









CAN与CANOpen(一)基本概念
CAN与CANOpen(二)报文格式
CAN与CANOpen(三)错误处理
CAN与CANOpen(四)CANOpen对象字典
CAN与CANOpen(五)PDO和SDO
CAN与CANOpen(六)网络管理和CAN FD
CAN(Controller Area Network, 控制器局域网络)是由博世开发的一种现场总线,首先应用在汽车领域。由于它的低成本和可靠性,现在被广泛应用在工业测控和工业自动化领域。由于工作的关系,自己接触CAN比较多所以总结一下分享给大家。
- 参考
-
CAN Specification 2.0, Part A
-
CAN Specification 2.0, Part B
-
CANopen 协议介绍
-
CiA Draft Standard 301
2. CAN与CANOpen的关系
下面是CAN协议与OSI网络模型的一个对比。CAN的物理层分了三层分别是MDI,PMA和PLS,数据链路层分了两层:MAC与LLC。这五层就是最原始的CAN协议,标准是ISO11898。也就是说CAN协议一开始是没有应用层的。后来有一种叫CANOpen的基于CAN的应用层协议被开发出来,标准是CiA301。
在实际开发CAN器件的时候不一定要用CANOpen,你可以根据自己的需要定制自己的应用层协议。
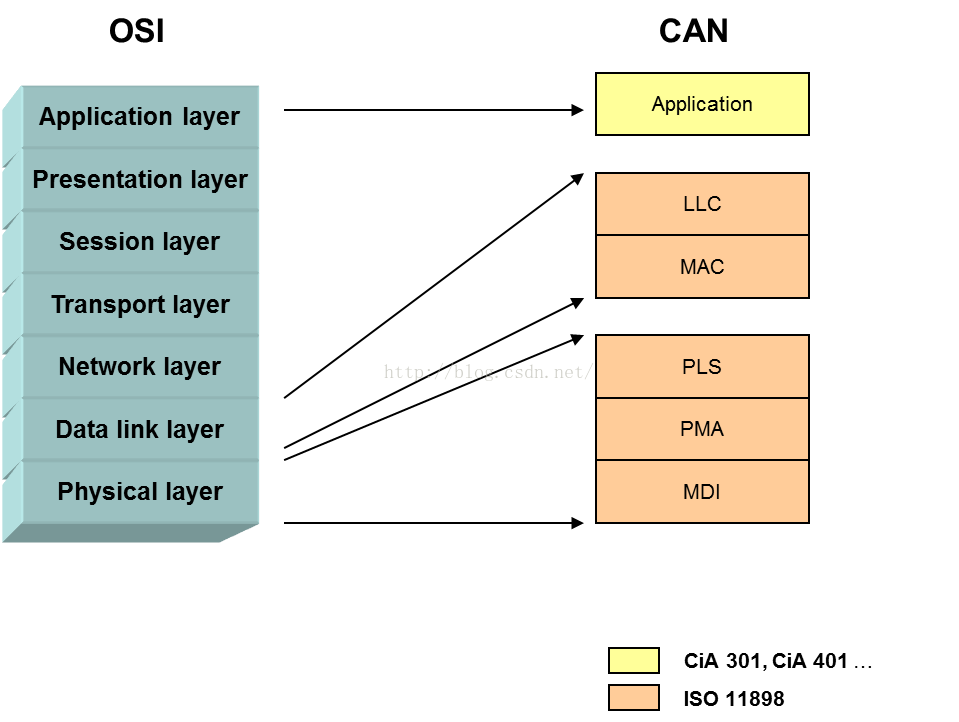
图1CAN与CANOpen的关系
下面会分别介绍CAN和CANOpen的内容。最后会介绍一下CAN的最新发展CAN FD。
- CAN的基础知识
本文对于CAN的介绍主要集中在数据链路层,对于物理层涉及很少。对于物理层感兴趣的读者可以访问[1]
3.1 显性与隐形
显性(Dominant)与隐性(Recessive)是总线上最基本的两个状态,也可以表示为“0”与“1”。在物理上它有两条线的压差表示。在隐形的时候,两条线的电压相同,压差为0。当压差超过一定的阈值的时候,总线的状态就变为显性。

