







1. 前言
数据集为电商真实订单数据经过处理后的RFM数据,来源为本人的文章 《利用Python实现电商用户价值分层(RFM模型与基于RFM的K-Means聚类算法)》 中第五小结聚类中的k_data。在该文章中并没有对离群点进行检测,所以在本文中,将使用K-Means检测其离群点。
2.代码
2.1 数据转换
载入数据
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
plt.rcParams['font.sans-serif'] = ['SimHei']
plt.rcParams['axes.unicode_minus'] = False
plt.style.use('fivethirtyeight')
import warnings
warnings.filterwarnings("ignore")
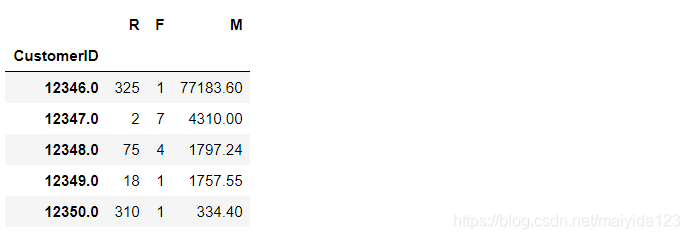
data = pd.read_csv("rfm.csv", index_col = 'CustomerID')
data.head()
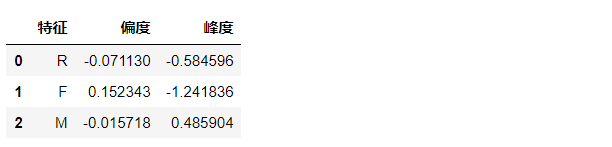
# 查看偏度、峰度
pd.DataFrame([i for i in zip(data.columns, data.skew(), data.kurt())],
columns=['特征', '偏度', '峰度'])

- 可见数据并不满足正态分布,所以接下来使用box-cox将其转换成正态分布
boxcox转换
# R中存在0值,进行box-cox转换时存在0值会将其转变成无穷大,所以将所有的值加上一个很小的数全部变成正数
data_bc = data.copy()
data_bc.R = data_bc.R + 0.0001
# boxcox转换
for i in data_bc.columns: # 自动计算λ
data_bc[i], _ = stats.boxcox(data_bc[i])
# 查看转换之后的偏度、峰度
pd.DataFrame([i for i in zip(data_bc.columns, data_bc.skew(), data_bc.kurt())],
columns=['特征', '偏度', '峰度'])
- 转换后的数据基本满足正态分布
数据标准化
