






机器人运动学是轨迹规划的基础,不考虑动力学问题而是将机器人各关节看作刚体,而实际上机器人在运动过程中存在不同程度上的冲击、受力和变形,因此机器人运动学是一个在理论下的数学模型。
一般机器人通过位置和姿态来描述当前的运动状态。
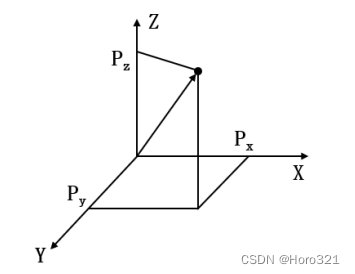
机器人在空间中的位置可以通过向量P=[px py pz]T表示,其中,px、py、pz分别表示P点在笛卡尔坐标系各坐标轴下的投影分量。
机器人在空间中的姿态通过可以通过旋转矩阵、欧拉角或四元数表示,欧拉角更加直观,旋转矩阵则是计算起来比较方便,而四元数则较为复杂。因此为了方便各坐标系之间的变换和计算,先将机器人姿态用旋转矩阵表示。
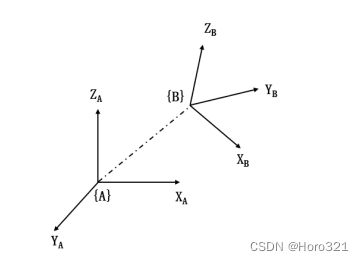
如图所示,假设坐标系A和B分别固连在机器人的两个关节上,则B相对于A的姿态可由以下3✖3的旋转矩阵表示,其中[nx、ny、nz] 分别表示 在参考坐标系{A}的 X,Y,Z 轴的投影分量。 [ox、oy、oz] 分别表示
在参考坐标系{A}的 X,Y,Z 轴的投影分量。 [ax、ay、az] 分别表示
在参考坐标系{A}的 X,Y,Z 轴的投影分量。

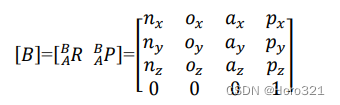
因此通过位置矢量描述刚体的位置,用旋转矩阵描述刚体的方位, 因此刚体{B}即机器人在空间原点坐标系{A}中的位置和姿态可以表述为4✖4的齐次变换矩阵:
旋转齐次变换矩阵分为绕X、Y、Z轴三种情况:
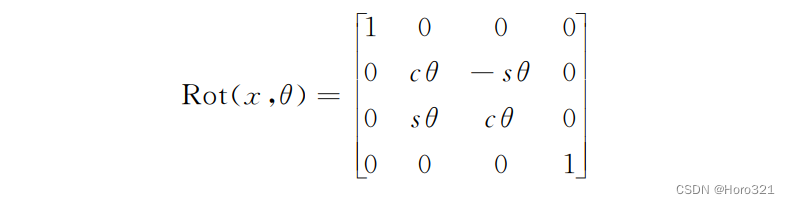
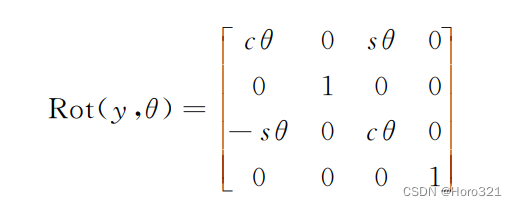
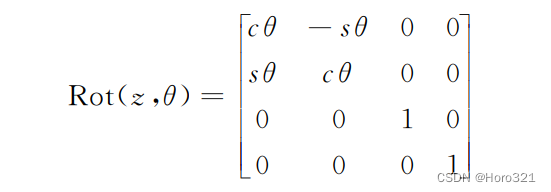
假设一个矩阵为 (坐标系1在2下的旋转变换关系),此时矩阵右乘
*Rot(x,θ)表示坐标系1绕当前坐标系即本身的X轴旋转θ角度,而矩阵左乘Rot(x,θ)*
则表示坐标系1绕世界坐标系即坐标系0的X轴旋转θ角度。由于工业机器人为六自由度串联机械臂,各关节之间的固连坐标系都是绕当前坐标系进行旋转的,因此使用右乘表示。
















 2900
2900

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











