







wiki上的介绍 https://en.wikipedia.org/wiki/Monte_Carlo_localization
Udacity上的课程 https://cn.udacity.com/course/artificial-intelligence-for-robotics–cs373/
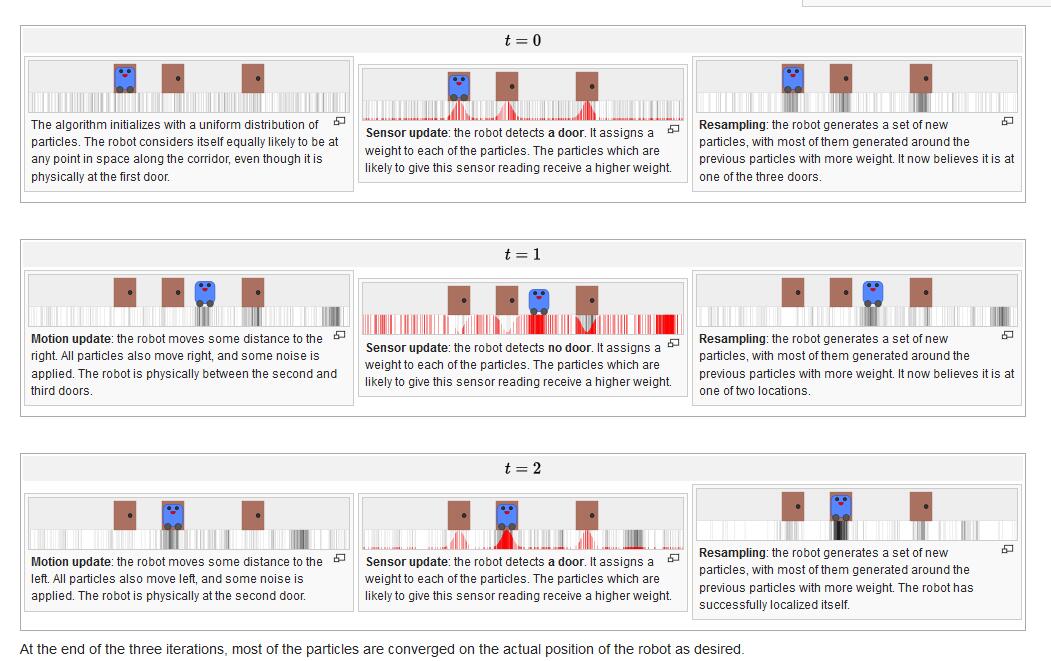
下面的例子来自优达学城
原理
假设一个机器人在一个一维的世界里,具体假设场景[R,R,G,R,R]。其中R代表红色,G代表绿色。
机器人有一个全局的分布表。
1.首先机器人为所有特征点给一个平均概率,代表最混乱的情况。
- 1/5 = 0.2, 所以机器人现在全局表是[0.2, 0.2, 0.2, 0.2, 0,2],代表机器人有0.2的概率处在对应的位置。
2.当机器人感知到对应特征的时候,会添加一个滤波器
- 机器人每感知到一个特征就会为所有的位置添加一个滤波器
- 例如 p=0.8, (1-p)=0.2,滤波器自己定义
原始状态是[0.2, 0.2, 0.2, 0.2, 0.2],当感知到R特征的时候,就为所有R的位置添加0.8的滤波器. 0.2*0.8 = 0.16, 0.2 * 0.2 = 0.04 - 然后进行归一化的处理。这里涉及到贝叶斯公式的原理。
- 最后的结果大家自己算吧。
3.然后机器人向前移动
因为机器人很难确定自己具体行进过程,所以当机器人前进的时候,需要进行卷积运算。
- 例如 p0=0.1 p1=0.8 p2=0.1,代表机器人有0.1的概念走到目标点的后面,有0.8的概率刚好到目标点,0.1的概率会超过目标点。
- 假设现在是[0.6, 0, 0, 0],机器人向前走两步,则 0.1 * 0.6 = 0.06, 0.8 * 0.6 = 0.48,结果是[0, 0.06, 0.48, 0.06],最后归一化处理。
- 需要注意的是,移动是对于全局表中所有概率都进行运算,一移动整个表都会移动的。移动完再进行归一化。这里涉及到全概率公式。
4.最后结果取最大值就是机器人的位置。
代码
这里选的是Udacity的习题,我的结果对了,但是就是提交失败,这是仅提供给大家参考
# show:
# 输入:
# 概率
# 输出:
# 格式化输出
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1447
1447

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