from sklearn.preprocessing import scale
std_scale_data = scale(data_bc) # 标准化
std_data = pd.DataFrame(std_scale_data, columns = ['R', 'F', 'M'], index = data_bc.index)
std_data.head()
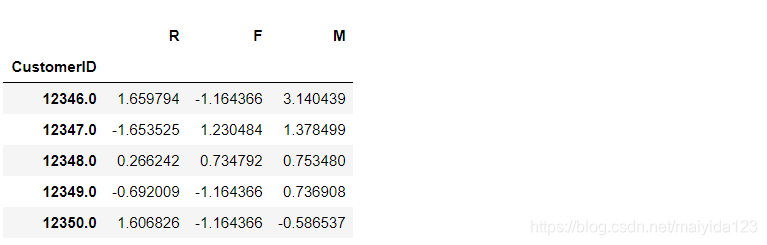
由于只有三个特征,所以无需将其降维,接下来将直接使用聚类算法决定类别
2.2 确定聚类类别
使用肘部法则确定聚类类别数
from sklearn.cluster import KMeans
# 选择K的范围 ,遍历每个值进行评估
inertia_list = []
for k in range(1,10):
model = KMeans(n_clusters = k, max_iter = 500, random_state = 12)
kmeans = model.fit(std_data)
inertia_list.append(kmeans.inertia_)
# 绘图
fig,ax = plt.subplots(figsize=(8,6))
ax.plot(range(1,10), inertia_list, '*-', linewidth=1)
ax.set_xlabel('k')
ax.set_ylabel("inertia_score")
ax.set_title('inertia变化图')
plt.show()
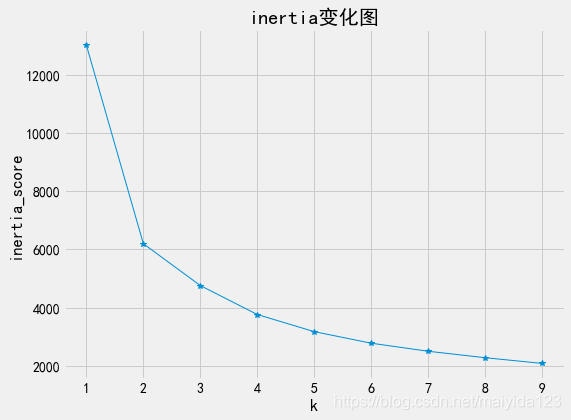
- 从上图可见,曲线在2处有明显的拐点,所以选择2类比较合适
2.3 聚类
聚类
k = 2
threshold = 3 # 阈值选择3
model = KMeans(n_clusters = k, max_iter = 500) # 分为k类
model.fit(std_data) # 开始聚类
std_data['label'] = model.labels_ # 将聚类后的类别标签生成label列
计算相对距离
relative_distance = []
for i in range(k): # 逐一处理
distance = std_data.query("label == @i")[['R', 'F', 'M']] - model.cluster_centers_[i] # 计算各点至簇中心点的距离
