







1 内容介绍
引力搜索算法(GSA)是一种基于引力定律和质量相互作用的新型启发式优化方法。实践证明,该算法具有较好的全局最优搜索能力,但在最后一次迭代中存在搜索速度较慢的问题。这项工作提出了粒子群优化 (PSO) 和 GSA 的混合体来解决上述问题。在本文中,GSA 和 PSOGSA 被用作前馈神经网络 (FNN) 的新训练方法,以研究这些算法在减少陷入局部最小值和当前进化学习算法收敛速度慢的问题方面的效率。将结果与标准的基于 PSO 的 FNN 学习算法进行比较。还研究了使用 PSO、GSA 和 PSOGSA 训练的 FNN 的准确度。实验结果表明,在收敛速度和避免局部最小值方面,PSOGSA 在训练 FNN 方面优于 PSO 和 GSA。还证明了用 PSOGSA 训练的 FNN 比用 GSA 训练的 FNN 具有更好的准确性。

2 仿真代码
%% -------------------------------------------------------------------------
clc
clear all
close all
%% Data set preparation/
load iris.txt
x=sortrows(iris,2);
H2=x(1:150,1);
H3=x(1:150,2);
H4=x(1:150,3);
H5=x(1:150,4);
T=x(1:150,5);
H2=H2';
[xf,PS] = mapminmax(H2);
I2(:,1)=xf;
H3=H3';
[xf,PS2] = mapminmax(H3);
I2(:,2)=xf;
H4=H4';
[xf,PS3] = mapminmax(H4);
I2(:,3)=xf;
H5=H5';
[xf,PS4] = mapminmax(H5);
I2(:,4)=xf;
Thelp=T;
T=T';
[yf,PS5]= mapminmax(T);
T=yf;
T=T';
%% /FNN initial parameters//
HiddenNodes=15; %Number of hidden codes
Dim=8*HiddenNodes+3; %Dimension of masses in GSA
TrainingNO=150; %Number of training samples
%% GSA/
%Configurations and initializations
noP = 30; %Number of masses
Max_iteration = 500; %Maximum number of iteration
w=2; %Inirtia weight
wMax=0.9; %Max inirtia weight
wMin=0.5; %Min inirtia weight
CurrentFitness =zeros(noP,1);
G0=1; %Gravitational constant
CurrentPosition = rand(noP,Dim); %Postition vector
Velocity = .3*randn(noP,Dim) ; %Velocity vector
acceleration=zeros(noP,Dim); %Acceleration vector
mass(noP)=0; %Mass vector
force=zeros(noP,Dim);%Force vector
%Vectores for saving the location and MSE of the best mass
gBestScore=inf;
gBest=zeros(1,Dim);
ConvergenceCurve=zeros(1,Max_iteration); %Convergence vector
%Main loop
Iteration = 0 ;
while ( Iteration < Max_iteration )
Iteration = Iteration + 1;
G=G0*exp(-20*Iteration/Max_iteration); %Equation (3.3)
force=zeros(noP,Dim);
mass(noP)=0;
acceleration=zeros(noP,Dim);
%Calculate MSEs
for i = 1:noP
for ww=1:(7*HiddenNodes)
Weights(ww)=CurrentPosition(i,ww);
end
for bb=7*HiddenNodes+1:Dim
Biases(bb-(7*HiddenNodes))=CurrentPosition(i,bb);
end
fitness=0;
for pp=1:TrainingNO
actualvalue=My_FNN(4,HiddenNodes,3,Weights,Biases,I2(pp,1),I2(pp,2), I2(pp,3),I2(pp,4));
if(T(pp)==-1)
fitness=fitness+(1-actualvalue(1))^2;
fitness=fitness+(0-actualvalue(2))^2;
fitness=fitness+(0-actualvalue(3))^2;
end
if(T(pp)==0)
fitness=fitness+(0-actualvalue(1))^2;
fitness=fitness+(1-actualvalue(2))^2;
fitness=fitness+(0-actualvalue(3))^2;
end
if(T(pp)==1)
fitness=fitness+(0-actualvalue(1))^2;
fitness=fitness+(0-actualvalue(2))^2;
fitness=fitness+(1-actualvalue(3))^2;
end
end
