






“在代码的海洋里,有无尽的知识等待你去发现。我就是那艘领航的船,带你乘风破浪,驶向代码的彼岸。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
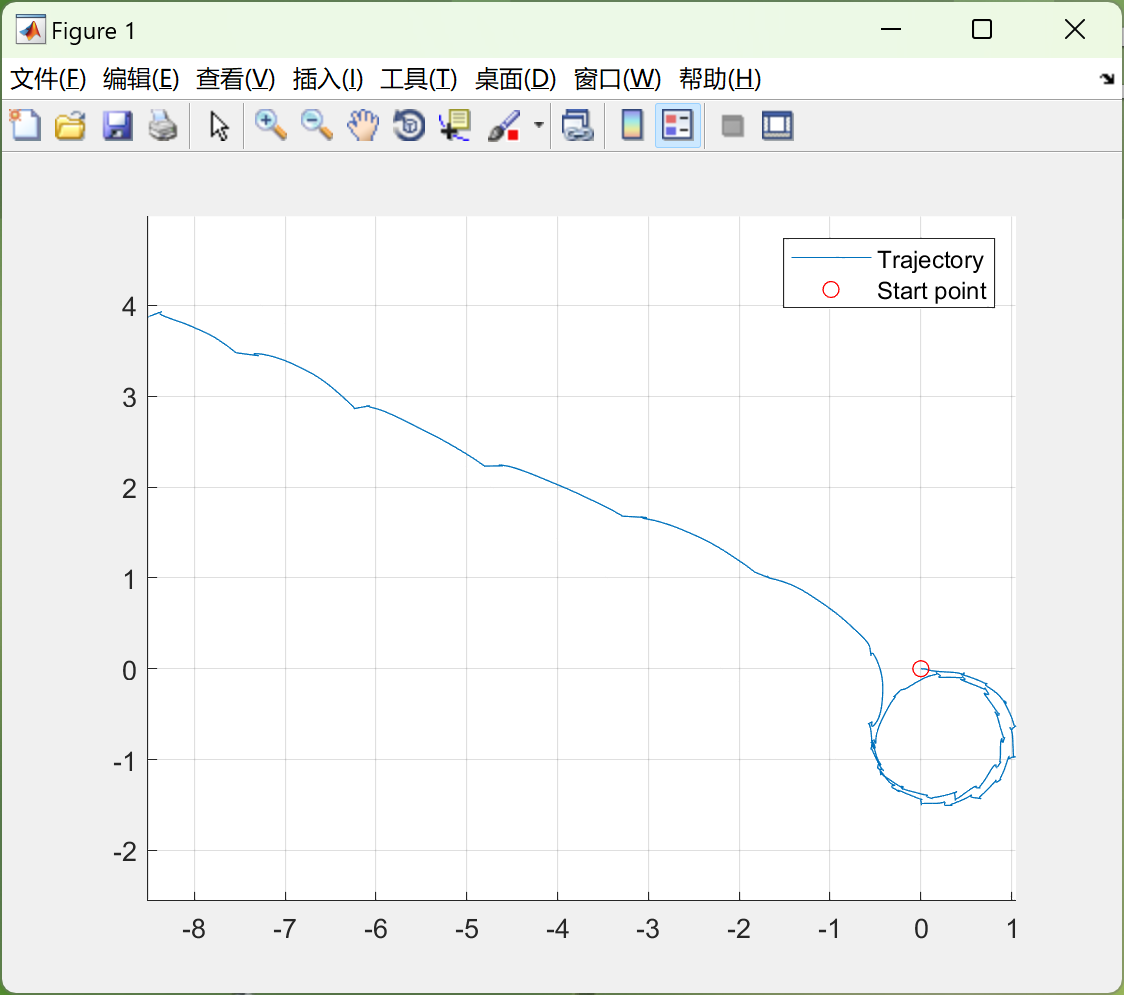
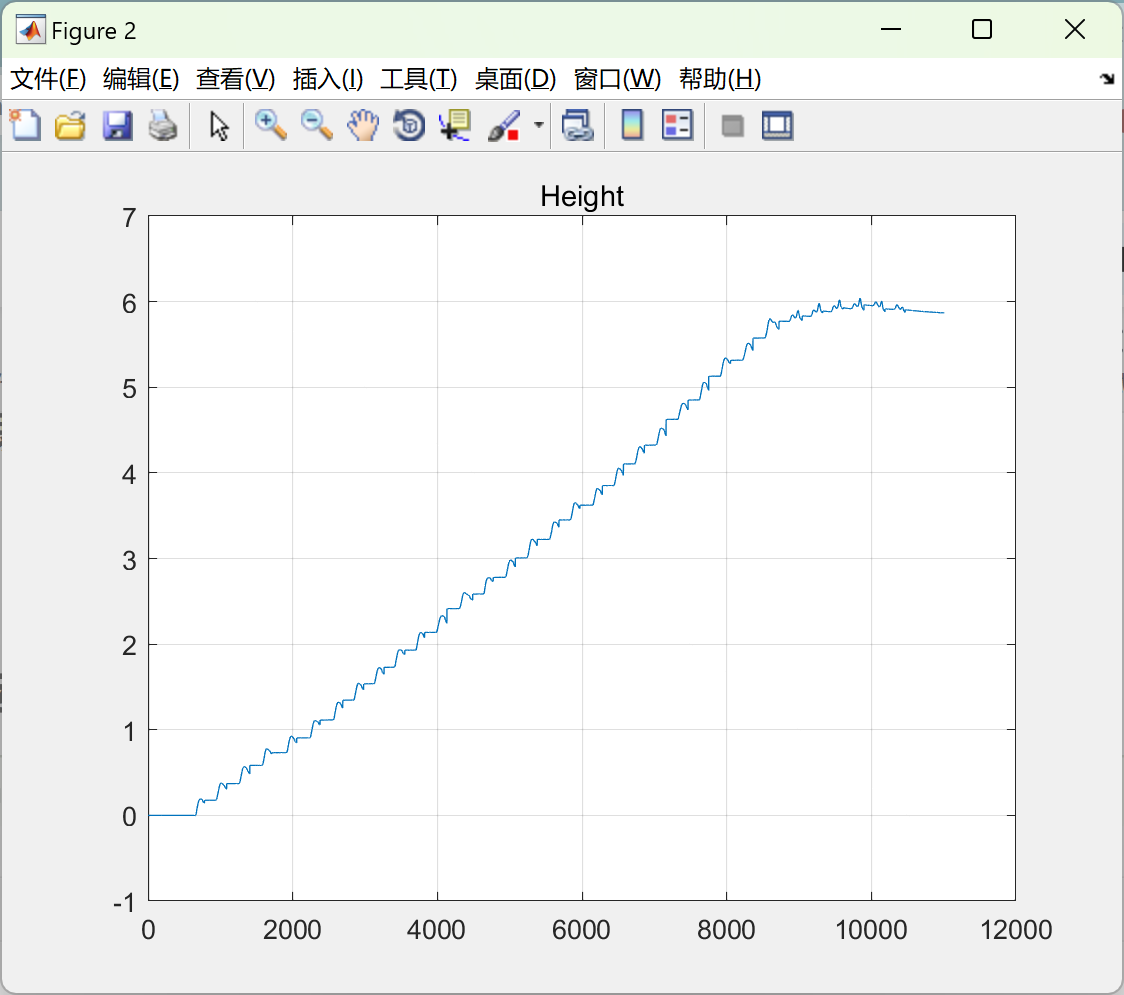
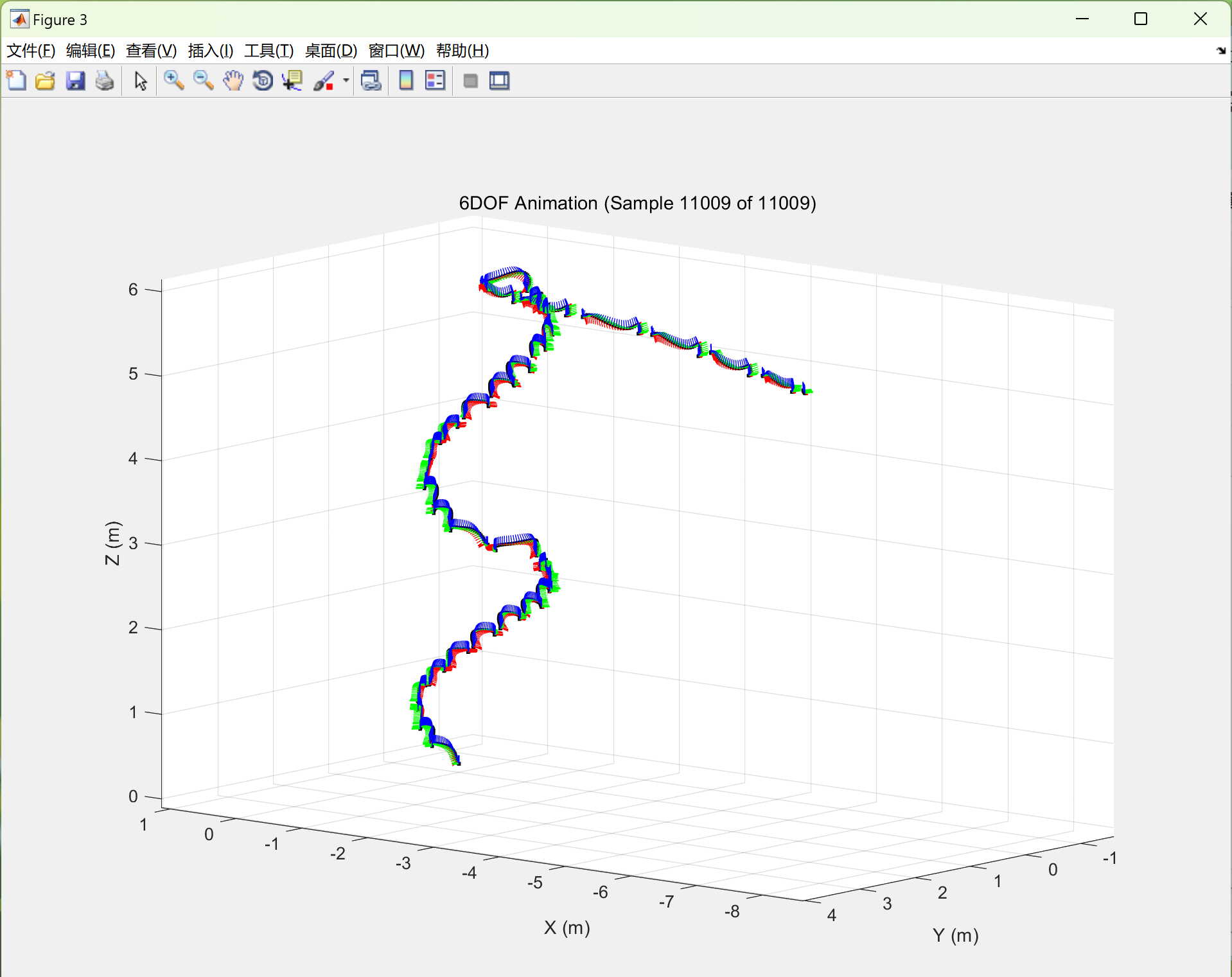
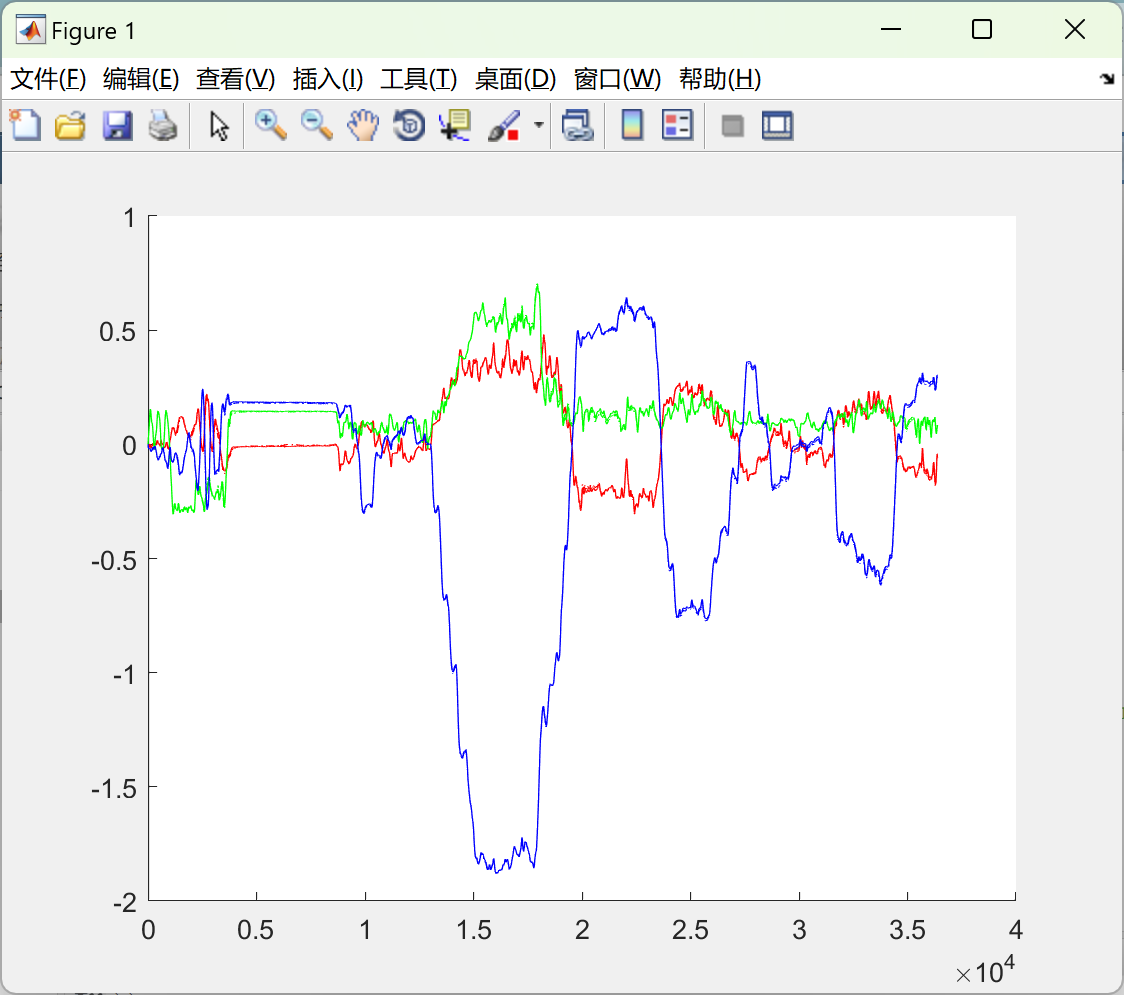
EKF(扩展卡尔曼滤波)IMU(惯性测量单元)融合算法是一种在导航和定位系统中广泛应用的技术。 IMU 能够提供关于物体运动的加速度和角速度等信息,但由于测量误差的累积,单独使用 IMU 进行长时间的定位和导航会导致较大的偏差。 EKF 则是一种有效的状态估计方法,它能够融合来自多个传感器的测量数据,以降低不确定性和误差。 在 EKF IMU 融合算法中,将 IMU 的测量值与其他传感器(如 GPS、视觉传感器等)的测量值相结合。通过建立系统的数学模型,EKF 对 IMU 的测量误差进行估计和修正,从而得到更准确和可靠的状态估计,包括位置、速度和姿态等。 这种融合算法在机器人导航、自动驾驶、航空航天等领域发挥着重要作用,能够提高系统的精度、稳定性和可靠性。