absolute_distance = distance.apply(np.linalg.norm, axis = 1) # 求出绝对距离
relative_distance.append(absolute_distance / absolute_distance.median()) # 求相对距离并添加
std_data['relative_distance'] = pd.concat(relative_distance) # 合并
筛选出离群点
std_data['outlier_3'] = std_data.relative_distance.apply(lambda x: 1 if x > threshold else 0)
查看离群点的数量
std_data['outlier_3'].value_counts()

- 一共检测出15个离群点
2.4 可视化
查看离群点的相对距离分布图
# 绘图查看离群点的相对距离
fig, ax = plt.subplots(figsize=(10,6))
colors = {0:'blue', 1:'red'}
ax.scatter(std_data.index, std_data.relative_distance, c=std_data.outlier_3.apply(lambda x: colors[x]))
ax.set_xlabel('客户ID')
ax.set_ylabel('相对距离')
plt.show()
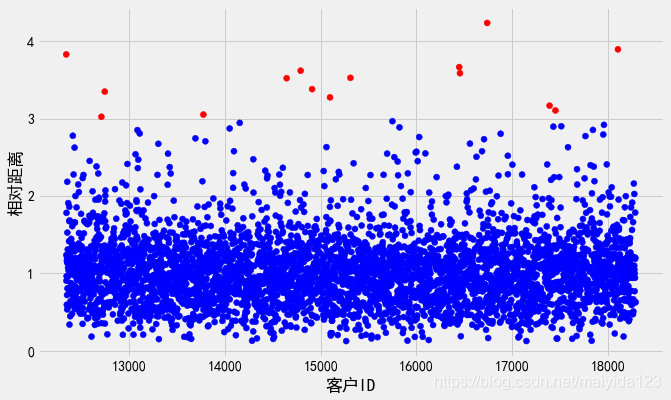
- 可以看到阈值选择为3的时候,大于3的离群点都已被选出
查看离群点在rfm三个纬度的分布图
# 查看三维分布图
from mpl_toolkits.mplot3d import Axes3D
fig = plt.figure(figsize=(12, 8), dpi=200)
ax = Axes3D(fig, rect = [0, 0, .95, 1], elev = 30, azim = -60)
ax1 = ax.scatter(std_data.query("outlier_3 == 0").R, std_data.query("outlier_3 == 0").F,