fitness=fitness/TrainingNO; %Equation (5.4)
CurrentFitness(i) = fitness;
if(gBestScore>fitness)
gBestScore=fitness;
gBest=CurrentPosition(i,:);
end
end
best=min(CurrentFitness);%Equation (3.10)
worst=max(CurrentFitness);%Equation (3.11)
for i=1:noP
mass(i)=(CurrentFitness(i)-0.99*worst)/(best-worst);%Equation (3.9)
end
for i=1:noP
mass(i)=mass(i)*5/sum(mass);%Equation (3.14)
end
%Calculate froces
for i=1:noP
for j=1:Dim
for k=1:noP
if(CurrentPosition(k,j)~=CurrentPosition(i,j))
%Equation (3.5)
force(i,j)=force(i,j)+ rand()*G*mass(k)*mass(i)*(CurrentPosition(k,j)-CurrentPosition(i,j))/abs(CurrentPosition(k,j)-CurrentPosition(i,j));
end
end
end
end
%Calculate a
for i=1:noP
for j=1:Dim
if(mass(i)~=0)
acceleration(i,j)=force(i,j)/mass(i);%Equation (3.6)
end
end
end
%Update inertia weight
w=wMin-Iteration*(wMax-wMin)/Max_iteration;
%Calculate V
for i=1:noP
for j=1:Dim
%Equation (4.1)
Velocity(i,j)=w*Velocity(i,j)+rand()*acceleration(i,j) + rand()*(gBest(j)-CurrentPosition(i,j));
end
end
%Calculate X
CurrentPosition = CurrentPosition + Velocity ; %Equation (4.2)
ConvergenceCurve(1,Iteration)=gBestScore;
disp(['PSOGSA is training FNN (Iteration = ', num2str(Iteration),' ,MSE = ', num2str(gBestScore),')'])
end
%% ///Calculate the classification//
Rrate=0;
Weights=gBest(1:7*HiddenNodes);
Biases=gBest(7*HiddenNodes+1:Dim);
for pp=1:TrainingNO
actualvalue=My_FNN(4,HiddenNodes,3,Weights,Biases,I2(pp,1),I2(pp,2), I2(pp,3),I2(pp,4));
if(T(pp)==-1)
if (round(actualvalue(1))==1 && round(actualvalue(2))==0 && round(actualvalue(3))==0)
Rrate=Rrate+1;
end
end
if(T(pp)==0)
if (round(actualvalue(1))==0 && round(actualvalue(2))==1 && round(actualvalue(3))==0)
Rrate=Rrate+1;
end
end
if(T(pp)==1)
if (round(actualvalue(1))==0 && round(actualvalue(2))==0 && round(actualvalue(3))==1)
Rrate=Rrate+1;
end
end
end
ClassificationRate=(Rrate/TrainingNO)*100;
disp(['Classification rate = ', num2str(ClassificationRate)]);
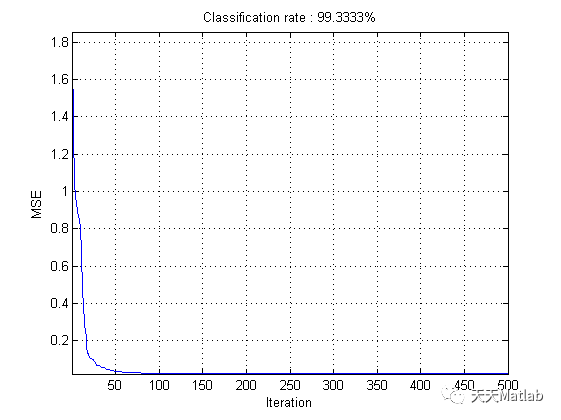
%% Draw the convergence curve
hold on;
semilogy(ConvergenceCurve);
title(['Classification rate : ', num2str(ClassificationRate), '%']);
xlabel('Iteration');
ylabel('MSE');
box on
grid on
axis tight
hold off;
3 运行结果
4 参考文献
[1] Mirjalili S A , Hashim S , Sardroudi H M . Training feedforward neural networks using hybrid particle swarm optimization and gravitational search algorithm[J]. Applied Mathematics & Computation, 2012, 218(22):11125-11137.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。
















 320
320











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











