 使用硅胶和聚酰亚胺薄膜的其他配合材料的MB-TENGs的输出电压。
图4a展示了MB-TENG的实际演示,用于将我们的方案扩展到人机交互设备模块。[47]前面描述的典型MB-TENG模块很容易安装在人体的不同位置 - 包括头发,衣服和鞋子上 - 以收集由任意人体运动驱动的摩擦能量。在这些演示中,通过选择和拟合MB-TENG模块的最佳工作模式,如图4b所示,电输出最大化;头发(平面内滑动),衣服(平面内滑动)和鞋子(垂直接触分离)。这种系统为便携式或可穿戴式能量收集提供了一个有效的平台,其中TENGs的可逆结构灵活性对操作至关重要。周期性运动收集的电能要么操作发光二极管(LED)阵列,要么存储在锂离子电池中,该锂离子电池为商业医疗保健设备供电,如肌电图(EMG)模块或智能手表,如图4c所示。图4e提供了面内滑动模式的相关数据,只需在轴向对齐方向上梳理长发,类似于在织物箱中测量的数据(见图2k)。因此,MB-TENG的这种不寻常的方法成功地分别获得了高达≈150 V和6 μA的输出电压和电流(图4d),从而产生了稳定的功率来点亮100个LED(图4e)。MB-TENG的另一种形式通过在机织物表面上手动摩擦应用于运动服(即聚酯材料),提供70 V和1 μA的电输出(图4f)。此外,基本的MB-TENG模块可以集成到鞋子的中底中,并作为可穿戴设备,通过身体运动进行自充电电源。测得的电势为≈50 V,行走和跑步的频率分别为0.45和1.7 Hz,如图4g所示。总体而言,我们通过在多个车身位置利用可转换的MB-TENG模块,成功地证明了足够的电能的收集。为了确保瞬时摩擦电的存储,使用了商用电容器,其中每个充电电容电压的单独电平在40秒(1μF)内显着增加到≈6 V,在250秒(10μF)内≈5 V,如图4h所示;由于电容器的固有特性,充电的能量在200秒内逐渐放电(图S13a,支持信息)。作为可靠地存储可收集能量的手段,使用锂离子电池(25 mAh),并在滑动模式下将电路与MB-TENG连接,将机械运动(即线性电机28小时,图S13b,支持信息)转换为小型电子设备的电源。尽管与最初制备的TENG模块相比,在长时间(即28小时)的重复摩擦后,特性输出降低了≈2-3 V(即性能仅下降了10-15%),但该实验清楚地证明了我们的MB-TENG器件的鲁棒性。相对而言,在这个阶段需要长时间的周期性运动,但可能的浪费的机械能量可以从其他可能的情况下收集。[15]同样,作为对可穿戴电子设备供电能力的简单测试,串联连接的四个10 F电容器(总容量:2.5 F)可以充电至3.7 V,然后用于驱动智能手表(图S13c,d,支持信息)。此外,一个具有代表性的医疗监测设备(即EMG模块)也使用由MB-TENG充电的锂离子电池进行操作,如图4i所示。在这里,将柔性肌电模块和表皮电极连接到前臂,并记录张开手掌和紧握拳头的手势信号并直接传输到智能手机(插图见图4i)。我们对可持续TENG模块的设计方法旨在阐明能源供应,这意味着未来在军事,机器人,娱乐和智能医疗等各种研究领域的潜在应用。[票价:48、49 元]
图 4
a) MB-TENGs作为人机交互设备的实际演示的概念图解。b)MB-TENGs的方案和匹配照片,以应用最佳工作模式:i)梳理头发,ii)扫地织物,以及iii)固定在鞋子下面。c) 利用从MB-TENGs收集的能量来点亮LED阵列,为锂离子电池充电或医疗保健监控。d) 从表壳(i)收集的输出电压和电流。e) 串联连接的 LED 阵列的电路图和实际供电演示,最多可点亮 100 个 LED。f) 根据情况(ii)的运动测量的输出电压和电流;插图显示了织物柜台材料的照片。g) 在行走和跑步过程中的输出电压,情况(iii)。h) 手敲MB-TENGs的电容充电行为;插图显示了由MB-TENG和电容器组成的电路图。i) 通过连续手势测得的肌电信号;插图显示了带有智能手机的肌电图模块和无线系统的照片。
3 结论
我们报道了一种简单而高效的基于微刷的器件,作为坚固可靠的TENG,它具有出色的性能,具有高达≈20 V的出色电势和≈3000的高循环性,在面内滑动和垂直接触分离工作模式下。所展示的MB-TENG直观简洁的设计和灵活性使各种形式的柜台材料(包括聚合物,金属和机织物材料)能够采用。此外,由于刷子长期以来一直作为一种常见的手持工具,制造的MB-TENG可以进一步应用于人体交互式摩擦电,以转换人体运动的能量。重要的是,市售的小型电子设备,如智能手表和柔性EMG模块,可以通过收集和储存来自身体运动的电力来成功供电,从而使MB-TENG能够用作通用的可穿戴能源。我们设想所提出的MB-TENGs在可穿戴电源中具有可行的潜力,不仅可以作为便携式能量收集设备,还可以作为传感器介质来解释人类活动识别和运动传感的信号;事实上,目前正在对微刷结构中的感觉系统进行系统研究。
4 实验部分
微刷腾(MB-TENG)的制造
MB-TENG的基本结构由一系列尼龙超细纤维束和3D打印的PLA支持者组成。为了构建刷子结构,从商用牙刷中提取尼龙超细纤维束,然后植入PLA支架(20 mm×25 mm),其中直径为≈2 mm,间隙为≈1.14 mm的孔径阵列在表面上进行3D打印。超细纤维束用银浆固定在支撑物上的孔阵列上。整个设备在给定区域内采用6×6个超细纤维束阵列。
电输出性能的表征
定制的机械测试系统由编程直线电机(LS Mechapion,APMC-FAL01AM8K)和灵敏刻度构成。MB-TENG安装在直线电机上,以检查摩擦电性能对滑动和压缩负载的影响。配备前置放大器 (SRS SR-570) 的示波器 (Agilent DSO-X-2014A) 用于低噪声电压和电流测量,同时监控 MB-TENG 的滑动和压缩负载。
特征
使用扫描电子显微镜(蔡司SUPRA25,5-10 kV),光学显微镜(奥林巴斯BX51)和数码显微镜相机(海尔,HY-2307)观察组成MB-TENG的捆绑和单个纤维的形态。使用CT纹理分析仪(AMETEK Brookfield)测量纤维束的应力 - 应变响应。
通过 COMSOL 进行数值模拟
为了计算微刷的摩擦电切化,在 COMSOL Multiphysics 中构建了直径为 2 mm、长度为 10 mm 的刷子阵列的 2D 模型,并与 MB-TENG 的实际尺寸相匹配。MB-TENG引入了0至10 mm的垂直位移和0至25 mm的水平位移。对于具有开路条件的电位分布仿真,尼龙纤维的表面电荷分别设置为2和20 nC,分别处于面内滑动和垂直接触分离模式。PTFE计数器材料上的总电荷分别设置为-2和-20 nC,分别处于面内滑动和垂直接触分离模式。
确认



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}
{kind=link}
{kind=link}
{kind=link}