📚2 运行结果
主函数部分代码:
clear; close all; clc;
%--- Dataset parameters
deltat = 1/200; % Sampling period
noise_gyro = 2.4e-3; % Gyroscope noise(discrete), rad/s
noise_accel = 2.83e-2; % Accelerometer noise, m/s^2
gravity = 9.81007; % Gravity magnitude, m/s^2
%--- Load data
% Each row of IMU data :
% (timestamp, wx, wy, wz, ax, ay, az)
% Each row of Ground truth data :
% (time, position, quaternion, velocity, gyroscope bias, accelerometer bias)
data = load('data/attitude_data.mat');
imu_data = data.imu_data; % IMU readings
grt_data = data.grt_data; % Ground truth (GT)
grt_q = grt_data(:, 5:8); % GT quaternions
bias_w = grt_data(1, 12:14); % gyroscope bias
bias_a = grt_data(1, 15:17); % accelerometer bias
%--- Container of the results
N = length(imu_data);
allX = zeros(N, 4);
%--- Initialization
x = grt_q(1,:)'; % Initial state (quaternion)
P = 1e-10 * eye(4); % Initial covariance
allX(1,:) = x';
% ---Here we go !!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
for k = 2 : N
%--- 1. Propagation --------------------------
% Gyroscope measurements
w = (imu_data(k-1, 2:4) + imu_data(k, 2:4))/2;
w = w - bias_w;
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈徵粼,刘灏,毕天姝.基于配电网PMU的无监督电力系统扰动特征提取与分类[J/OL].中国电机工程学报:1-13[2024-01-10].https://doi.org/10.13334/j.0258-8013.pcsee.230464.
[2]刘泳,陈帝伊,张猛等.水电煤电协同发展促进电力系统低碳转型方案评价[J/OL].人民长江:1-11[2024-01-10].http://kns.cnki.net/kcms/detail/42.1202.tv.20240108.1403.004.html.
🌈4 Matlab代码实现
















 229
229

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