std_data.query("outlier_3 == 0").M, edgecolor = 'k', color = 'r')
ax2 = ax.scatter(std_data.query("outlier_3 == 1").R, std_data.query("outlier_3 == 1").F,
std_data.query("outlier_3 == 1").M, edgecolor = 'k', color = 'b')
ax.legend([ax1, ax2], ['正常点', '离群点'])
ax.invert_xaxis()
ax.set_xlabel('R')
ax.set_ylabel('F')
ax.set_zlabel('M')
ax.set_title('Outlier Scatter k={}'.format(threshold))
plt.show()
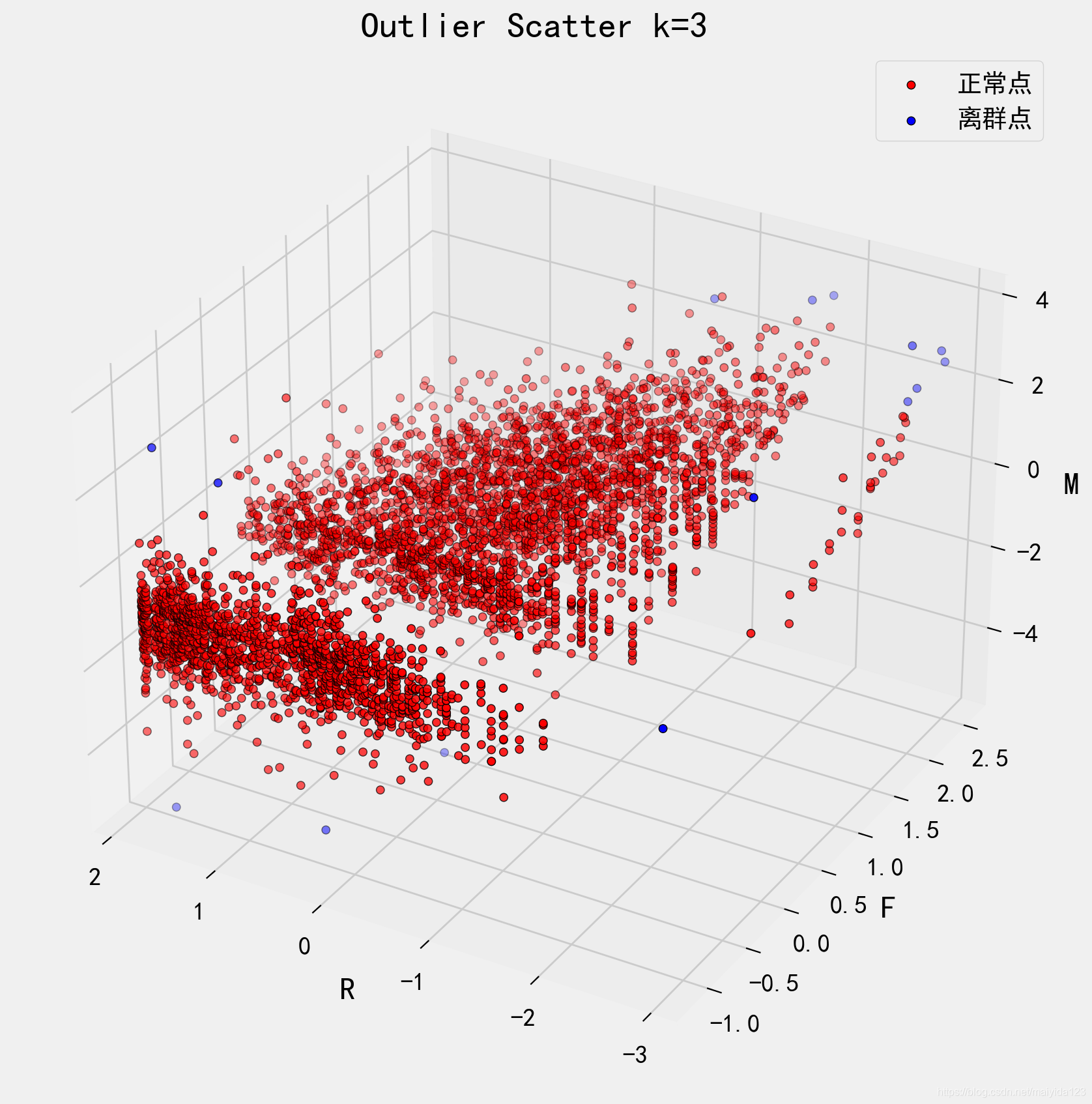
- 观察上图可以看到,检测出的离群点基本都分布在边缘
查看其R、F、M数据
data['outlier_3'] = std_data['outlier_3']
data.query("outlier_3 == 1")
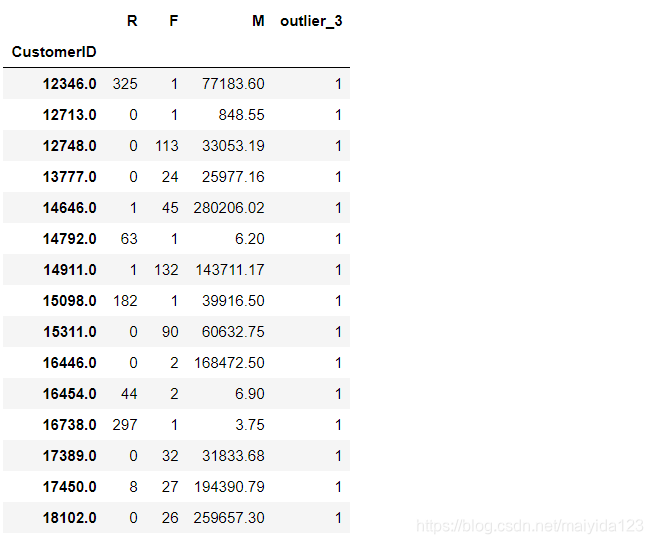
- 可以看到,特征较极端的数据会被检测为离群值。
相对距离阈值k的选取直接影响了离群值的检测,我们查看k=2时的数据分布。
std_data['outlier_2'] = std_data.relative_distance.apply(lambda x: 1 if x > 2 else 0)
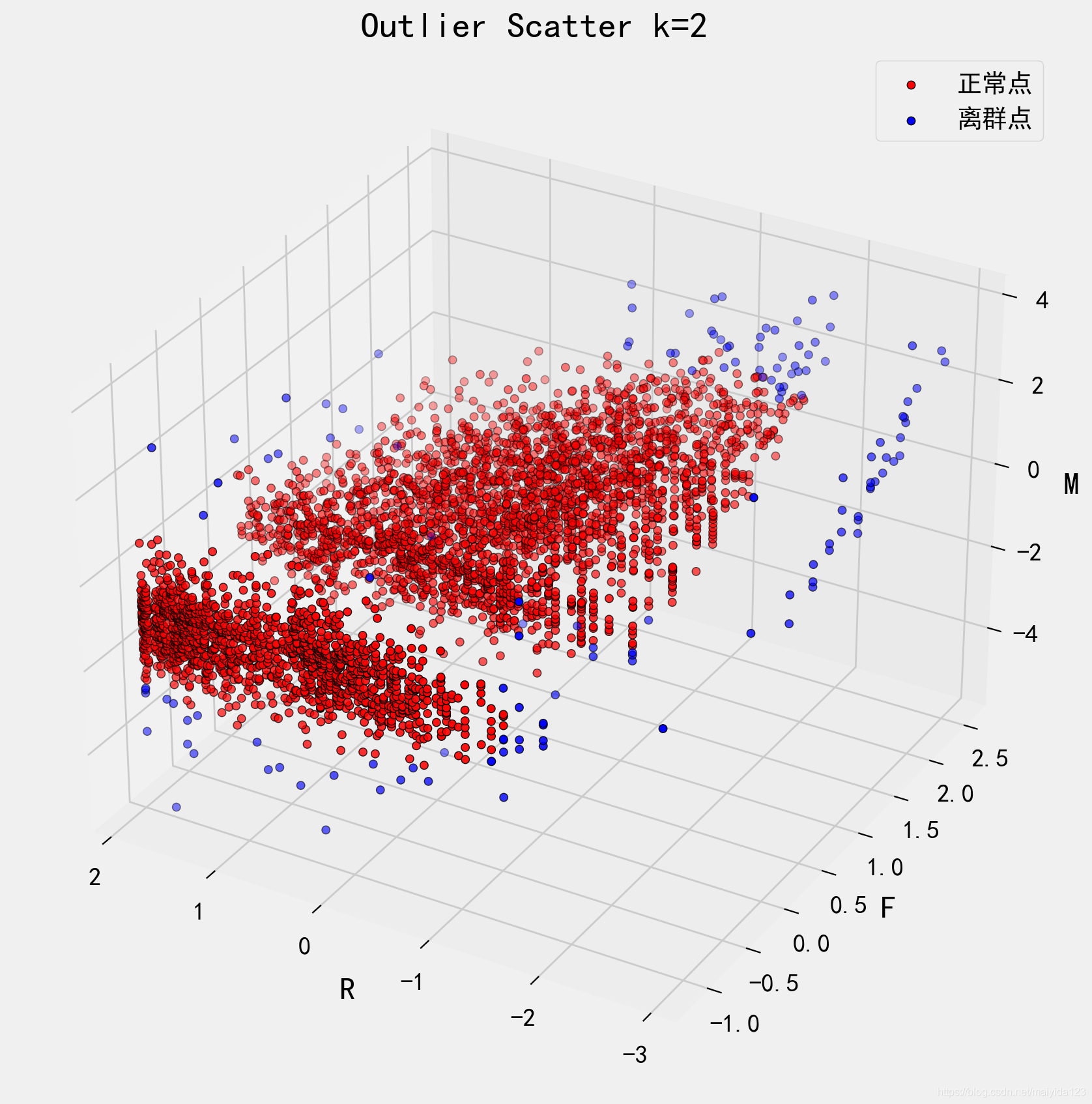
- 更多边缘的特征被检测为离群值
查看在k=2与3之间的值
# 查看在k=2与3之间的值前20个
data.query("outlier_3 ==0 & outlier_2 ==1").head(20)

可以看到,相对于k=3时检测出的离群值,k=2时的某些值显得并不那么“极端”,看起来并不符合业务逻辑。
所以k的选取尤为关键,至于如何选取k值,则需要依业务场景而论。
参考书籍:Python数据分析与挖掘实战

















 724
724

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