图2显性与隐性
为什么叫显性和隐形?
假设在总线上挂了2个器件1,2.器件1将总线设为显性,而同时器件2将总线设为隐形。最终总线的状态会呈现为显性。所以当总线上的所有器件都为隐形时,总线的状态才为隐形。如果有一个器件为显性,则总线为显性

图3 CAN总线
3. 2 冲突裁决
当总线上的几个器件同时发送数据的时候,CAN总线必须决定哪个器件可以发送,而其他的器件必须等待。冲突裁决是CAN协议最重要的一个特性,也是CAN总线做的最漂亮的地方,用很小的成本就解决了这个问题。
总线上的每一个CAN器件都会有一个唯一的ID。ID的大小决定了器件的优先级。ID越小优先级越高。如果几个器件同时发送数据,ID小的优先发送。以下图为例,总线上有A,B,C三个器件。A首先发送数据。当总线上有器件发送数据时,其他器件只能处于监听模式,所以B,C虽然有发送数据的需求但是只能等待A发送结束。当A发送结束之后,B,C同时发送,但是B的ID更小,B优先发送。B发送结束之后C才可以发送
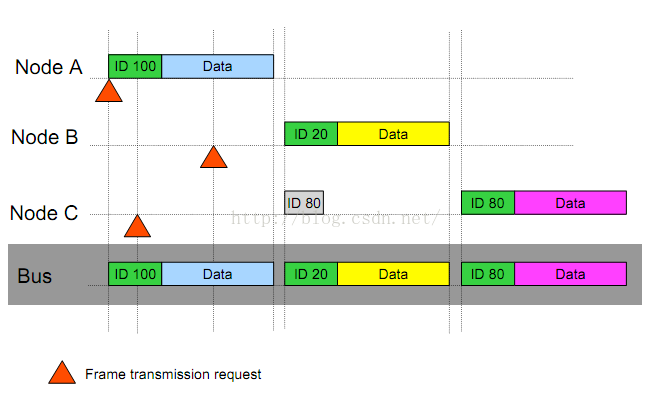
图4冲突处理与Node ID
下面说明一下当几个器件同时发送时CAN总线是如何做裁决的。
以下图为例。总线上有器件A,B,C,D。A,B,C同时发出SOF位为显性。而D为隐形,当它发现总线上的状态与自己的状态不一致时,D就进入监听状态。A,B,C继续发送数据。发送到ID的第5位时A,C为显性,B为隐形。B检测到总线的状态于自己的状态不一致,进入监听状态。A,C继续发送数据。这也说明B的ID比A,C要大。当发送到ID的第1位时A为隐形,C为显性,A进入监听状态。C继续发送。最终ID最小的C发送成功,A,B只能等待C发送完成之后再进行发送。然后A会发送成功,B等待,最后才是B发送。从上面的裁决过程可以看出,对于C来说,它的数据发送没有因为冲突而产生延迟。
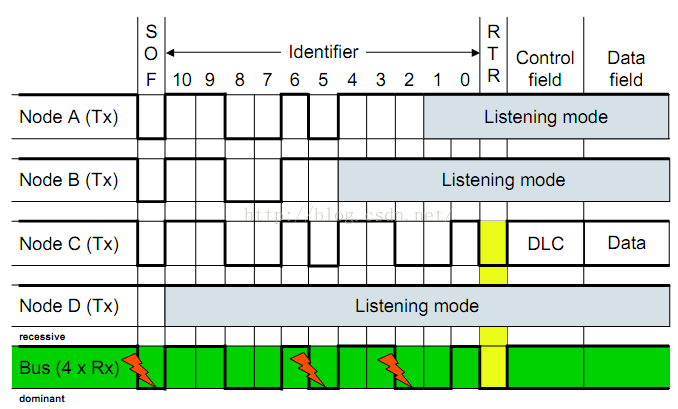
图5 冲突处理细节















 1727
1727











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









